TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025042538
公報種別
公開特許公報(A)
公開日
2025-03-27
出願番号
2023149621
出願日
2023-09-14
発明の名称
基板搬送ロボットシステム、および、基板検出方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
H01L
21/68 20060101AFI20250319BHJP(基本的電気素子)
要約
【課題】基板の状態をより精度よく検出することが可能な基板搬送ロボットシステム、および、基板検出方法を提供する。
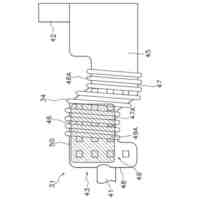
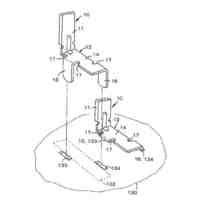
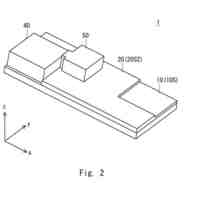
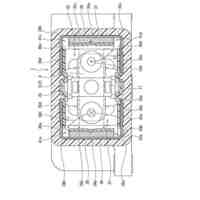
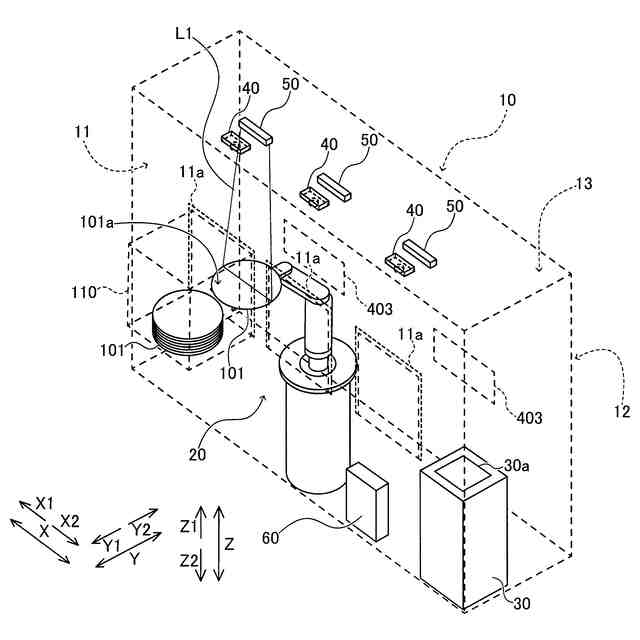
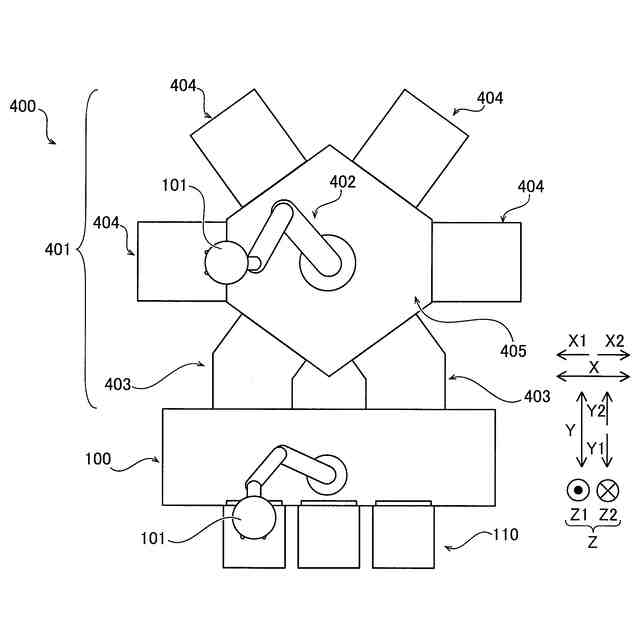
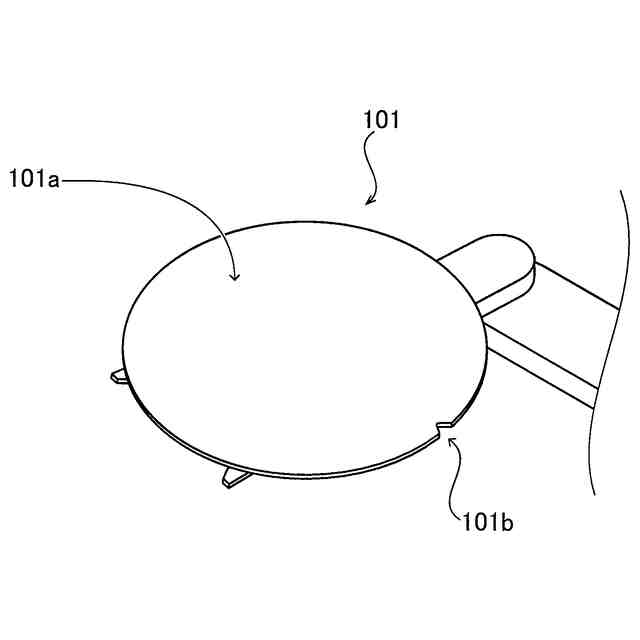
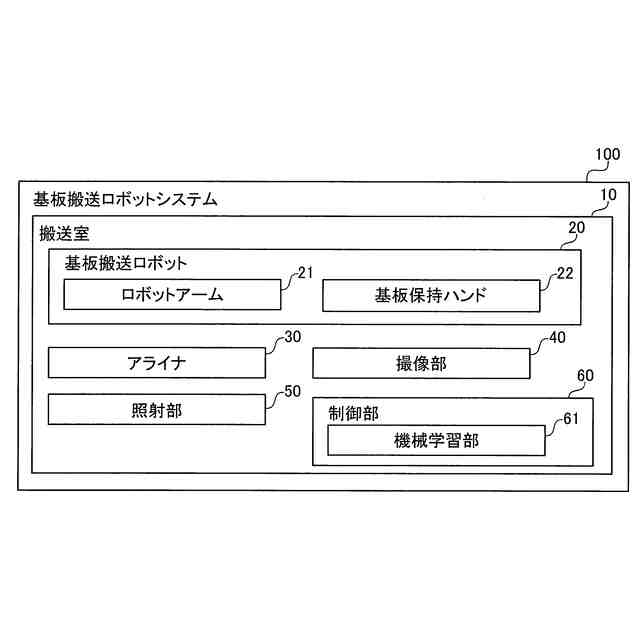
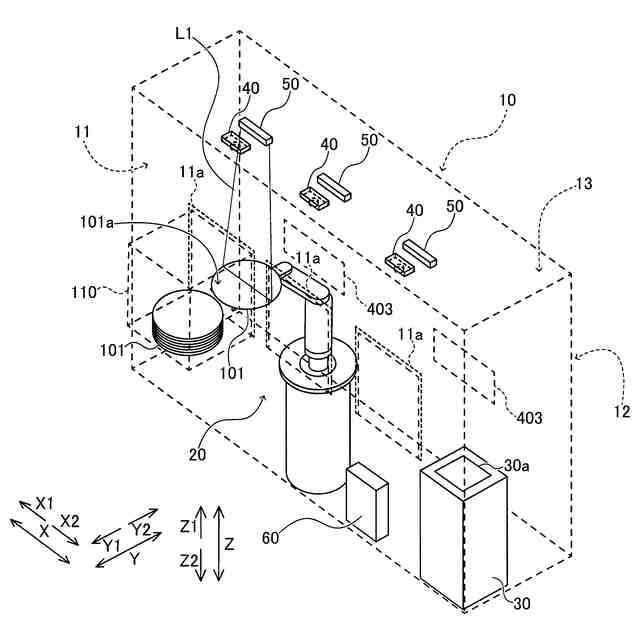
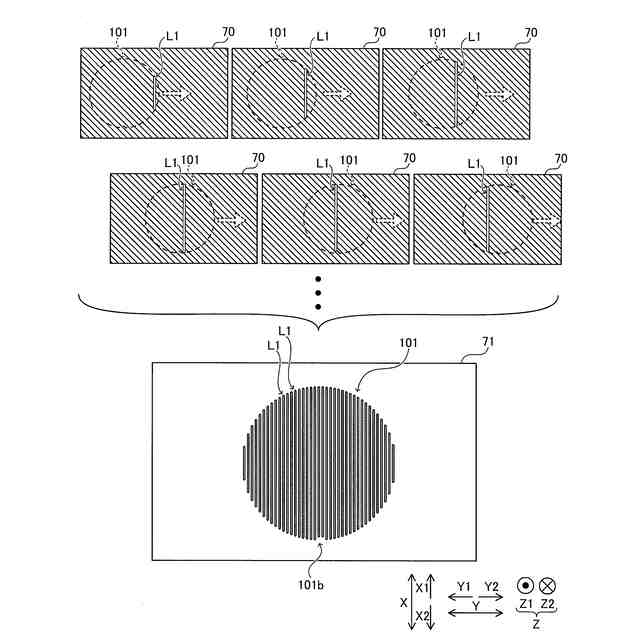
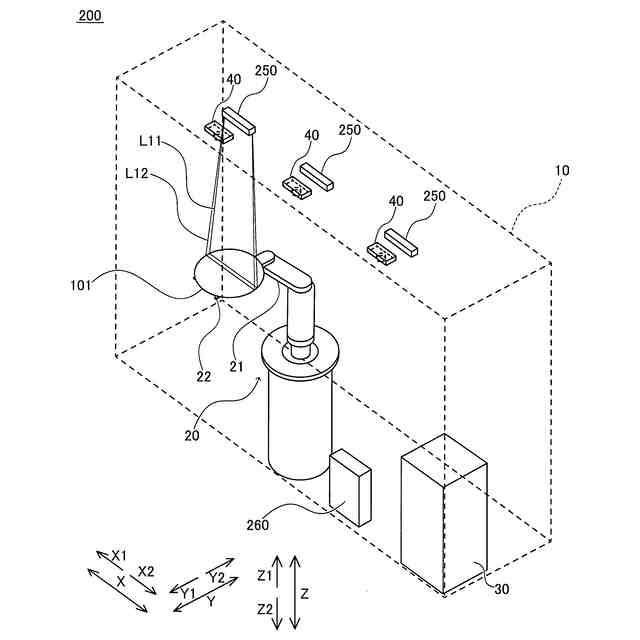
【解決手段】この基板搬送ロボットシステム100は、基板101を搬送するロボット20と、ロボット20に保持されている基板101の主表面101aに対して、所定の形状を有する検出光L1を照射する照射部50と、基板101を撮像することによって、基板101の主表面101aにおいて反射された検出光L1を撮像する撮像部40と、撮像部40により撮像された検出光L1の撮像画像に基づいて、基板101の状態を検出する制御部60と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
基板を搬送するロボットと、
前記ロボットに保持されている前記基板の主表面に対して、所定の形状を有する検出光を照射する照射部と、
前記基板を撮像することによって、前記基板の前記主表面において反射された前記検出光を撮像する撮像部と、
前記撮像部により撮像された前記検出光の撮像画像に基づいて、前記基板の状態を検出する制御部と、を備える、基板搬送ロボットシステム。
続きを表示(約 1,300 文字)
【請求項2】
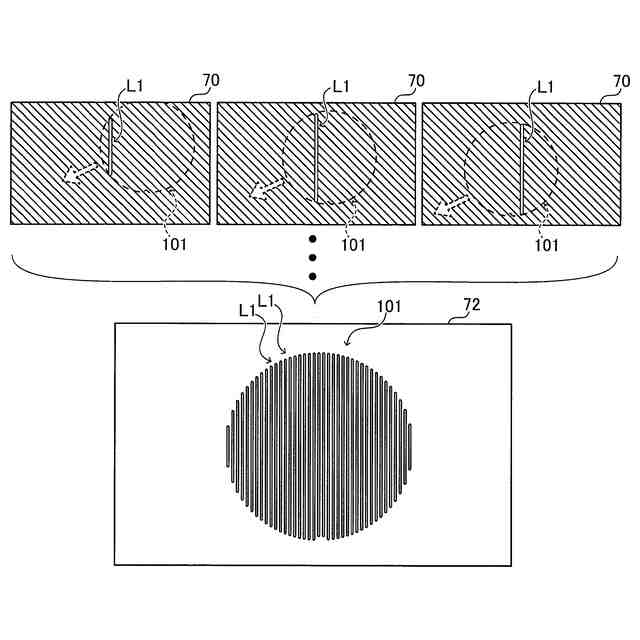
前記照射部は、相対的に位置および角度の少なくとも一方が変更される前記基板の前記主表面に対して前記検出光を照射し、
前記撮像部は、前記照射部に対する前記基板の相対的な位置および角度の少なくとも一方の変更に伴って、前記基板の前記主表面において反射された前記検出光を複数回に渡って撮像し、
前記制御部は、前記撮像部による複数回の撮像により、反射された複数の前記検出光を撮像することによって生成された一の前記撮像画像に基づいて、前記基板の状態を検出する、請求項1に記載の基板搬送ロボットシステム。
【請求項3】
前記ロボットは、前記撮像部による前記検出光の撮像が行われる場合に、前記照射部に対する前記基板の位置および角度の少なくとも一方を相対的に変更させる、請求項2に記載の基板搬送ロボットシステム。
【請求項4】
前記照射部は、前記照射部に対する前記基板の相対的な位置の変更における移動方向に交差する方向に沿うライン状の前記検出光、および、前記照射部に対する前記基板の相対的な角度の変更における回転動作の回転軸線方向に沿うライン状の前記検出光の少なくとも一方を照射する、請求項2または3に記載の基板搬送ロボットシステム。
【請求項5】
前記ロボットは、前記撮像部による前記検出光の撮像が行われる場合に、互いに異なる複数の移動方向に沿って前記基板を移動させ、
前記制御部は、前記ロボットの前記複数の移動方向に沿った前記基板の移動の各々における前記撮像画像に基づいて、前記基板の状態を検出する、請求項3に記載の基板搬送ロボットシステム。
【請求項6】
前記ロボットは、前記撮像部による前記検出光の撮像が行われる場合に、前記基板の水平面に対する角度を変更する、請求項3に記載の基板搬送ロボットシステム。
【請求項7】
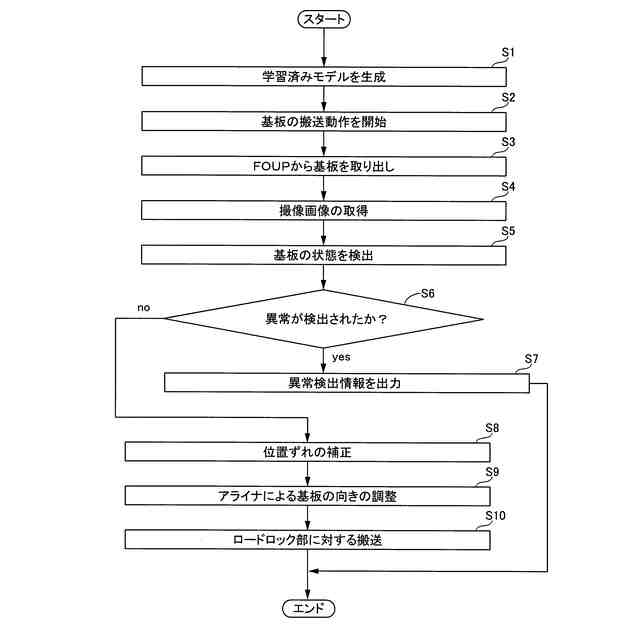
前記制御部は、前記撮像画像に基づいて、前記基板の形状、位置、向き、および、前記基板に生じている異常の少なくとも1つを含む前記基板の状態を検出する、請求項1~3のいずれか1項に記載の基板搬送ロボットシステム。
【請求項8】
前記制御部は、前記撮像画像に基づいて前記基板の状態を検出することによって、前記基板の向きを示すノッチまたはオリエンテーションフラットを検出する、請求項7に記載の基板搬送ロボットシステム。
【請求項9】
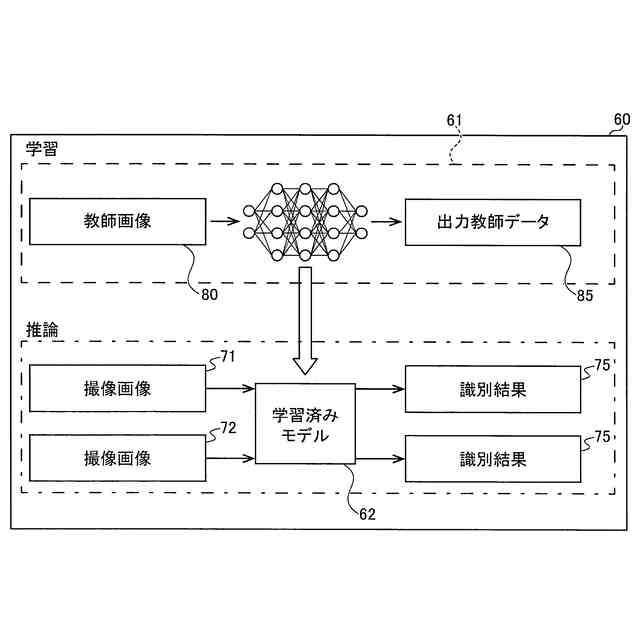
前記制御部は、機械学習により生成された学習済みモデルを用いて、前記撮像部による前記撮像画像に基づいて前記基板の状態を検出する、請求項1~3のいずれか1項に記載の基板搬送ロボットシステム。
【請求項10】
前記照射部は、互いに異なるライン状の第1検出光と第2検出光とを含む前記検出光を照射し、
前記制御部は、前記撮像部による複数回の撮像により生成された前記第1検出光および前記第2検出光を含む前記一の撮像画像に基づいて、前記基板の状態を検出する、請求項2または3に記載の基板搬送ロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、基板搬送ロボットシステム、および、基板検出方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、半導体ウェーハの変形を測定する測定デバイスが開示されている。特許文献1に開示されている測定デバイスは、半導体ウェーハにおいて反射された幾何学的な照明パターンが撮像された画像を分析することによって、半導体ウェーハの変形を測定する。特許文献1に記載の測定デバイスは、真空チャンバ内のターンテーブルに載置されて処理が行われている最中の半導体ウェーハを撮像する。真空チャンバにおける処理はターンテーブルを回転させながら行われるため、半導体ウェーハのサイズが大きい場合にも半導体ウェーハの全体分の反射像が撮像される。また、上記特許文献1には、真空チャンバの外部において、並進手段によって半導体ウェーハを直線的に移動させることによって、半導体ウェーハの全体分の反射像が撮像される例が記載されている。
【先行技術文献】
【特許文献】
【0003】
特許第7169994号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1のように、半導体ウェーハの変形などの基板の状態を検出するために、真空チャンバにおけるターンテーブルに載置された基板を撮像する場合には、ターンテーブルは回転方向の移動のみを行うため、撮像される基板の位置を調整することが困難である。また、真空チャンバの外部に配置された並進手段によって基板を直線的に移動させることによって基板の全体分の反射像を撮像する場合にも、基板が直線的に移動されるのみであるため、撮像される基板の位置を調整することは困難である。撮像される基板の位置を調整することが困難である場合には、基板の状態をより精度よく検出することが困難である。このため、基板を撮像することによって基板の状態を検出する場合に、基板の位置を調整することによって、基板の状態をより精度よく検出することが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、基板の状態をより精度よく検出することが可能な基板搬送ロボットシステム、および、基板検出方法を提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面による基板搬送ロボットシステムは、基板を搬送するロボットと、ロボットに保持されている基板の主表面に対して、所定の形状を有する検出光を照射する照射部と、基板を撮像することによって、基板の主表面において反射された検出光を撮像する撮像部と、撮像部により撮像された検出光の撮像画像に基づいて、基板の状態を検出する制御部と、を備える。
【0007】
この開示の第1の局面による基板搬送ロボットシステムは、上記のように、ロボットに保持されている基板の主表面に対して、所定の形状を有する検出光を照射する。そして、撮像部により撮像された検出光の撮像画像に基づいて、基板の状態が検出される。これにより、基板を搬送するロボットによって撮像される基板が保持されているため、ロボットの動作によって基板の位置を容易に調整できる。そのため、ロボットの動作によって、基板の状態を検出するために適切な位置に基板を容易に配置できるので、基板の状態をより精度よく検出できる。
【0008】
この開示の第2の局面による基板検出方法は、基板を搬送するロボットに保持されている基板を撮像することによって、基板の主表面において反射された所定の形状を有する検出光を撮像し、撮像された検出光の撮像画像に基づいて、基板の状態を検出する。
【0009】
この開示の第2の局面による基板検査システムは、上記のように、ロボットに保持されている基板を撮像し、撮像された検出光の撮像画像に基づいて、基板の状態を検出する。これにより、基板を搬送するロボットによって撮像される基板が保持されているため、ロボットの動作によって基板の位置を容易に調整できる。そのため、ロボットの動作によって、基板の状態を検出するために適切な位置に基板を容易に配置できるので、基板の状態をより精度よく検出することが可能な基板検出方法を提供できる。
【発明の効果】
【0010】
本開示によれば、基板の状態をより精度よく検出できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
汎用型電気プラグ
10日前
株式会社プロテリアル
ケーブル
24日前
キヤノン株式会社
通信装置
4日前
オムロン株式会社
電磁継電器
5日前
オムロン株式会社
電磁継電器
5日前
オムロン株式会社
電磁継電器
14日前
オムロン株式会社
電磁継電器
5日前
株式会社GSユアサ
蓄電設備
25日前
オムロン株式会社
電磁継電器
5日前
株式会社GSユアサ
蓄電装置
19日前
オムロン株式会社
電磁継電器
5日前
太陽誘電株式会社
コイル部品
10日前
タイガースポリマー株式会社
2次電池
12日前
日本特殊陶業株式会社
保持部材
21日前
株式会社小糸製作所
ターミナル
14日前
東レ株式会社
有機粒子およびフィルム
25日前
富士通株式会社
冷却モジュール
5日前
大電株式会社
導電用導体
17日前
オムロン株式会社
回路部品
5日前
株式会社東京精密
ワーク保持装置
3日前
株式会社タムラ製作所
装置
17日前
日本電気株式会社
光学モジュール
4日前
TDK株式会社
コイル部品
4日前
富士通株式会社
アンテナ装置
25日前
富士電機株式会社
電磁接触器
10日前
新電元工業株式会社
磁性部品
12日前
ヒロセ電機株式会社
コネクタ
20日前
オリオン機械株式会社
発電システム
19日前
ニチコン株式会社
コンデンサ
11日前
三菱電機株式会社
半導体装置
5日前
オムロン株式会社
電磁継電器
5日前
東洋紡株式会社
インターポーザの製造方法
24日前
三菱電機株式会社
半導体装置
20日前
富士電機株式会社
半導体装置
25日前
オムロン株式会社
電磁継電器
5日前
株式会社東芝
半導体装置
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ