TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025054484
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023163546
出願日
2023-09-26
発明の名称
ロボットシステム及びロボットシステムの位置補正方法
出願人
株式会社デンソーウェーブ
代理人
弁理士法人サトー
主分類
B25J
9/10 20060101AFI20250331BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】支持部材に固定された撮像装置とワークとの位置関係が変化した場合に応じて、ワークの位置を補正できるロボットシステムを提供する。
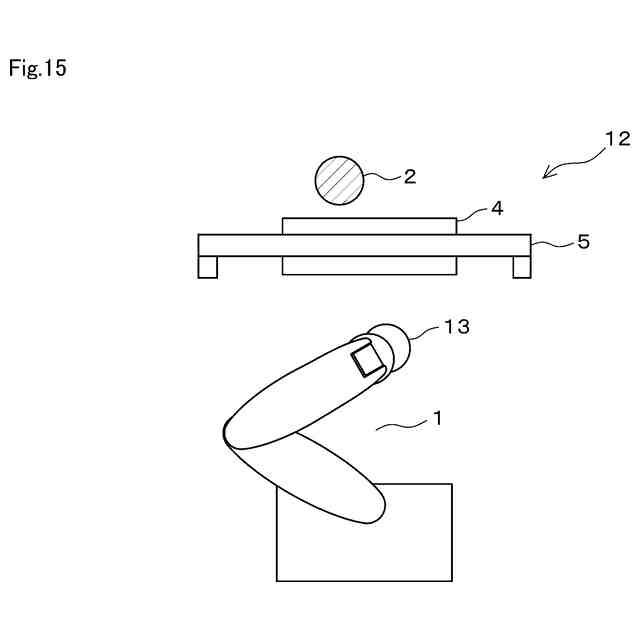
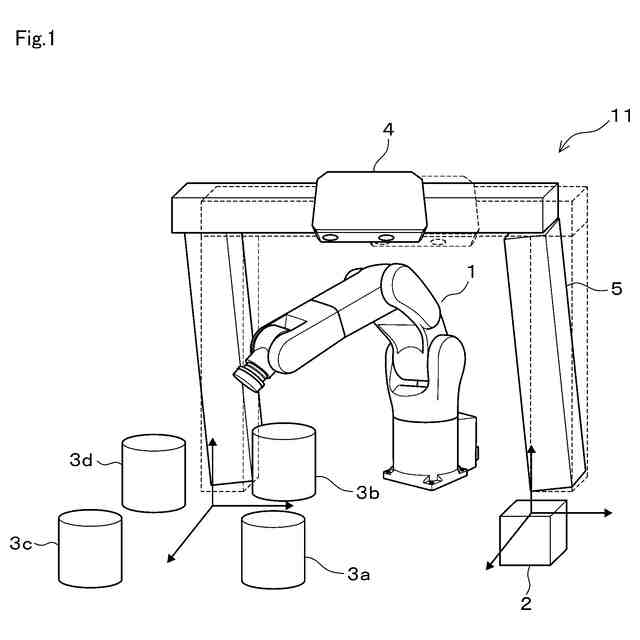
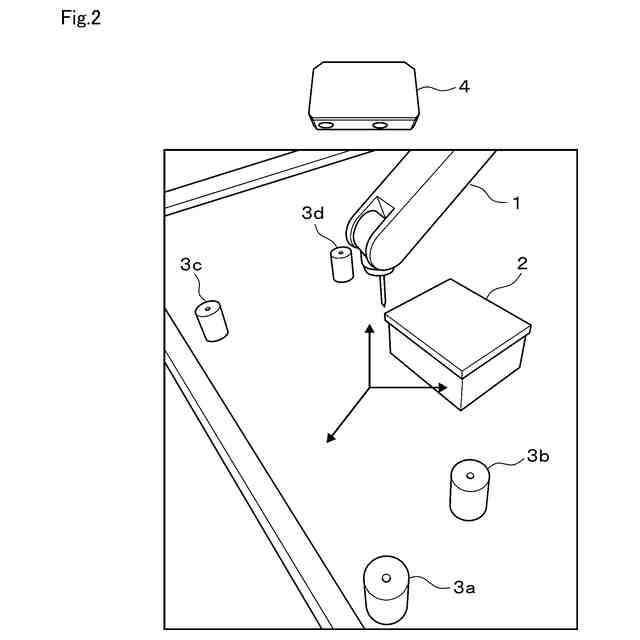
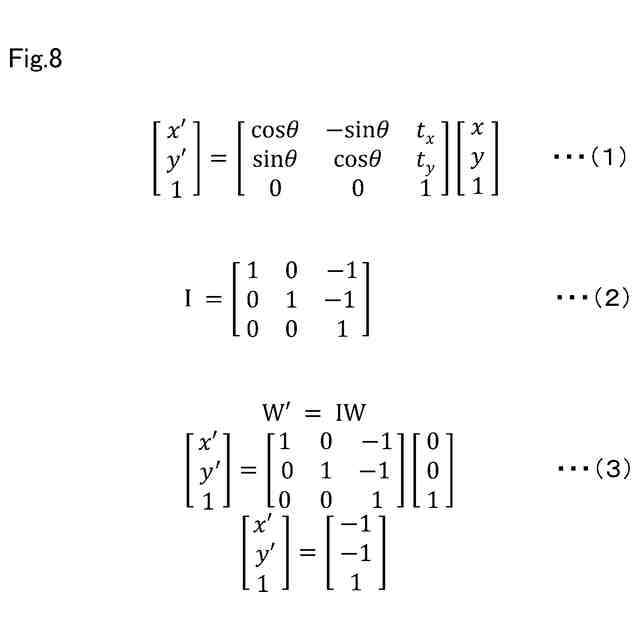
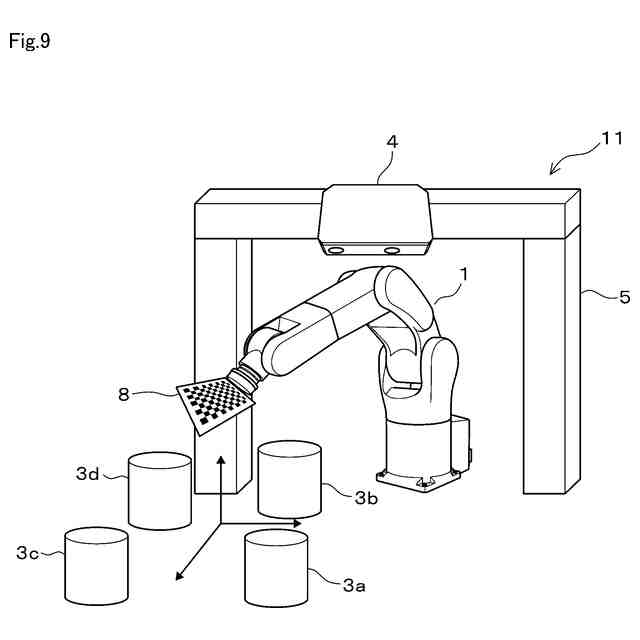
【解決手段】ワーク2の位置決め用のマーカとしてツールを使用する。カメラ4は、支持部材5に固定された状態でワーク2及びツールを捉えた画像を撮像する。カメラコントローラ7は、最初に前記画像より把握されるマスタワーク3に基づく基準位置を、ロボット座標系上の位置に変換し、変換した位置を初期位置として記録させる。また、前記画像より把握されるワーク2の位置をロボット座標系上の位置に変換し、その位置をワーク2の位置とする。カメラコントローラは、初期位置を記録させた以降に設定したワーク2の位置が実際の位置に一致しない状態になると、その時点で画像より把握される基準位置と初期位置とから、現時点のワーク位置座標系から初期位置を記録させた時点の基準座標系におけるワーク位置に変換する式Iを生成し、変換式Iを用いてワーク2の位置を補正する。
【選択図】図15
特許請求の範囲
【請求項1】
ロボットと、
このロボットの作業対象であるワークと、
前記ワークの位置決めに使用するマーカと、
支持部材に固定された状態で、前記マーカ及び前記ワークを捉えた画像を撮像する撮像装置と、
最初に前記画像より把握される前記マーカに基づく基準位置を、前記ロボットの位置を基準とするロボット座標系上の位置に変換し、変換した位置を初期位置として設定させる基準位置設定部と、
前記画像より把握される前記ワークの位置を、前記ロボット座標系上の位置に変換し、変換した位置を前記ワークの位置として設定するワーク位置設定部と、を備え、
前記ロボットのアームの手先に取り付けられるツールを、前記マーカとして使用し、
前記基準位置設定部は、前記初期位置の設定後に、前記ワーク位置設定部により設定される前記ワークの位置が実際のワークの位置に一致しない状態になった場合、前記画像より把握される前記基準位置と前記初期位置との差に基いて、現時点のワーク位置座標系を、前記初期位置を設定した時点の基準座標系におけるワーク位置に変換するための変換式を生成し、
前記ワーク位置設定部は、前記変換式を用いて前記ワークの位置を補正するロボットシステム。
続きを表示(約 1,200 文字)
【請求項2】
前記ロボットは、移動体上に配置されている請求項1記載のロボットシステム。
【請求項3】
前記ロボットの動作を制御する制御装置を備え、
前記基準位置設定部は、前記制御装置を介して、前記ロボットの手先による前記ワークへのアクセスが失敗したことが通知されると、前記変換式を生成する請求項1又は2記載のロボットシステム。
【請求項4】
前記制御装置は、前記ロボットの手先による前記ワークへのアクセスが失敗すると、前記ワークへのアクセスを再実行させて、再実行の回数をカウントするカウンタをインクリメントし、前記ワークへのアクセスが成功すると前記カウンタをリセットし、前記カウンタの値が予め定めた上限値を超えると前記通知を行い、
前記基準位置設定部は、前記通知を受信すると前記変換式を生成する請求項3記載のロボットシステム。
【請求項5】
ロボットと、
このロボットの作業対象であるワークと、
前記ロボットのアームの手先に取り付けられるツールであり、前記ワークの位置決めに使用するマーカと、
支持部材に固定された状態で、前記マーカ及び前記ワークを捉えた画像を撮像する撮像装置と、を備えたロボットシステムにおいて実行されるもので、
最初に前記画像より把握される前記マーカに基づく基準位置を、前記ロボットの位置を基準とするロボット座標系上の位置に変換し、変換した位置を初期位置として設定し、
前記画像より把握される前記ワークの位置を、前記ロボット座標系上の位置に変換し、変換した位置を前記ワークの位置として設定し、
前記初期位置を設定した以降に、設定した前記ワークの位置が実際のワークの位置に一致しない状態になると、前記画像より把握される前記基準位置と前記初期位置との差に基いて、現時点のワーク位置座標系を、前記初期位置を設定した時点の基準座標系におけるワーク位置に変換するための変換式を生成し、
前記変換式を用いて前記ワークの位置を補正するロボットシステムの位置補正方法。
【請求項6】
前記ロボットは、移動体上に配置されている請求項5記載のロボットシステムの位置補正方法。
【請求項7】
前記ロボットの手先による前記ワークへのアクセスが失敗した際に、前記変換式を生成する請求項5又は6記載のロボットシステムの位置補正方法。
【請求項8】
前記ロボットの手先による前記ワークへのアクセスが失敗すると、前記ワークへのアクセスを再実行させて、再実行の回数をカウントするカウント値をインクリメントし、前記ワークへのアクセスが成功すると前記カウント値をリセットし、前記カウント値が予め定めた上限値を超えると、前記変換式を生成する請求項7記載のロボットシステムの位置補正方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、マーカを用いてワークの位置決めを行うロボットシステム、及び当該システムの位置補正方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
例えば、特許文献1には、ロボットの作業対象であるワークの近傍にマーカを配置し、それらを含む画像をカメラにより撮像して、カメラの座標系において捉えたマーカの位置をロボットの位置を基準とする座標系の位置に変換することで、ワーク位置をロボットの座標系で把握して位置決めを行う技術が開示されている。この技術では、基板1上に設けた認識マーク2上方にCCDカメラ4を移動させ、認識マーク2の画像をビジョンコントローラ5に取り込んで、認識マーク2の重心を検出する。その後、CCDカメラ4、X又はY方向へX-Yロボット8により一定距離移動させ、再度認識マーク2の重心検出を行う。そして、得られた2つの重心間のビジョンコントローラ5のメモリ空間内での距離と実際のX-Yロボット8の移動距離から、キャリブレーション値を計算している。
【先行技術文献】
【特許文献】
【0003】
特開平7-208924号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、CCDカメラ4をX-Yロボット8により一定距離移動させて、マーカの位置をキャリブレーションしている。しかしながら、特許文献1では、カメラを固定配置するようなシステムについて、実際にシステムを現場に配置した後で、経年的な環境の変化や外力が加わる等して、カメラとワークとの位置関係が変化した場合に対応することは考慮されていない。
【0005】
本発明は、上記実情に鑑みてなされたものであり、その目的は、支持部材に固定された撮像装置とワークとの位置関係が変化した場合に応じて、ワークの位置を補正できるロボットシステム、及び当該システムの位置補正方法を提供することにある。
【課題を解決するための手段】
【0006】
請求項1記載のロボットシステムによれば、ロボットアームの手先に取り付けられるツールを、ロボットの作業対象であるワークの位置決めを行う際にマーカとして使用する。撮像装置は、支持部材に固定された状態で、マーカ及びワークを捉えた画像を撮像する。基準位置設定部は、最初に前記画像より把握されるマーカに基づく基準位置を、ロボットの位置を基準とするロボット座標系上の位置に変換し、変換した位置を初期位置として設定する。ワーク位置設定部は、前記画像より把握されるワークの位置をロボット座標系上の位置に変換し、変換した位置をワークの位置として設定する。
【0007】
そして、基準位置設定部は、初期位置の設定後に、ワーク位置設定部により設定されるワークの位置が実際のワークの位置に一致しない状態になった場合、画像より把握される基準位置と初期位置との差に基いて、現時点のワーク位置座標系から初期位置を設定した時点の基準座標系におけるワーク位置に変換するための変換式を生成する。そして、ワーク位置設定部は、その変換式を用いてワークの位置を補正する。
【0008】
例えば、初期位置を記録させた以降に環境の変化等により支持部材が膨張又は収縮したり、支持部材に外力が加わる等して撮像装置の位置にずれが生じると、撮像装置の画像より把握されるワークの位置にもずれが生じてしまう。すると、ロボットは、ワークに対して所期の作業を行うことができなくなる。そこで、基準位置設定部が、現時点のワーク位置座標系から初期位置を設定した時点の基準座標系におけるワーク位置に変換するための変換式を生成し、ワーク位置設定部が、その変換式を用いてワークの位置を補正すれば、ワークの位置をロボット座標系上で正しく位置付けるように補正できる。したがって、ロボットは、ワークに対する作業を継続することが可能になる。
【0009】
そして、ロボットアームの手先に取り付けられるツールをマーカとして使用する。一般にロボットのアームは、作業を開始する前に毎回初期位置及び姿勢、原点位置にあるので、その手先にあるツールの位置も毎回同じ位置にある。したがって、ツールをマーカとして使用することができ、別途マーカを用意する必要がない。
【0010】
請求項2記載のロボットシステムによれば、ロボットが移動体上に配置されているシステムに適用する。このようなシステムでは、移動体が原点位置にある場合でも、移動の前後で若干のずれが生じていることも想定される。そのずれによってワークの位置を補正する必要が発生した場合でも、対応できる。尚この時、併せて支持部材の膨張や収縮等により撮像装置の位置にずれが生じていても、同様に補正できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイセイ
搬送装置
1か月前
川崎重工業株式会社
ハンド
26日前
国立大学法人金沢大学
ロボット
1か月前
株式会社不二越
ロボット
18日前
個人
けがき用治具
20日前
株式会社不二越
ロボット操作装置
17日前
個人
深孔スリーブ駆動ロッド構造
10日前
川崎重工業株式会社
ロボット
18日前
株式会社黒澤鉄工製作所
けがき用治具
20日前
個人
バール
10日前
工機ホールディングス株式会社
作業機
5日前
株式会社デンソー
操縦桿
18日前
川崎重工業株式会社
ロボットシステム
26日前
梅馨堂合同会社
人協働ロボットシステム
12日前
アピュアン株式会社
衝撃工具
1か月前
ARMA株式会社
UI付エンドエフェクタ
13日前
株式会社不二越
基板搬送用ロボット
27日前
株式会社コスメック
把持装置
1か月前
国立大学法人 東京大学
ロボットアーム
1か月前
株式会社デンソーウェーブ
ロボット制御システム
3日前
原利興工業有限公司
工具用スリーブ
1か月前
株式会社マキタ
作業機
17日前
株式会社マキタ
作業機
1か月前
若井ホールディングス株式会社
レンチ構造とその製造方法
20日前
株式会社マキタ
作業機
1か月前
学校法人法政大学
装着型アシスト装置
7日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
作業機
1か月前
アピュアン株式会社
エアー式衝撃工具
今日
三菱電機株式会社
トルク締め個所検出システム
10日前
株式会社マキタ
打ち込み工具
1か月前
セイコーエプソン株式会社
ロボットシステム
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ