TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025054873
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023164066
出願日
2023-09-26
発明の名称
工具システム、工具、締付箇所推定方法及びプログラム
出願人
パナソニックIPマネジメント株式会社
代理人
弁理士法人北斗特許事務所
主分類
B25B
23/14 20060101AFI20250331BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】撮像画像から次に締め付けられる締付箇所を精度良く推定できる工具システムを提供する。
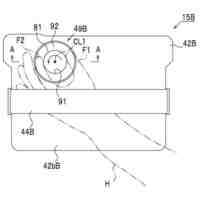
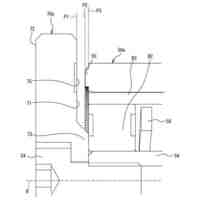
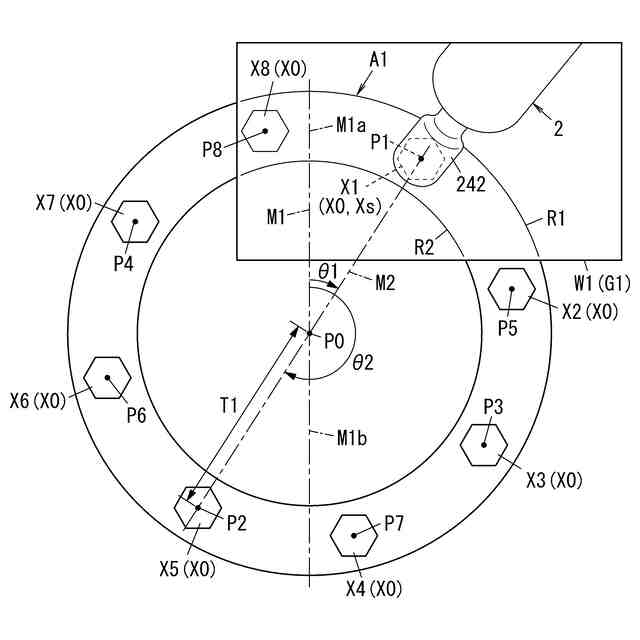
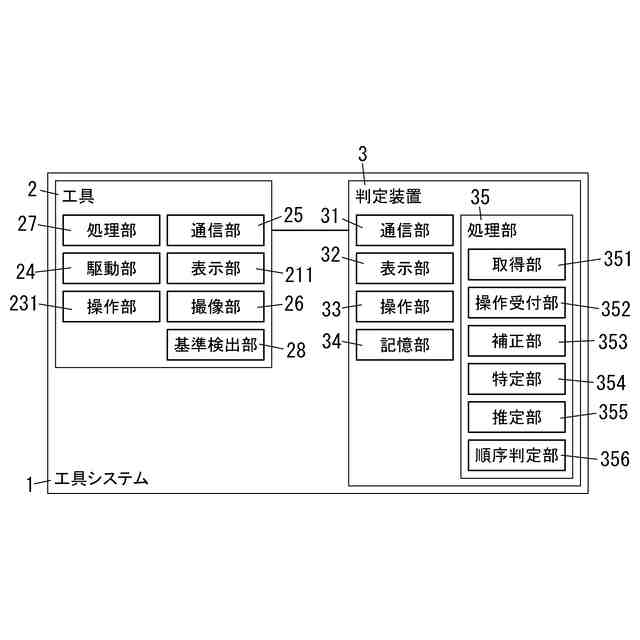
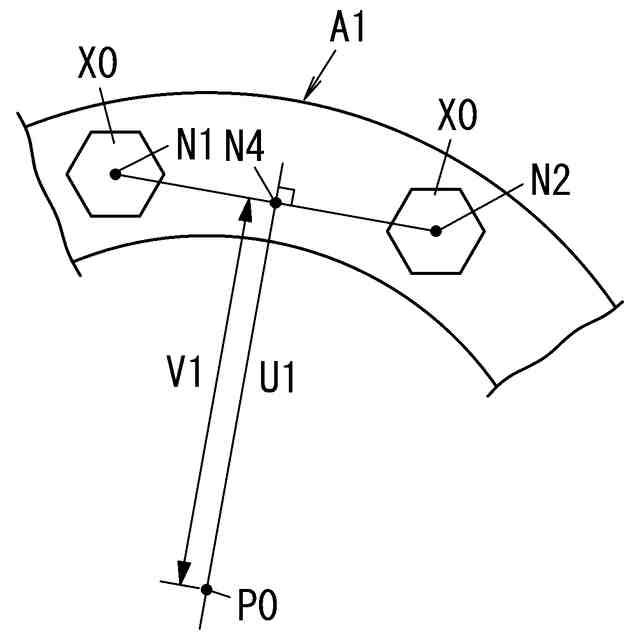
【解決手段】工具システムは、工具2を備える。工具2は、駆動部、撮像部及び基準検出部を有する。駆動部は、先端工具242を駆動する。基準検出部は、基準方向を検出する。先端工具242は、作業対象物A1の複数の締付箇所X0に配置された締付部品を締め付けることが可能である。撮像部は、先端工具242がセットされたセット締付箇所Xsを撮像範囲W1内に含むように配置される。工具システムは、推定部を備える。推定部は、撮像画像G1に設定された第1直線M1と第2直線M2とが成す角度θ1を用いて、セット締付箇所Xsの次に締め付けられる締付箇所X5を推定する。第1直線M1は、基準方向に基づいて撮像画像G1に設定されている。第2直線M2は、締付箇所X1の位置座標P1と、作業対象物A1の中心座標P0とを通る直線である。
【選択図】図3
特許請求の範囲
【請求項1】
先端工具を駆動する駆動部と、撮像画像を生成する撮像部と、基準方向を検出する基準検出部とを有する可搬型の工具を備える工具システムであって、
前記先端工具は、作業対象物が有する複数の締付箇所に配置された締付部品を締め付けることが可能であり、
前記撮像部は、前記複数の締付箇所のうち前記先端工具がセットされたセット締付箇所を撮像範囲内に含むように配置されており、
前記撮像画像に設定された第1直線と第2直線とが成す角度を用いて、前記セット締付箇所の次に締め付けられる締付箇所を推定する推定部を更に備え、
前記第1直線は、前記基準検出部によって検出された前記基準方向に基づいて前記撮像画像に設定されており、
前記第2直線は、前記撮像画像に含まれる前記セット締付箇所の位置座標と、前記撮像画像に写った前記作業対象物の中心座標とを通る直線である、
工具システム。
続きを表示(約 1,100 文字)
【請求項2】
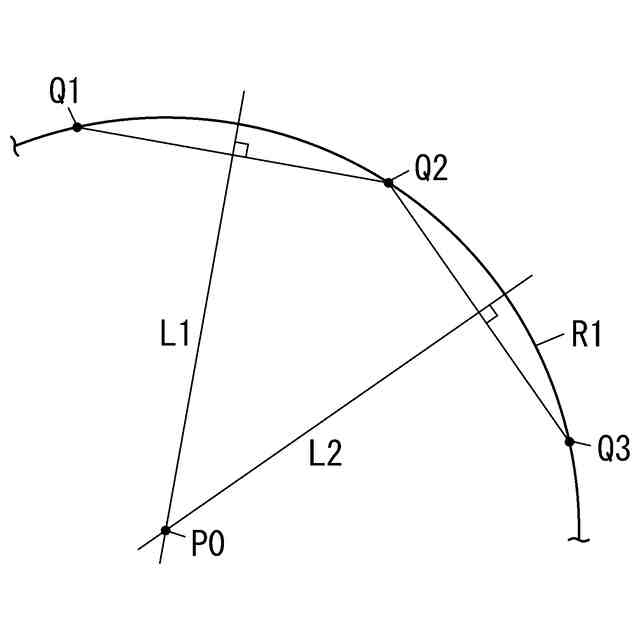
前記推定部は、前記撮像画像に写った前記作業対象物の輪郭を検出し、検出した前記輪郭に基づいて前記作業対象物の前記中心座標を推定する、
請求項1記載の工具システム。
【請求項3】
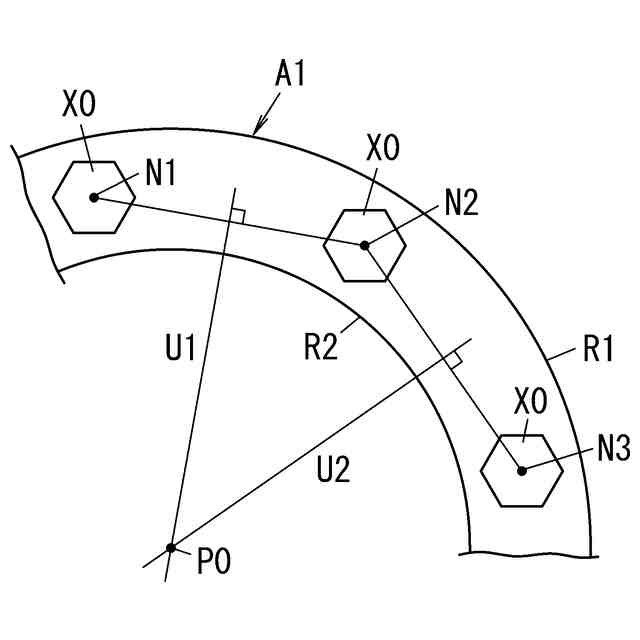
前記推定部は、前記複数の締付箇所のうち、前記撮像画像に含まれる所定数の締付箇所の各々の位置座標を求め、求めた前記位置座標に基づいて前記作業対象物の前記中心座標を推定する、
請求項1記載の工具システム。
【請求項4】
前記撮像画像の歪みを補正する補正部を更に備え、
前記推定部は、前記補正部によって補正された前記撮像画像に基づいて前記中心座標を求める、
請求項1~3のいずれか1項に記載の工具システム。
【請求項5】
前記複数の締付箇所の個数に関する個数情報を入力する入力部を更に備え、
前記推定部は、前記個数情報を用いて、N(N:3以上の整数)番目に締め付けられる第N締付箇所を推定する、
請求項1~3のいずれか1項に記載の工具システム。
【請求項6】
前記入力部に入力された前記個数情報を記憶する記憶部を更に備える、
請求項5に記載の工具システム。
【請求項7】
前記作業対象物は、フランジであり、
前記複数の締付箇所は、複数のボルト締付箇所である、
請求項1~3のいずれか1項に記載の工具システム。
【請求項8】
請求項1~3のいずれか1項に記載の工具システムで用いられる工具であって、
前記駆動部と、前記撮像部と、前記基準検出部とを備える、
工具。
【請求項9】
先端工具を駆動する駆動部と、撮像画像を生成する撮像部と、基準方向を検出する基準検出部とを有する可搬型の工具を用いた締付箇所推定方法であって、
前記先端工具は、作業対象物が有する複数の締付箇所に配置された締付部品を締め付けることが可能であり、
前記撮像部は、前記複数の締付箇所のうち前記先端工具がセットされたセット締付箇所を撮像範囲内に含むように配置されており、
前記撮像画像に設定された第1直線と第2直線とが成す角度を用いて、前記セット締付箇所の次に締め付けられる締付箇所を推定する推定ステップを有し、
前記第1直線は、前記基準検出部によって検出された前記基準方向に基づいて前記撮像画像に設定されており、
前記第2直線は、前記撮像画像に含まれる前記セット締付箇所の位置座標と、前記撮像画像に写った前記作業対象物の中心座標とを通る直線である、
締付箇所推定方法。
【請求項10】
請求項9の締付箇所推定方法を1以上のプロセッサに実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、一般に工具システム、工具、締付箇所推定方法及びプログラムに関し、より詳細には、可搬型の工具を備える工具システム、工具、締付箇所推定方法及びプログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
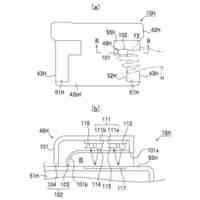
特許文献1に記載の工具システムは、可搬型の工具を備える。工具は、撮像部と姿勢検知部と制御部とを備える。撮像部は、工具に取り付けられたソケット(先端工具)が撮像範囲に含まれるように配置されている。撮像部は、工具を用いた作業時にソケットがセットされた作業対象(作業対象物)を撮像する。姿勢検知部は、加速度センサ及びジャイロセンサ等を含み、工具の姿勢を検出する。制御部は、姿勢検知部によって検知された工具の姿勢に基づいて撮像部によって生成された撮像画像に写る作業対象を特定する。また、制御部は、特定された作業対象が、予め設定された作業順番と一致しない場合、工具の動作を停止させる。
【先行技術文献】
【特許文献】
【0003】
特開2021-074812号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の工具システムは、例えば、作業対象がフランジの場合、フランジに設けられた複数の締付箇所に配置された締付部品を、予め設定された作業順序に従って締め付ける場合に用いられる。このような場合に対して、AI(人工知能)学習の技術を用いて、工具のソケットがセットされたセット締付箇所及びフランジの一部が写った撮像画像から、次に締め付けられる締付箇所を推定する技術が提案されている。
【0005】
このようなAI学習を用いる場合、学習段階で用いる画像と、予測段階で用いる画像(撮像画像)との間において、画像上でのセット締付箇所とフランジとの位置関係が同一であることが前提である。
【0006】
このため、例えばフランジが一定角度回転してセット締付箇所の配置が変化することで、予測段階で用いる画像に写った上記の位置関係が、学習段階で用いた画像に写った上記の位置関係と比べて変化すると、撮像画像から、次に締め付けられる締付箇所を精度良く推定できなくなる。この場合、推定精度を向上させるために、再学習を行う必要があり、手間が掛かる。
【0007】
本開示は上記事由に鑑みてなされており、撮像画像において先端工具がセットされたセット締付箇所と作業対象物との位置関係が変化しても、撮像画像から次に締め付けられる締付箇所を精度良く推定できる工具システム、工具、締付箇所推定方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
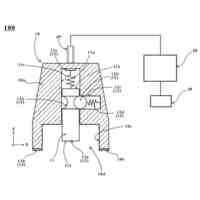
本開示の一態様に係る工具システムは、可搬型の工具を備える工具システムである。前記工具は、駆動部と、撮像部と、基準検出部とを有する。前記駆動部は、先端工具を駆動する。前記撮像部は、撮像画像を生成する。前記基準検出部は、基準方向を検出する。前記先端工具は、作業対象物が有する複数の締付箇所に配置された締付部品を締め付けることが可能である。前記撮像部は、前記複数の締付箇所のうち前記先端工具がセットされたセット締付箇所を撮像範囲内に含むように配置されている。前記工具システムは、推定部を更に備える。前記推定部は、前記撮像画像に設定された第1直線と第2直線とが成す角度を用いて、前記セット締付箇所の次に締め付けられる締付箇所を推定する。前記第1直線は、前記基準検出部によって検出された前記基準方向に基づいて前記撮像画像に設定されている。前記第2直線は、前記撮像画像に含まれる前記セット締付箇所の位置座標と、前記撮像画像に写った前記作業対象物の中心座標とを通る直線である。
【0009】
本開示の一態様に係る工具は、前記工具システムで用いられる工具である。前記工具は、前記駆動部と、前記撮像部と、前記基準検出部とを備える。
【0010】
本開示の一態様に係る締付箇所推定方法は、可搬型の工具を用いた締付箇所推定方法である。前記工具は、駆動部と、撮像部と、基準検出部とを有する。前記駆動部は、先端工具を駆動する。前記撮像部は、撮像画像を生成する。前記基準検出部は、基準方向を検出する。前記先端工具は、作業対象物が有する複数の締付箇所に配置された締付部品を締め付けることが可能である。前記撮像部は、前記複数の締付箇所のうち前記先端工具がセットされたセット締付箇所を撮像範囲内に含むように配置されている。前記締付箇所推定方法は、推定ステップを有する。前記推定ステップでは、前記撮像画像に設定された第1直線と第2直線とが成す角度を用いて、前記セット締付箇所の次に締め付けられる締付箇所を推定する。前記第1直線は、前記基準検出部によって検出された前記基準方向に基づいて前記撮像画像に設定されている。前記第2直線は、前記撮像画像に含まれる前記セット締付箇所の位置座標と、前記撮像画像に写った前記作業対象物の中心座標とを通る直線である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
2日前
株式会社不二越
ロボット
23日前
株式会社エビス
腰ベルト用連結具
2日前
個人
深孔スリーブ駆動ロッド構造
15日前
株式会社不二越
ロボット操作装置
22日前
川崎重工業株式会社
ロボット
23日前
個人
バール
15日前
工機ホールディングス株式会社
作業機
10日前
株式会社デンソー
操縦桿
23日前
梅馨堂合同会社
人協働ロボットシステム
17日前
ARMA株式会社
UI付エンドエフェクタ
18日前
株式会社デンソーウェーブ
ロボット制御システム
8日前
アピュアン株式会社
エアー式衝撃工具
5日前
株式会社マキタ
作業機
22日前
学校法人法政大学
装着型アシスト装置
12日前
三菱電機株式会社
トルク締め個所検出システム
15日前
株式会社マキタ
インパクト工具
3日前
高丸工業株式会社
ロボット操作システムの動作方法
15日前
株式会社マキタ
インパクト工具
3日前
シブヤパッケージングシステム株式会社
物品移載装置
23日前
中国電力株式会社
電動ドライバー
9日前
株式会社不二越
ロボットの教示システム及び教示方法
9日前
SB C&S株式会社
治具セット
2日前
オムロン株式会社
モバイルロボット
9日前
JUKI株式会社
ハンドリング装置
17日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
5日前
オムロン株式会社
モバイルロボット
9日前
株式会社デンソー
解体装置および解体プログラム
23日前
株式会社デンソー
作業装置および作業プログラム
23日前
株式会社ベッセル工業
インパクト工具
23日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
9日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
9日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
9日前
株式会社SUBARU
ボルトの電動締結工具
18日前
シナノケンシ株式会社
把持装置
9日前
株式会社デンソーウェーブ
ロボット制御システム及び停電監視回路
9日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ