TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025060730
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2024221825,2023176813
出願日
2024-12-18,2018-11-22
発明の名称
動きベクトル予測方法及び関連する装置
出願人
華為技術有限公司
,
HUAWEI TECHNOLOGIES CO.,LTD.
代理人
弁理士法人ITOH
主分類
H04N
19/105 20140101AFI20250403BHJP(電気通信技術)
要約
【課題】本願は、動きベクトル予測方法及び関連する装置を提供する。
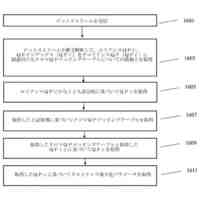
【解決手段】方法は、候補動きベクトルリストのインデックス値を取得するようビットストリームをパースすることと、現在のブロックのK個の制御点の候補動きベクトルを含む候補動きベクトルリストを構成することであり、K個の制御点の候補動きベクトルは、現在のブロックの隣接ブロックに使用されている2Nパラメータアフィン変換モデルに基づいて取得され、Nは2以上4以下の整数であり、Kは2以上4以下の整数であり、NはKと等しくない、ことと、候補動きベクトルリストの中で、インデックス値に基づいてK個の制御点の対象候補動きベクトルを決定することと、K個の制御点の対象候補動きベクトルに基づいて現在のブロックの各サブブロックの予測動きベクトルを取得することとを含む。本願は、オーディオ及びビデオコーディング処理のコーディング効率を改善するのを助け、ユーザ要求を満足する。
【選択図】図9
特許請求の範囲
【請求項1】
符号化デバイスによって実施されるビデオ画像符号化方法であって、
現在のブロックのアフィンモデルが2×Kパラメータアフィン変換モデルであり、前記現在のブロックの近傍ブロックのアフィン変換モデルが2×Nパラメータアフィン変換モデルである場合に、前記近傍ブロックのための前記2×Nパラメータアフィン変換モデルに従って、前記現在のブロックのK個の制御点の候補動きベクトル予測子を取得することであり、前記2×Nパラメータアフィン変換モデルは、前記近傍ブロックのN個の制御点の動きベクトルに基づいて取得され、Nは2に等しい整数であり、Kは3に等しい整数であり、前記近傍ブロックは、前記現在のブロックに空間的に近接する符号化された画像ブロックであり、前記現在のブロックは、複数のサブブロックを含む、前記取得することと、
前記現在のブロックの前記K個の制御点の前記候補動きベクトル予測子を含む制御点動きベクトル予測子候補リストを構成することと、
前記制御点動きベクトル予測子候補リストの中で、前記K個の制御点の対象候補動きベクトル予測子をレート歪みコストに基づき決定することと、
前記現在のブロックの前記K個の制御点の前記対象候補動きベクトル予測子及び前記現在のブロックの前記K個の制御点の動きベクトルに従って、前記現在のブロックの前記K個の制御点の動きベクトル差分(MVD)を取得することと、
前記制御点動きベクトル予測子候補リストにおける前記K個の制御点の前記対象候補動きベクトル予測子の位置を示すインデックス値と、前記現在のブロックの前記K個の制御点の前記MVDとをビットストリームに符号化することと
を有する符号化方法。
続きを表示(約 2,500 文字)
【請求項2】
前記現在のブロックの3つの制御点の候補動きベクトル予測子は、前記現在のブロック前記近傍ブロックのための4パラメータアフィン変換モデルに基づき取得され、前記近傍ブロックの前記N個の制御点は、前記近傍ブロックの左上制御点及び右上制御点であるが、前記現在のブロックの前記K個の制御点は、前記現在のブロックの左上制御点、左下制御点及び右上制御点である、
請求項1に記載の符号化方法。
【請求項3】
前記現在のブロックの前記3つの制御点の前記候補動きベクトル予測子は、前記現在のブロックの左上サンプル位置での動きベクトル予測子、前記現在のブロックの右上サンプル位置での動きベクトル予測子、及び前記現在のブロックの左下サンプル位置での動きベクトル予測子を含む、
請求項2に記載の符号化方法。
【請求項4】
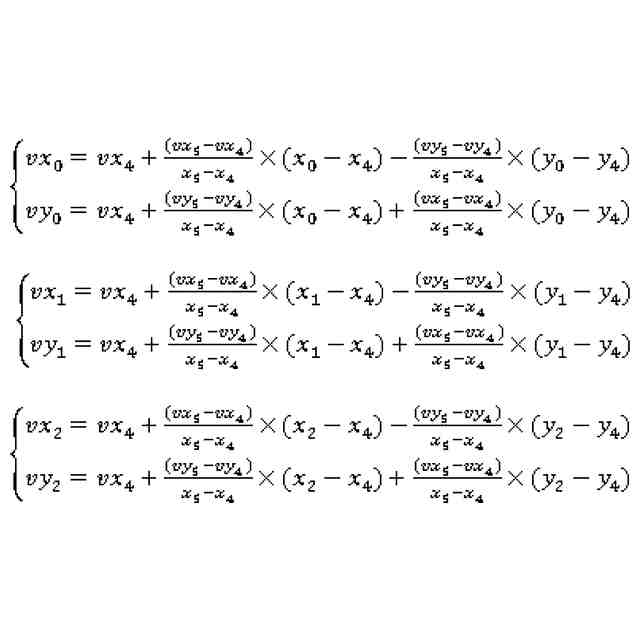
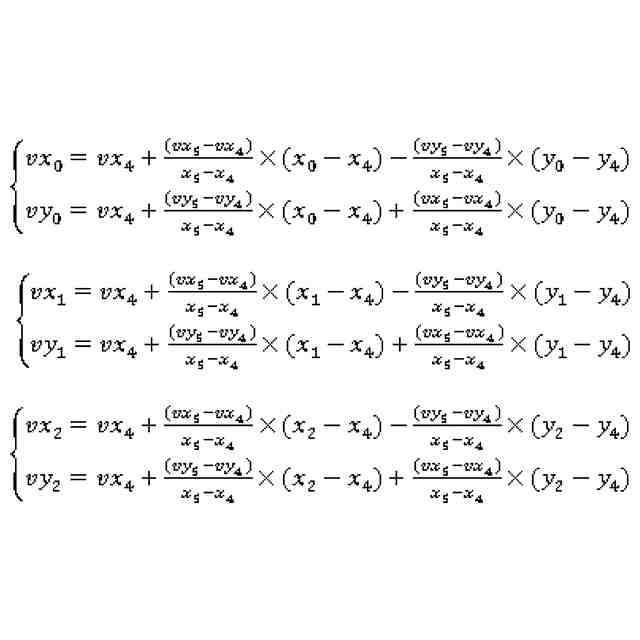
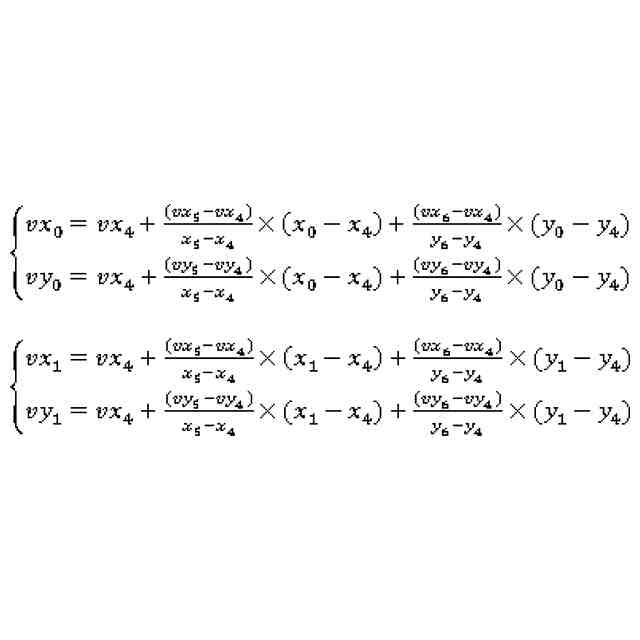
前記現在のブロックの前記3つの制御点の前記候補動きベクトル予測子は、次の式
TIFF
2025060730000041.tif
71
169
に従って計算され、
vx
0
は、前記現在のブロックの前記左上サンプル位置に対応する動きベクトル予測子の水平成分であり、vy
0
は、前記現在のブロックの前記左上サンプル位置に対応する動きベクトル予測子の垂直成分であり、vx
1
は、前記現在のブロックの前記右上サンプル位置に対応する動きベクトル予測子の水平成分であり、vy
1
は、前記現在のブロックの前記右上サンプル位置に対応する動きベクトル予測子の垂直成分であり、vx
2
は、前記現在のブロックの前記左下サンプル位置に対応する動きベクトル予測子の水平成分であり、vy
2
は、前記現在のブロックの前記左下サンプル位置に対応する動きベクトル予測子の垂直成分であり、vx
4
は、前記近傍ブロックの左上サンプル位置に対応する動きベクトルの水平成分であり、vy
4
は、前記近傍ブロックの前記左上サンプル位置に対応する動きベクトルの垂直成分であり、vx
5
は、前記近傍ブロックの右上サンプル位置に対応する動きベクトルの水平成分であり、vy
5
は、前記近傍ブロックの前記右上サンプル位置に対応する動きベクトルの垂直成分であり、x
0
は、前記現在のブロックの前記左上サンプル位置の水平座標であり、y
0
は、前記現在のブロックの前記左上サンプル位置の垂直座標であり、x
1
は、前記現在のブロックの前記右上サンプル位置の水平座標であり、y
1
は、前記現在のブロックの前記右上サンプル位置の垂直座標であり、x
2
は、前記現在のブロックの前記左下サンプル位置の水平座標であり、y
2
は、前記現在のブロックの前記左下サンプル位置の垂直座標であり、x
4
は、前記近傍ブロックの前記左上サンプル位置の水平座標であり、y
4
は、前記近傍ブロックの前記左上サンプル位置の垂直座標であり、x
5
は、前記近傍ブロックの前記右上サンプル位置の水平座標であり、y
5
は、前記近傍ブロックの前記右上サンプル位置の垂直座標である、
請求項3に記載の符号化方法。
【請求項5】
当該符号化方法は、アドバンスト動きベクトル予測(AMVP)モードで使用されるか、あるいは、前記制御点動きベクトル予測子候補リストは、前記AMVPモードに対応する制御点動きベクトル予測子候補リストであるか、あるいは、前記対象候補動きベクトル予測子の前記インデックス値は、前記AMVPモードに対応する前記制御点動きベクトル予測子候補リストのインデックス値である、
請求項3に記載の符号化方法。
【請求項6】
符号化デバイスであって、
1つ以上のプロセッサと、
前記1つ以上のプロセッサへ結合され、前記1つ以上のプロセッサによって実行されるプログラミング命令を記憶するコンピュータ可読記憶媒体と
を有し、
前記プログラミング命令は、前記1つ以上のプロセッサによって実行されるとき、前記符号化デバイスに、請求項1乃至5のうちいずれか一項に記載の符号化方法を実行させる、
符号化デバイス。
【請求項7】
ビデオ画像の符号化のためのコンピュータ命令を記憶する非一時的なコンピュータ可読媒体であって、
前記コンピュータ命令は、1つ以上のプロセッサによって実行される場合に、前記1つ以上のプロセッサに、請求項1乃至5のうちいずれか一項に記載の符号化方法を実行させる、非一時的なコンピュータ可読媒体。
【請求項8】
ビットストリームを伝送する方法であって、
少なくとも1つのビットストリームを少なくとも1つの記憶デバイスに記憶することであり、前記ビットストリームは請求項1乃至5のうちいずれか一項に記載の符号化方法に従って生成される、前記記憶することと、
前記少なくとも1つの記憶デバイスから1つ以上のビットストリームを取得することと、
前記1つ以上のビットストリームをあて先デバイスへ伝送することと
を有する方法。
【請求項9】
ビットストリームを伝送するデバイスであって、
少なくとも1つのビットストリームを記憶するよう構成され、前記ビットストリームは請求項1乃至5のうちいずれか一項に記載の符号化方法に従って生成される、少なくとも1つの記憶デバイスと、
前記少なくとも1つの記憶デバイスの1つから対象ビットストリームを取得し、該対象ビットストリームをあて先デバイスへ伝送するよう構成される少なくとも1つのプロセッサと
を有するデバイス。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、ビデオコーディング技術の分野に、特に、ビデオ画像の動きベクトルを予測する方法及び装置と、対応する符号器及び復号器とに関係がある。
続きを表示(約 3,900 文字)
【背景技術】
【0002】
ビデオコーディング(ビデオ符号化及び復号化)は、広範囲のデジタルビデオ用途、例えば、放送デジタルTV、インターネット及びモバイルネットワーク上のビデオ伝送、ビデオチャットやビデオ会議などの実時間の対話アプリケーション、DVD及びブルーレイディスク、ビデオコンテンツ取得及び編集システム、並びにセキュリティ用途のカムコーダ、において使用されている。
【0003】
1990年のH.261標準規格におけるブロックベースのハイブリッドビデオコーディングアプローチの開発以来、新しいビデオコーディング技術及びツールが開発され、新しいビデオコーディング標準規格の基礎を形成した。更なるビデオコーディング標準規格には、MPEG-1ビデオ、MPEG-2ビデオ、ITU-T H.262/MPEG-2、ITU-T H.263、ITU-T H.264/MPEG-4 パート10 アドバンスト・ビデオ・コーディング(Advanced Video Coding,AVC)、ITU-T H.265/高効率ビデオコーディング(High Efficiency Video Coding,HEVC)、及び拡張、例えば、これらの標準規格のスケーラビリティ及び/又は3D(three-dimensional)拡張がある。ビデオ作成及び使用がより偏在的になるにつれて、ビデオトラフィックは、通信ネットワーク及びデータ記憶に対する最大の負荷である。従って、ビデオコーディング標準規格の大部分の目標の1つは、画像品質を犠牲にせずにその前身と比較してビットレート低減を達成することであった。最新の高効率ビデオコーディング(High Efficiency Video Coding,HEVC)は、画像品質を犠牲にせずにAVCの約2倍ビデオを圧縮することができるが、HEVCと比較してビデオを更に圧縮する新しい技術が更に渇望されている。
【発明の概要】
【0004】
本発明の実施形態は、コーディング効率を改善しかつユーザ要求を満足するように、動きベクトル予測方法及び関連する装置を提供する。
【0005】
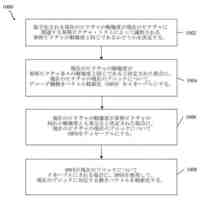
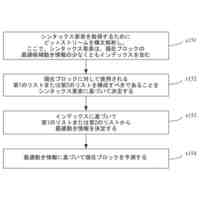
第1の態様に従って、本発明の実施形態は、動きベクトル予測方法を提供する。方法は、復号器側又は符号器側の視点から記載される。方法は、処理されるべき画像ブロックを予測するために使用されてよい。処理されるべき画像ブロックは、ビデオ画像を分割することによって取得される。符号器側で、処理されるべき画像ブロックは、現在のアフィンコーディングブロックであり、処理されるべき画像ブロックに空間的に近接する復号された画像ブロックは、隣接アフィンコーディングブロックである。復号器側で、処理されるべき画像ブロックは、現在のアフィン復号化ブロックであり、処理されるべき画像ブロックに空間的に近接する復号された画像ブロックは、隣接アフィン復号化ブロックである。記載を簡単にするために、処理されるべき画像ブロックは、現在のブロックと呼ばれてよく、処理されるべき画像ブロックに空間的に近接する参照ブロックは、隣接ブロックと呼ばれてよい。方法は、候補動きベクトルリストのインデックス値を取得するようビットストリームをパースすることと、現在のブロックのK個の制御点の候補動きベクトルを含む候補動きベクトルリストを構成することであり、K個の制御点の候補動きベクトルは、現在のブロックの隣接ブロックに使用されている2×Nパラメータアフィン変換モデルに基づいて取得され、2×Nパラメータアフィン変換モデルは、隣接ブロックのN個の制御点の動きベクトルに基づいて取得され、Nは2以上4以下の整数であり、Kは2以上4以下の整数であり、NはKと等しくないことと、候補動きベクトルリストの中で、インデックス値に基づいてK個の制御点の対象候補動きベクトルを決定することと、K個の制御点の対象候補動きベクトルに基づいて現在のブロックの各サブブロックの位置に対応する予測動きベクトルを取得することとを含む。様々なサブブロックの位置に対応する予測動きベクトルは夫々、複数のサブブロックの動き補償のために使用されてよい。
【0006】
本発明のこの実施形態において、現在のブロックを予測する過程で、復号器側は、現在のブロックの候補リストを構成するフェーズで(例えば、アフィン変換モデルに基づくAMVPモード又はマージモードのための候補動きベクトルリストを構成するフェーズで)、隣接ブロックのアフィン変換モデルを使用することによって現在のブロックのアフィン変換モデルを構成することができる、ことが分かる。2つのブロックのアフィン変換モデルは、異なってよい。現在のブロックのアフィン変換モデルは、現在のブロックの実際の動き状態/実際の要件をより良く満足する。従って、この解決法は、現在のブロックを予測する際のコーディング効率及び精度を改善し、かつ、ユーザ要求を満足することができる。
【0007】
第1の態様に従って、可能な実施において、現在のブロックの1つ以上の前もってセットされた空間的に隣接するブロックの利用可能性は、前もってセットされた順序で決定されてよく、次いで、前もってセットされた順序にある利用可能な隣接ブロックは、順次に取得される。前もってセットされた利用可能な隣接ブロックは、処理されるべき画像ブロックの上、左、右上、左下、又は左上に位置する隣接画像ブロックを含んでよい。例えば、左に位置する隣接画像ブロック、上に位置する隣接画像ブロック、右上に位置する隣接画像ブロック、左下に位置する隣接画像ブロック、及び左上に位置する隣接画像ブロックは、順次に利用可能性を確認される。
【0008】
第1の態様に従って、可能な実施において、N=2かつK=3である。具体的に言えば、4パラメータアフィン変換モデルがアフィン復号化ブロック(符号器側ではアフィンコーディングブロック)に使用され、6パラメータアフィン変換モデルが現在のブロックに使用される場合に、現在のブロックの3つの制御点の候補動きベクトルは、現在のブロックの隣接ブロックに使用されている4パラメータアフィン変換モデルに基づいて取得される。
【0009】
例えば、現在のブロックの3つの制御点の候補動きベクトルは、現在のブロックの左上サンプル位置(又は左上角と呼ばれる、以下同じ)(x0,y0)での動きベクトル(vx0,vy0)と、現在のブロックの右上サンプル位置(又は右上角と呼ばれる、以下同じ)(x1,y1)での動きベクトル(vx1,vy1)と、現在のブロックの左下サンプル位置(又は左下角と呼ばれる、以下同じ)(x2,y2)での動きベクトル(vx2,vy2)とを含む。
【0010】
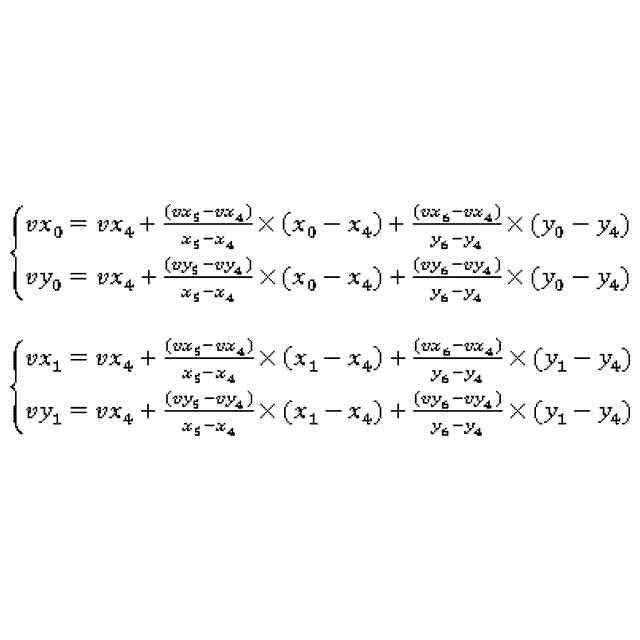
現在のブロックの3つの制御点の候補動きベクトルが、現在のブロックの隣接ブロックに使用されている4パラメータアフィン変換モデルに基づいて取得されることは、現在のブロックの左上角(x0,y0)での動きベクトル(vx0,vy0)と、現在のブロックの右上角(x1,y1)での動きベクトル(vx1,vy1)と、現在のブロックの左下角(x2,y2)での動きベクトル(vx2,vy2)とが、最初に、次の式:
TIFF
2025060730000002.tif
98
162
に従って計算されることを含み、
vx
0
は、現在のブロックの左上サンプル位置に対応する動きベクトルの水平成分であり、vy
0
は、現在のブロックの左上サンプル位置に対応する動きベクトルの垂直成分であり、vx
1
は、現在のブロックの右上サンプル位置に対応する動きベクトルの水平成分であり、vy
1
は、現在のブロックの右上サンプル位置に対応する動きベクトルの垂直成分であり、vx
2
は、現在のブロックの左下サンプル位置に対応する動きベクトルの水平成分であり、vy
2
は、現在のブロックの左下サンプル位置に対応する動きベクトルの垂直成分であり、vx
4
は、隣接ブロックの左上サンプル位置に対応する動きベクトルの水平成分であり、vy
4
は、隣接ブロックの左上サンプル位置に対応する動きベクトルの垂直成分であり、vx
5
は、隣接ブロックの右上サンプル位置に対応する動きベクトルの水平成分であり、vy
5
は、隣接ブロックの右上サンプル位置に対応する動きベクトルの垂直成分であり、x
0
は、現在のブロックの左上サンプル位置の水平座標であり、y
0
は、現在のブロックの左上サンプル位置の垂直座標であり、x
1
は、現在のブロックの右上サンプル位置の水平座標であり、y
1
は、現在のブロックの右上サンプル位置の垂直座標であり、x
4
は、隣接ブロックの左上サンプル位置の水平座標であり、y
4
は、隣接ブロックの左上サンプル位置の垂直座標であり、x
5
は、隣接ブロックの右上サンプル位置の水平座標であり、y
5
は、隣接ブロックの右上サンプル位置の垂直座標である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
華為技術有限公司
マルチリンク再構成方法および装置
12日前
華為技術有限公司
短距離通信方法、装置、及びシステム
17日前
華為技術有限公司
マルチリンク確立方法および通信装置
17日前
華為技術有限公司
エンコーダ、デコーダ及び対応する方法
17日前
華為技術有限公司
通信方法、通信装置および通信システム
17日前
華為技術有限公司
動きベクトル予測方法及び関連する装置
17日前
華為技術有限公司
エンコーダ、デコーダ、及び対応する方法
12日前
華為技術有限公司
スケーラブルな符号化及び復号方法及び装置
4日前
華為技術有限公司
表示画面、表示画面保護膜、および電子デバイス
17日前
華為技術有限公司
信号トランシーバー装置、給電構造、及びアンテナ
12日前
華為技術有限公司
時間リソース割り当て及び受信方法、並びに関連装置
12日前
華為技術有限公司
電子デバイスに適用される制御方法及び電子デバイス
17日前
華為技術有限公司
ビデオエンコーダ、ビデオデコーダ、及び対応する方法
12日前
華為技術有限公司
動きベクトル予測方法および装置、エンコーダ、ならびにデコーダ
17日前
華為技術有限公司
無線フレーム送信方法及び装置並びに無線フレーム受信方法及び装置
12日前
華為技術有限公司
データ伝送方法、通信装置、コンピュータ可読記憶媒体、およびチップ
17日前
華為技術有限公司
ワイヤレス通信ネットワーク内のセンシングシステム、方法、および装置
1か月前
華為技術有限公司
指定されたレイヤのためのスケーラブル・ネスティングSEIメッセージ
17日前
華為技術有限公司
巡回シフトダイバーシティシーケンスを選択するための方法及び関連装置
17日前
華為技術有限公司
クロマサブブロックのアフィンベースのインター予測のための方法及び装置
17日前
華為技術有限公司
クロマ量子化パラメータのマッピング関数のシグナリングのための方法及び装置
12日前
個人
音声による制御装置
1か月前
個人
防犯AIプラグイン
23日前
個人
コメント配信システム
1か月前
個人
電気音響変換装置
1か月前
個人
テレビ会議拡張システム
18日前
株式会社SEtech
撮像装置
1か月前
日本放送協会
無線通信装置
23日前
キヤノン株式会社
撮像装置
1か月前
TOA株式会社
音響システム
19日前
キヤノン電子株式会社
画像処理装置
1か月前
キヤノン電子株式会社
画像読取装置
13日前
キヤノン電子株式会社
画像処理装置
24日前
キヤノン電子株式会社
画像処理装置
1か月前
個人
無線中継赤外線コピーリモコン
20日前
キヤノン株式会社
画像読取装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ