TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025067882
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2024178633
出願日
2024-10-11
発明の名称
シーラント精度のためのビジョンシステム
出願人
ファナック アメリカ コーポレイション
代理人
個人
,
個人
,
個人
主分類
B05B
12/00 20180101AFI20250417BHJP(霧化または噴霧一般;液体または他の流動性材料の表面への適用一般)
要約
【課題】車両の継ぎ目を封止しスカイビングするための車両アセンブリシステムの提供。
【解決手段】アセンブリシステムは、ビジョンセンサを使用して車両の基準点と継ぎ目との間のオフセットを求め、該オフセットを下流の継ぎ目スカイビングステーションに送る上流の継ぎ目シーラントステーションを含む。またアセンブリシステムは、シーラントのビードのサイズを測定し、所望のサイズを維持するためにシーラントの分配圧力を制御する。
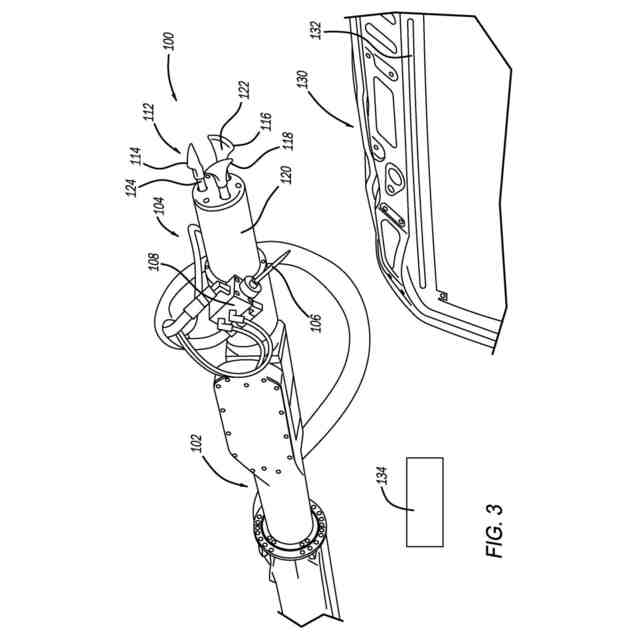
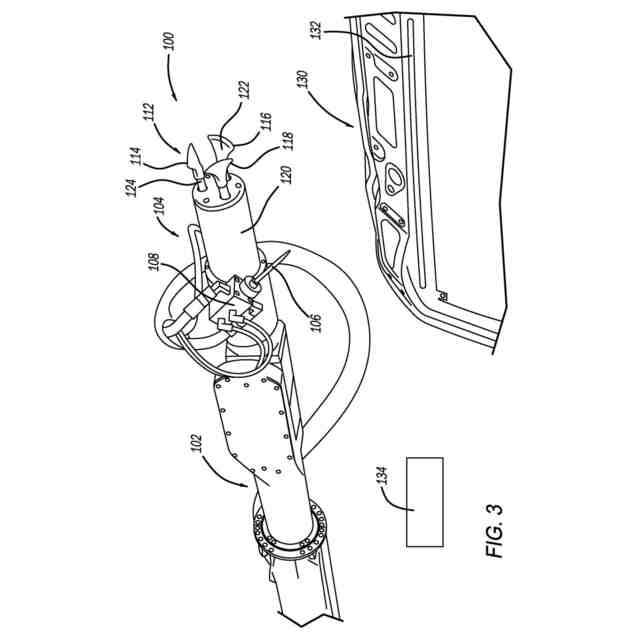
【選択図】図3
特許請求の範囲
【請求項1】
ゲージ基準穴を含む部品の継ぎ目にシーラントを塗布するためのアセンブリシステムであって、
少なくとも1つのステーションビジョンセンサと、ロボットビジョンセンサ及び分配アプリケータを有する少なくとも1つのロボットとを備えた第1アセンブリステーションであって、前記分配アプリケータは、前記継ぎ目に前記シーラントを塗布するように構成され、前記第1アセンブリステーションの前記少なくとも1つのステーションビジョンセンサは、前記部品のゲージ基準穴の画像を提供し、前記第1アセンブリステーションの前記少なくとも1つのロボットの前記ロボットビジョンセンサは、前記部品の前記継ぎ目の画像を提供する、第1アセンブリステーションと、
前記第1アセンブリステーションの下流に配置され、少なくとも1つのステーションビジョンセンサと、ロボットビジョンセンサ及びスカイブを備えた少なくとも1つのロボットとを備えた第2アセンブリステーションであって、前記スカイブは、前記部品の前記継ぎ目から余分なシーラントを除去するように構成され、前記第2アセンブリステーションの前記少なくとも1つのステーションビジョンセンサは、前記部品の前記ゲージ基準穴の画像を提供する、第2アセンブリステーションと、
前記ステーションビジョンセンサ及び前記ロボットビジョンセンサからの信号に応答する制御システムであって、前記制御システムは、前記第1アセンブリステーション及び前記第2アセンブリステーションの双方の前記ステーションビジョンセンサからの信号を使用して、空間内の前記部品の向き及び位置を特定し、前記第1アセンブリステーションの前記少なくとも1つのロボットの前記ロボットビジョンセンサからの信号を使用して、前記部品の前記ゲージ基準穴に対する前記継ぎ目のオフセットを提供し、前記制御システムは、前記第1アセンブリステーションから前記第2アセンブリステーションへのオフセットを提供し、それにより前記第2アセンブリステーションは、前記第1アセンブリステーションで求められた前記ゲージ基準穴に対する前記継ぎ目の位置を認識する、制御システムと、
を有する、アセンブリシステム。
続きを表示(約 1,900 文字)
【請求項2】
前記制御システムは、前記第1アセンブリステーションの前記少なくとも1つのロボットの前記ロボットビジョンセンサからの信号を使用して、前記分配アプリケータによって分配されたシーラントのサイズを測定し、前記シーラントの特定のサイズを維持するように前記分配アプリケータの分配圧力を制御する、請求項1に記載のアセンブリシステム。
【請求項3】
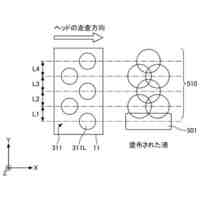
前記制御システムは、前記第1アセンブリステーションの前記少なくとも1つのロボットの前記ロボットビジョンセンサからの信号を使用して、前記継ぎ目上の複数の点において前記シーラントのサイズを測定し、個々の継ぎ目の幅データを提供する、請求項2に記載のアセンブリシステム。
【請求項4】
前記シーラントの前記特定のサイズは、3mmから12mmの範囲である、請求項1に記載のアセンブリシステム。
【請求項5】
前記第1アセンブリステーションは、前記部品の前記継ぎ目から余分なシーラントを除去するように構成されたスカイブを含み、前記第2アセンブリステーションは、前記継ぎ目にシーラントを塗布するように構成された分配アプリケータを含む、請求項1に記載のアセンブリシステム。
【請求項6】
前記部品は車両である、請求項1に記載のアセンブリシステム。
【請求項7】
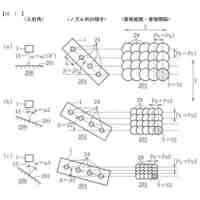
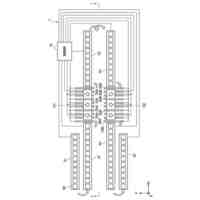
前記第1アセンブリステーションの前記少なくとも1つのステーションビジョンセンサは、前記部品の一方の側に配置された第1及び第2のビジョンセンサ、並びに、前記部品の他方の側に配置された第3及び第4のビジョンセンサであり、前記第2アセンブリステーションの前記少なくとも1つの前記ステーションビジョンセンサは、前記部品の一方の側に配置された第5及び第6のビジョンセンサ、並びに、前記部品の他方の側に配置された第7及び第8のビジョンセンサである、請求項1に記載のアセンブリシステム。
【請求項8】
前記第1アセンブリステーションの前記少なくとも1つのロボットは、前記部品の一方の側のレール上にスライド可能に配置された第1ロボット及び第2ロボット、並びに、前記部品の他方の側のレール上にスライド可能に配置された第3ロボット及び第4ロボットであり、前記第2アセンブリステーションの前記少なくとも1つのロボットは、前記部品の一方の側のレール上にスライド可能に配置された第5ロボット及び第6ロボット、並びに、前記部品の他方の側のレール上にスライド可能に配置された第7ロボット及び第8ロボットである、請求項1に記載のアセンブリシステム。
【請求項9】
ゲージ基準穴を含む部品の継ぎ目にシーラントを塗布するためのアセンブリシステムであって、
少なくとも1つのステーションビジョンセンサと、ロボットビジョンセンサ及び分配アプリケータを有する少なくとも1つのロボットとを備えたアセンブリステーションであって、前記分配アプリケータは、前記部品の前記継ぎ目にシーラントを塗布するように構成され、前記少なくとも1つのステーションビジョンセンサは、前記部品のゲージ基準穴の画像を提供し、前記少なくとも1つのロボットの前記ロボットビジョンセンサは、前記部品の前記継ぎ目の画像を提供する、アセンブリステーションと、
前記少なくとも1つのロボットの前記ロボットビジョンセンサ及び前記少なくとも1つのステーションビジョンセンサからの信号に応答する制御システムであって、前記制御システムは、前記少なくとも1つのステーションビジョンセンサからの信号を使用して、空間内の前記部品の向き及び位置を特定し、前記少なくとも1つのロボットの前記ロボットビジョンセンサからの信号を使用して、前記部品の前記ゲージ基準穴に対する前記継ぎ目のオフセットを提供し、前記制御システムは、前記少なくとも1つのロボットの前記ロボットビジョンセンサからの信号を使用して、前記分配アプリケータによって分配されたシーラントのサイズを測定し、前記制御システムは、前記シーラントの特定のサイズを維持するように前記分配アプリケータの分配圧力を制御する、制御システムと、
を有する、アセンブリシステム。
【請求項10】
前記制御システムは、前記少なくとも1つのロボットの前記ロボットビジョンセンサからの信号を使用して、前記継ぎ目上の複数の点において前記シーラントのサイズを測定し、個々の継ぎ目データを提供する、請求項9に記載のアセンブリシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
(関連出願の相互参照)
本願は、2023年10月12日に提出された、タイトルを「Robotic Sealer Dispense and Skive Applicator and Process」とする米国仮出願第63/589730号の優先権の利益を主張するものである。
続きを表示(約 2,600 文字)
【0002】
本開示は、広くは、車両のシームを封止しスカイビングするための車両アセンブリシステムに関し、特には、ビジョンセンサを使用して車両基準点と継ぎ目との間のオフセットを求め、そのオフセットを下流の継ぎ目スカイビングステーションに送る上流の継ぎ目シーラントステーションを含む、車両のシームを封止しスカイビングするための車両アセンブリシステムに関する。
【背景技術】
【0003】
種々のアセンブリは、シールを必要とする。これらのアセンブリの1つは車両である。例えば、車両は、湿気や煙が車室内に侵入することを防ぐために、フロントガラス、リアウィンドウ、ライトカバー等の特定の車両部品の周囲にシールを必要とすることが多い。現在の車両塗装工場のシーリングプロセスでは、通常、液体ポリ塩化ビニル(PVC)シーラント等の粘性シーラントを手作業で塗布する必要がある。現在のプロセスでは、手作業のオペレータが継ぎ目からシーラントを拭き取り(剥ぎ取り又は削り取り)、継ぎ目に少量のシーラントを残す必要があるが、これは非常に労働集約的なプロセスであり、余分なシーラントが無駄になるため、コストがかかる。このことは、シールされた車体に部品を取り付けるために必要である。
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両の製造工程では、車両のフロアパン又はサブフレームに設けられたゲージ穴が、車体構造を構築するための重要な基準点として使用される。車両のサブアセンブリ及びパネルは、ゲージ穴を基準線として使用して組み立てられる。車両の組み立て中は、車両の外観にとって重要な主たる車体特徴を維持する必要がある。車体外装の寸法要件を満たすために、車体パネルの継ぎ目を使用して主たる車体特徴を調整する。これにより、継ぎ目のドリフトが発生し、主たる車体特徴を補正するために継ぎ目が常に寸法的に移動する。車両の継ぎ目は、プロセス要件を満たすための小さなシーラントのビードを要する。既知のシステムでは、プロセス又は固定センサのための継ぎ目のドリフトを測定するためにビジョンセンサを使用する。このビジョンプロセスは、非常に時間がかかる。
【0005】
PVCシーラントは大型のバッチミキサで製造されるため、バッチ毎に粘度にばらつきが生じる。また、PVCシーラントは触媒処理されているため、経年変化に非常に敏感であり、このことは材料の粘度にも影響する。この粘度のばらつきにより、シーラントの継ぎ目上への塗布にばらつきが生じ、継ぎ目に塗布されたシーラントのビードシーム幅にばらつきが生じる。シーラントのビードが狭すぎると、車両内に水が漏れて保証請求が発生する可能性がある。シーラントのビードが広すぎると、干渉点からシーラントの大きなビードを取り除くことなくサブアセンブリを車両に組み立てることができないという、アセンブリのフィットアップに関する問題が生じ、生産車両を手作業で修理する必要が生じる。エンドユーザが現在行う正しい処置は、材料の粘度の変化を補正するために、各ビード/継ぎ目の予圧を手作業で調整することである。この手作業の調整手順は非常に時間がかかる。
【0006】
現代の車両の組み立てでは、車体の溶接や塗装等、種々のタスクを実行するためにロボットが使用されている。車両組立ロボットが行うタスクは、より複雑かつ緻密になっている。緻密な車両部位へのシーラントの塗布は、ロボットがより有用となっている分野の1つである。しかし、テールランプの領域等、車両の特定の領域の継ぎ目は寸法が不安定であるため、ロボットによるシーラントの塗布はより困難になっている。
【課題を解決するための手段】
【0007】
以下の議論では、ゲージ基準穴を含む車両の継ぎ目にシーラントを塗布するための車両アセンブリシステムを開示し、説明する。アセンブリシステムは、少なくとも1つのビジョンセンサと、ビジョンセンサ及び分配アプリケータを有する少なくとも1つのロボットとを備えた第1アセンブリステーションを含み、分配アプリケータはシーラントを継ぎ目に塗布するように構成される。第1アセンブリステーションの少なくとも1つのビジョンセンサは、車両のゲージ基準穴の画像を提供し、第1アセンブリステーションの少なくとも1つのロボットのビジョンセンサは、車両の継ぎ目の画像を提供する。アセンブリシステムはさらに、第1アセンブリステーションの下流に配置され、少なくとも1つのビジョンセンサと、ビジョンセンサ及びスカイブを備えた少なくとも1つのロボットとを備えた第2アセンブリステーションを含み、スカイブは、車両の継ぎ目から余分なシーラントを除去するように構成される。第2アセンブリステーションの少なくとも1つのビジョンセンサは、車両のゲージ基準穴の画像を提供する。またアセンブリシステムは、ビジョンセンサからの信号に応答する制御システムを含む。制御システムは、第1及び第2アセンブリステーションの双方にある少なくとも1つのビジョンセンサからの信号を使用して、空間内の車両の向き及び位置を特定し、第1アセンブリステーションにある少なくとも1つのロボット上のビジョンセンサからの信号を使用して、車両のゲージ基準穴に対する継ぎ目のオフセットを提供する。制御システムは、第1アセンブリステーションから第2アセンブリステーションへのオフセットを提供し、それにより第2アセンブリステーションは、第1アセンブリステーションで求められたゲージ基準穴に対する継ぎ目の位置を認識する。また制御システムは、第1アセンブリステーションにある少なくとも1つのロボット上のビジョンセンサからの信号を使用して、分配アプリケータによって分配されたシーラントのサイズを測定し、シーラントの特定のサイズを維持するように分配アプリケータの分配圧力を制御する。
【0008】
本開示の追加の特徴は、添付の図面と併せて、以下の説明及び特許請求の範囲から明らかになるであろう。
【図面の簡単な説明】
【0009】
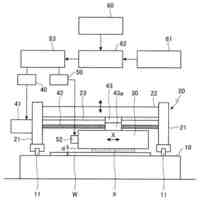
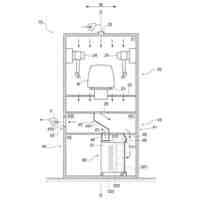
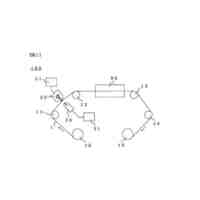
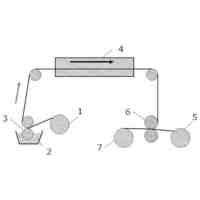
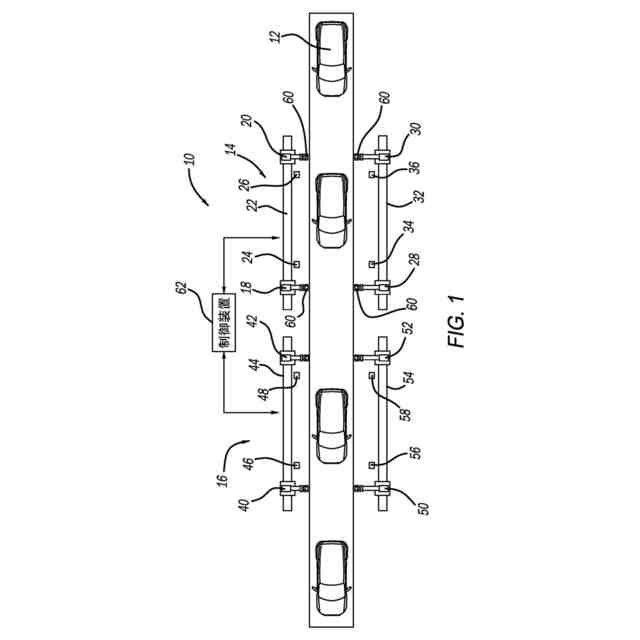
車両にシーラントを塗布する組立ラインの図である。
【0010】
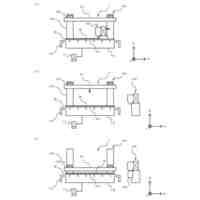
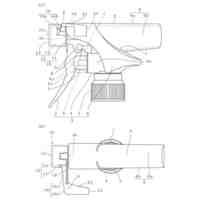
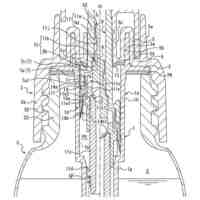
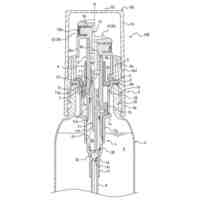
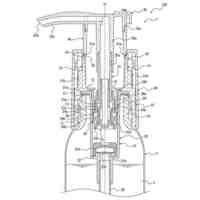
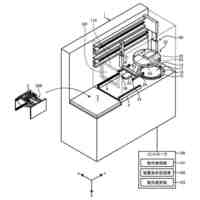
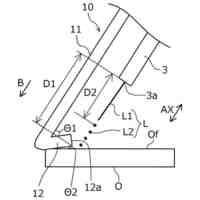
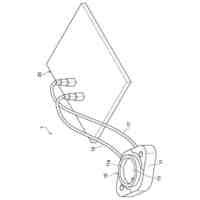
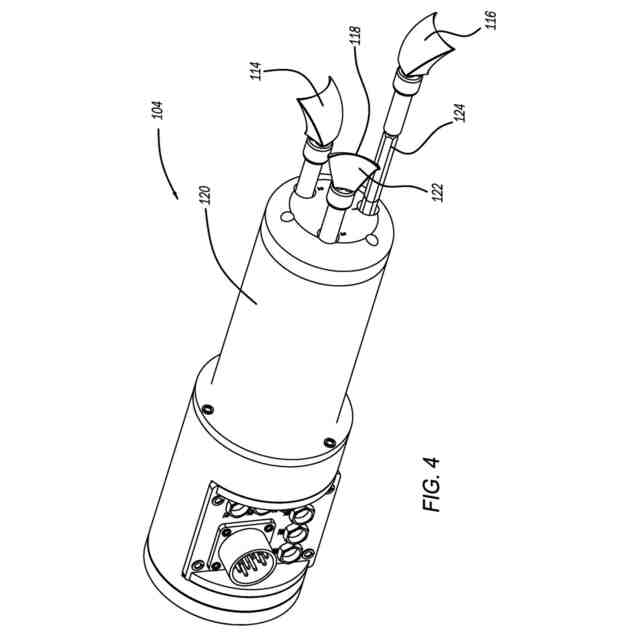
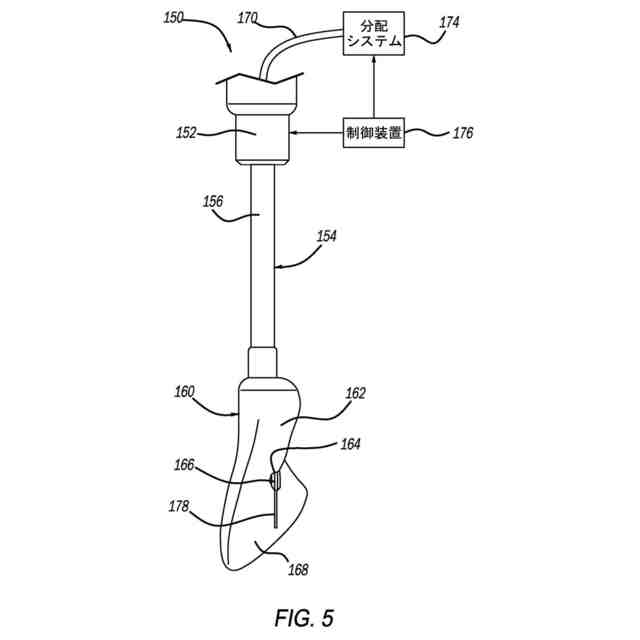
ロボットアームに取り付けられた精密なシーリングアプリケータを含むロボットの切り欠き等角図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ベック株式会社
被膜形成方法
15日前
菊水化学工業株式会社
塗装方法
1か月前
中外炉工業株式会社
塗布装置
23日前
ベック株式会社
装飾被膜の形成方法
29日前
株式会社デュプロ
シート装飾方法
3か月前
東レエンジニアリング株式会社
塗布装置
10日前
兵神装備株式会社
塗布検査システム
1か月前
富士合成株式会社
スラッジ回収構造
1か月前
株式会社大気社
塗装装置
2か月前
株式会社吉野工業所
トリガー式吐出器
1か月前
株式会社吉谷機械製作所
放水装置
2か月前
株式会社マキタ
グリース吐出装置
1日前
株式会社吉野工業所
吐出器
2か月前
日本リグランド株式会社
流体散布ユニット
1か月前
トヨタ自動車東日本株式会社
塗料調色方法
24日前
株式会社吉野工業所
液体噴出器
1か月前
個人
ホースやノズルの長尺部の挟持具
22日前
兵神装備株式会社
流動物供給装置
3か月前
株式会社リコー
液滴吐出装置及び液滴吐出方法
29日前
株式会社吉野工業所
ポンプ式吐出器
2か月前
東レ株式会社
シート状基材への塗布装置および塗布方法
2か月前
株式会社リコー
液体塗布装置及びキャッピング方法
29日前
株式会社カネカ
積層体の製造方法、及び成形体の製造方法
今日
株式会社ディスコ
被覆装置
15日前
株式会社リコー
液体吐出装置及び液体吐出方法
1か月前
株式会社不二越
塗布装置
1か月前
アスザック株式会社
塗液回収器およびスピンコーター
1か月前
セイコーエプソン株式会社
液体噴射装置
1か月前
トヨタ自動車株式会社
集電箔の製造方法
16日前
本多電子株式会社
超音波霧化装置及び超音波霧化方法
3か月前
兵神装備株式会社
ノズルおよび塗布装置
3か月前
トヨタ自動車株式会社
集電箔の製造方法
16日前
株式会社ウレタンメンテナンスサービス
塗布装置
2か月前
TDK株式会社
霧化装置、及び、霧化方法
2か月前
山陽特殊製鋼株式会社
スプレー機
3か月前
株式会社カワタ
コーティング装置およびコーティング方法
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ