TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025057129
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023166804
出願日
2023-09-28
発明の名称
無人航空機の経路設定方法
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G08G
5/00 20250101AFI20250402BHJP(信号)
要約
【課題】飛行経路について画像データを取得していなくても、GNSSからの電波の取得が途絶えた後の飛行を継続できるUAVの経路設定方法を提供すること。
【解決手段】無人航空機の飛行経路設定方法は、
自律飛行する無人航空機の予定経路のいずれかの地点において、衛星測位システムを構成する人工衛星と無人航空機との位置関係に基づいて、無人航空機における人工衛星の捕捉状態を算出する第1ステップと、
第1ステップで算出された捕捉状態と、無人航空機の飛行制御に必要な基準捕捉状態とを比較する第2ステップと、を備える。
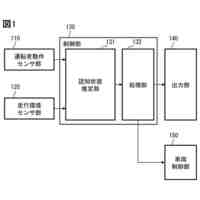
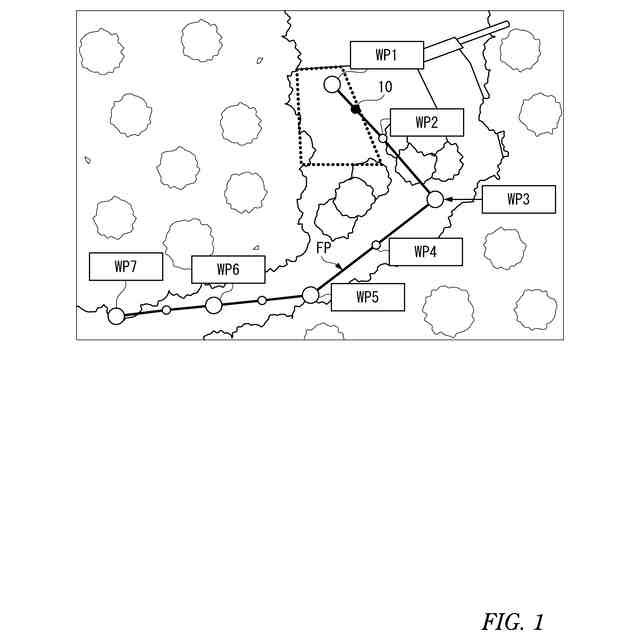
【選択図】図1
特許請求の範囲
【請求項1】
自律飛行する無人航空機の予定経路のいずれかの地点において、衛星測位システムを構成する人工衛星と前記無人航空機との位置関係に基づいて、前記無人航空機における前記人工衛星の捕捉状態を算出する第1ステップと、
前記第1ステップで算出された前記捕捉状態と、前記無人航空機の飛行制御に必要な基準捕捉状態とを比較する第2ステップと、を備える、飛行経路設定方法。
続きを表示(約 1,200 文字)
【請求項2】
前記第1ステップにおいて、
いずれかの前記地点における仰角θを算出する第1-1ステップと、
前記第1-1ステップにおいて算出された前記仰角θに基づいて、位置を算出するのに必要な情報を前記衛星測位システムから取得できる前記人工衛星の捕捉数nを算出する第1-2ステップと、
前記第2ステップにおいて、
算出される前記捕捉数nと飛行制御に必要な基準衛星捕捉数Nとを比較する、
請求項1に記載の飛行経路設定方法。
【請求項3】
前記第2ステップの前記比較において、
前記捕捉数nが前記基準衛星捕捉数Nに達していなければ、
前記無人航空機の鉛直方向の位置および水平方向の位置の一方または双方を変える補正位置を算出し、
前記補正位置について、前記第1-1ステップ、前記第1-2ステップおよび前記第2ステップを実行する、
請求項2に記載の飛行経路設定方法。
【請求項4】
前記補正位置について、前記第1-1ステップ、前記第1-2ステップおよび前記第2ステップを実行し、
前記捕捉数nが前記基準衛星捕捉数Nに達していれば、前記補正位置を前記予定経路に組み入れる、
請求項3に記載の飛行経路設定方法。
【請求項5】
前記第2ステップの前記比較において、
前記捕捉数nが前記基準衛星捕捉数Nに達していれば、前記予定経路を遵守する、
請求項2に記載の飛行経路設定方法。
【請求項6】
前記第1-1ステップにおいて、
前記地点における最大仰角θmaxを算出し、
前記第1-2ステップにおいて、
前記最大仰角θmaxに基づいて前記捕捉数nを算出する、
請求項2に記載の飛行経路設定方法。
【請求項7】
前記予定経路の設定の際に前記第1ステップおよび前記第2ステップを実行する、
請求項1に記載の飛行経路設定方法。
【請求項8】
前記予定経路における所定間隔を隔てた複数の前記地点について、または、
前記予定経路における複数のウェイポイントについて、前記第1ステップおよび前記第2ステップを実行する、
請求項7に記載の飛行経路設定方法。
【請求項9】
設定された前記予定経路にしたがって前記無人航空機が自律飛行している際に前記第1ステップおよび前記第2ステップを実行する、
請求項1に記載の飛行経路設定方法。
【請求項10】
前記第1ステップにおいて、
いずれかの前記地点における測位精度劣化係数dを算出し、
前記第2ステップにおいて、
算出される前記測位精度劣化係数dと飛行制御に必要な基準測位精度劣化係数Dとを比較する、
請求項1に記載の飛行経路設定方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、無人航空機(Unmanned Aerial Vehicle:UAV)の飛行時における経路設定方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
UAVの自律飛行時においては,衛星測位システム(Global Navigation Satellite System:GNSS)からの位置情報に関する電波を取得し自機の位置を確認しながら予定飛行経路を飛行する。GNSSからの電波の取得が途絶えた場合、操縦者によるマニュアル操縦に切り替えるか、もしくは、UAVに予めfail-Safeの機能としてプログラミングされている安全地帯への着陸を実施する必要がある。
【0003】
操縦者によるマニュアル操縦の場合、UAVを目視するか、または、UAVに搭載されたカメラの画像を参照して、UAVを操縦する必要がある。
また、後者のプログラミングについても、GNSSが使えないため、自機の位置を確認することができない。したがって、搭載したカメラの映像から人工知能(Artificial Intelligence:AI)による画像認識等を用いて安全地帯に着陸するか、または、パラシュートを展開し不時着させる等の追加装備の必要性がある。しかし、必ずしも安全が担保されるものではない。
【0004】
特許文献1は、GNSSの一例であるGPS(Global Positioning System:全地球測位システム)からの電波の取得が途絶えた場合であっても、撮影する画像に基づきその位置と姿勢角を補正して、特定地域上空の画像を取得する画像処理装置を開示する。特許文献1は、UAVに搭載されている画像取得手段を用いて、移動中に取得した画像の画像データベースを作成し、GPSのリンクが途絶した場合に画像データベースを参照する。そして、画像データベース中の画像と現在の画像の相関値を計算し、相関の高い画像を参照値として座標変換を施し無人機の位置・姿勢角の誤差推定値を計算する。得られた位置・姿勢角の誤差推定値をGPS/INS(Global Positioning System/Inertial Navigation System)計算に入力し、位置・姿勢角を検出する。
【先行技術文献】
【特許文献】
【0005】
特開2008-304260号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1によればGPSからの電波の取得が途絶えた以降もUAVの飛行を継続できる。しかし、特許文献1のUAVは特定地域上空を複数回飛行することを前提としており、予め飛行経路について画像データを取得しておく必要がある。つまり、特許文献1の提案は、目的地までの飛行が初めてであったり、目的地までの飛行経路が初めてであったりする場合には対応することができない。
以上より、本開示は、飛行経路について画像データを取得していなくても、GNSSからの電波の取得を途絶えさせることなく飛行を継続できるUAVの経路設定方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示に係る無人航空機の飛行経路設定方法は、
自律飛行する無人航空機の予定経路のいずれかの地点において、衛星測位システムを構成する人工衛星と無人航空機との位置関係に基づいて、無人航空機における人工衛星の捕捉状態を算出する第1ステップと、
第1ステップで算出された捕捉状態と、無人航空機の飛行制御に必要な基準捕捉状態とを比較する第2ステップと、を備える、
【発明の効果】
【0008】
本開示によれば、飛行経路について画像データを取得していなくても、GNSSからの電波の取得を途絶えさせることなく飛行を継続できるUAVの経路設定方法が提供される。
【図面の簡単な説明】
【0009】
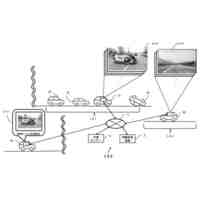
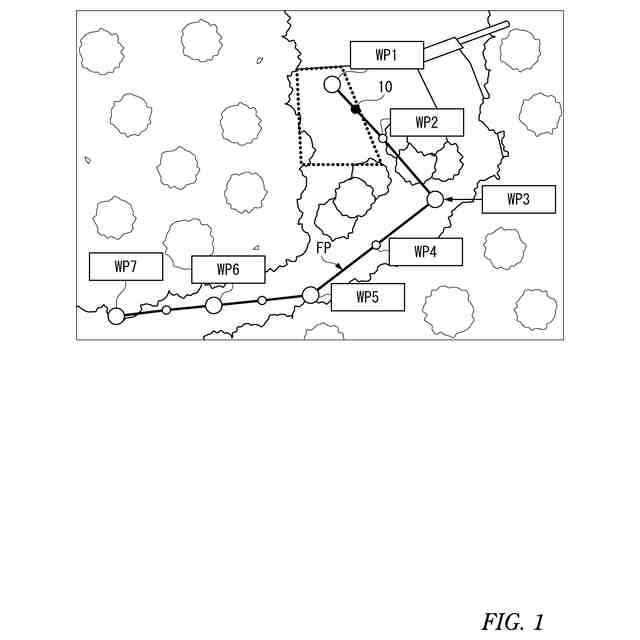
実施形態において設定される飛行経路の一例を示す図である。
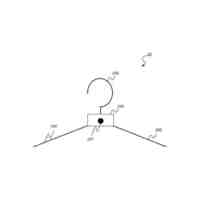
最大仰角θmaxおよび補正を説明する図である。
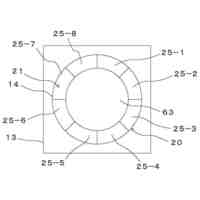
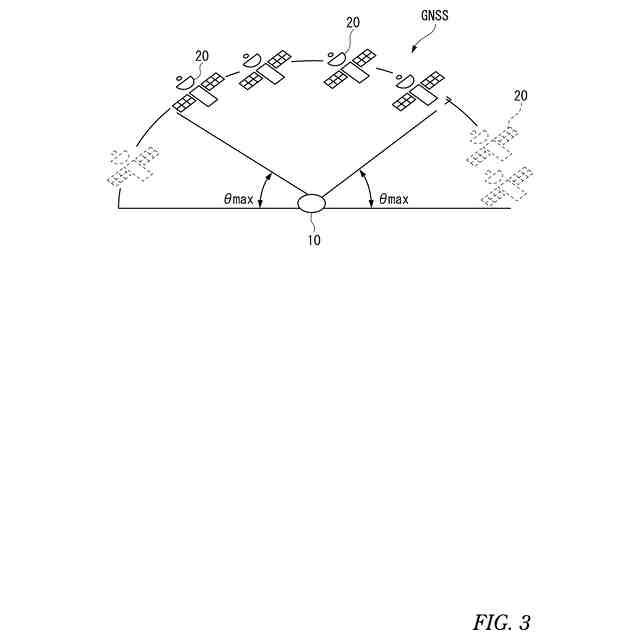
最大仰角θmaxと電波を受信可能な衛星の関係を示す図である。
複数のウェイポイントと飛行制御に足りる衛星捕捉数が得られる最低高度の関係を示すグラフである。
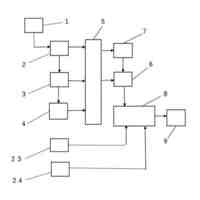
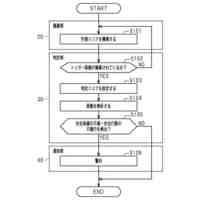
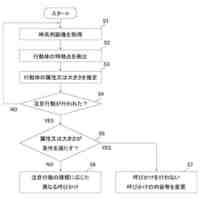
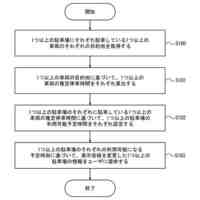
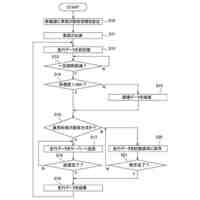
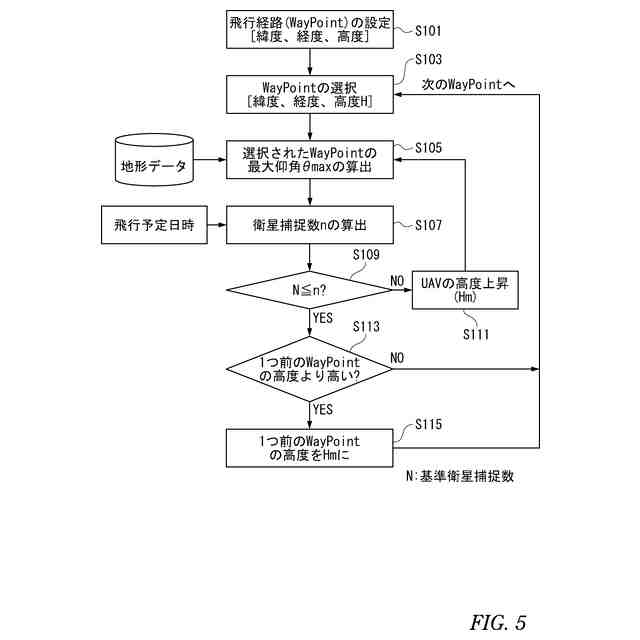
実施形態における制御手順を示すフロー図である。
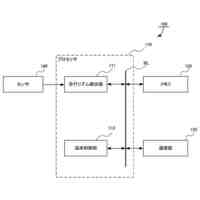
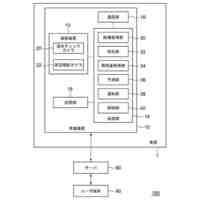
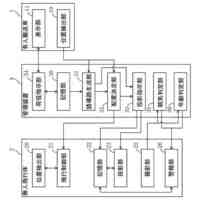
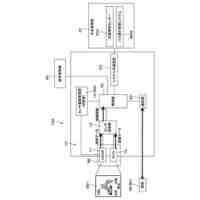
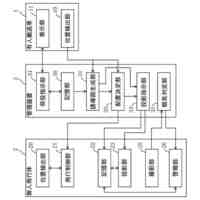
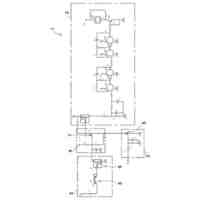
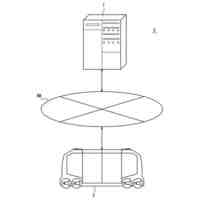
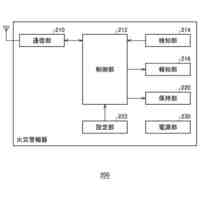
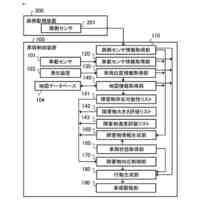
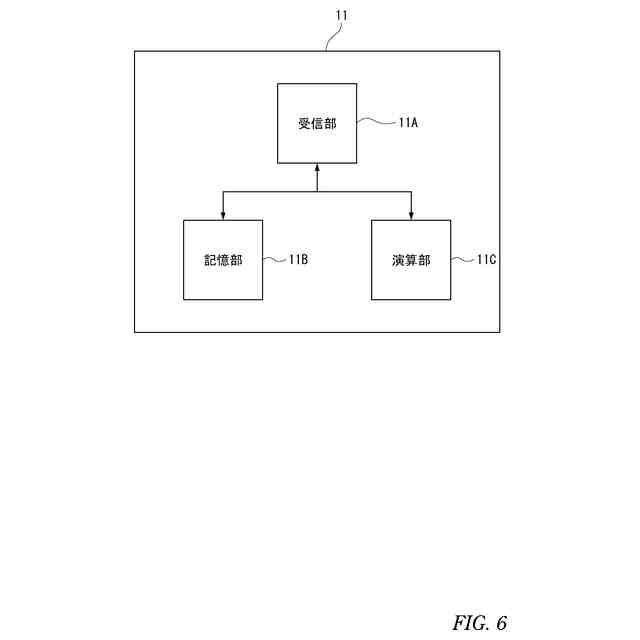
実施形態における制御手順を実行するための制御部の構成例を示す図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照しながら、実施形態について説明する。
本実施形態は、UAV10が自律飛行する前に飛行経路を設定する際に、GNSSを構成する複数の衛星を捕捉する数(衛星捕捉数)nがUAV10の飛行制御に必要な基準衛星捕捉数Nに達しているか否かを判定する。本実施形態において、衛星捕捉数nはUAV10の周囲の環境に対する仰角θに基づいて算出される。本実施形態は、この判定結果は飛行経路を決定する際に反映される。なお、ここでは衛星捕捉数nについて判定を行う例を説明するが、後述するように、測位精度の指標であるDOP(Dilution Of Precision)を衛星捕捉数nの代替または衛星捕捉数nとともに判定の対象にすることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
7日前
個人
自動車ケアフル灯
4日前
個人
忘れ物検出装置
28日前
個人
出会い頭事故防止装置
25日前
能美防災株式会社
発信機
7日前
日本信号株式会社
情報管理システム
25日前
株式会社島津製作所
警報装置
1か月前
ホーチキ株式会社
監視システム
13日前
タック株式会社
安全監視システム
11日前
株式会社SUBARU
車速制御システム
28日前
株式会社JVCケンウッド
通知システム
11日前
三菱ロジスネクスト株式会社
搬送システム
7日前
三菱ロジスネクスト株式会社
搬送システム
7日前
日本信号株式会社
路側装置及びセンサ装置
14日前
三菱ロジスネクスト株式会社
搬送システム
7日前
株式会社アジラ
注目行動呼びかけシステム
6日前
三菱ロジスネクスト株式会社
搬送システム
7日前
株式会社デンソー
運転支援装置
19日前
河村電器産業株式会社
警報装置
27日前
トヨタ自動車株式会社
方法
18日前
株式会社 ミックウェア
情報処理装置、情報処理方法
25日前
トヨタ自動車株式会社
車両
6日前
株式会社知財事業研究所
運行計画作成システム
1か月前
矢崎総業株式会社
路面監視装置
5日前
愛知時計電機株式会社
生活データ集計装置
5日前
パナソニックIPマネジメント株式会社
火災警報器
5日前
エムケー精工株式会社
信号機および信号機の発光制御方法
19日前
本田技研工業株式会社
運転支援システム
1か月前
三菱電機株式会社
車両制御装置
22日前
能美防災株式会社
音響装置及びその設置構造
29日前
トヨタ自動車株式会社
自動運転車両
1か月前
トヨタ自動車株式会社
異常判定装置
1か月前
三菱電機株式会社
車両システム
1か月前
個人
除排雪判断支援システムおよびプログラム、道路管理方法
11日前
トヨタ自動車株式会社
情報処理装置
13日前
トヨタ自動車株式会社
情報処理装置
13日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ