TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025041064
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2023148121
出願日
2023-09-13
発明の名称
無人航空機システム
出願人
ウシオ電機株式会社
代理人
弁理士法人ユニアス国際特許事務所
主分類
B64U
50/35 20230101AFI20250318BHJP(航空機;飛行;宇宙工学)
要約
【課題】無線給電機構を単純化した、無人航空機のシステムを提供する。
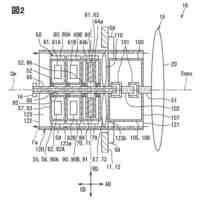
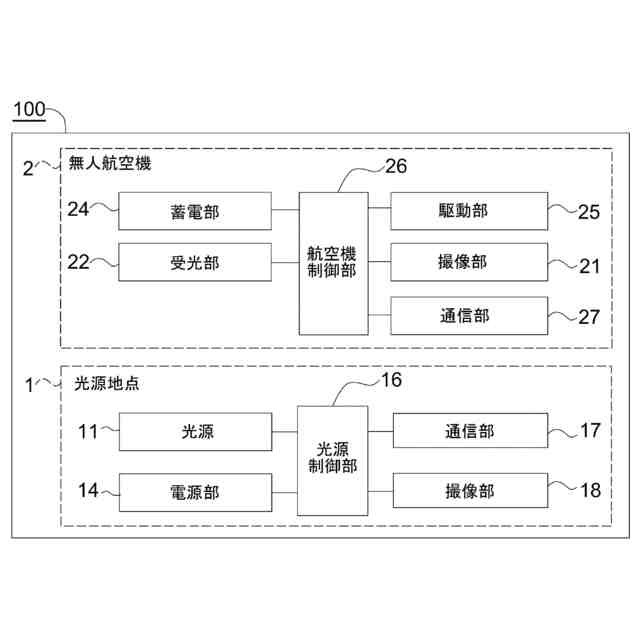
【解決手段】本発明の無人航空機のシステムは、光を直上方向に出射するように固定した状態で、地上から前記光を出射する光源を備える光源地点と、前記光を受け取って電力に変換する受光部、前記受光部から送られた前記電力を蓄える蓄電部、前記蓄電部に蓄えられた前記電力によって回転翼を回転させる駆動部、前記駆動部を制御する制御部を有する前記無人航空機と、を備え、前記制御部は、前記受光部に照射された光の分布に基づいて前記駆動部を制御する。
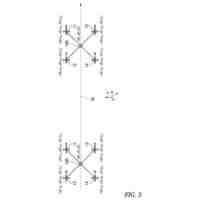
【選択図】図3
特許請求の範囲
【請求項1】
光を直上方向に出射するように固定した状態で、地上から前記光を出射するための光源を備える、光源地点と、
前記光を受け取って電力に変換する受光部、前記受光部から送られた前記電力を蓄える蓄電部、前記蓄電部に蓄えられた前記電力によって回転翼を回転させる駆動部、前記駆動部を制御する制御部を有する、前記無人航空機と、を備え、
前記制御部は、前記受光部に照射された光の分布に基づいて、前記駆動部を制御することを特徴とする、無人航空機のシステム。
続きを表示(約 1,000 文字)
【請求項2】
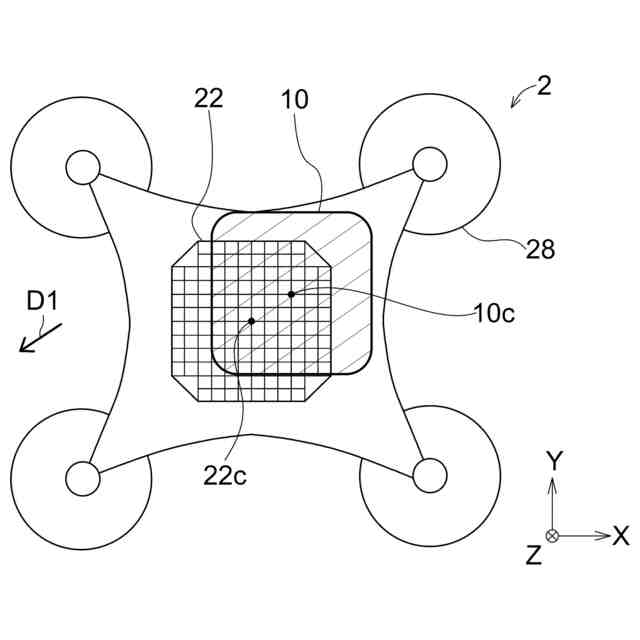
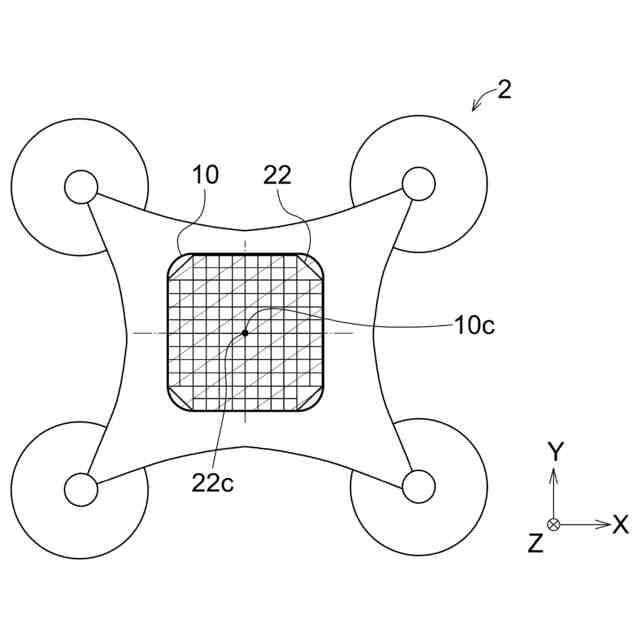
前記制御部は、前記受光部に照射された前記光の中心が、前記受光部の所定位置に来るように、前記駆動部を制御することを特徴とする、請求項1に記載のシステム。
【請求項3】
前記光は発散光又は集束光であり、
前記制御部は、前記受光部に照射される光の大きさから前記無人航空機が飛行する高度を導出し、導出した高度に基づいて前記駆動部を制御することを特徴とする、請求項1又は2に記載のシステム。
【請求項4】
前記光の出射方向に直交する断面における光強度分布は非円形であり、
前記制御部は、前記受光部における前記光の回転量を検出して、前記無人航空機のヨー角θzを制御することを特徴とする、請求項1又は2に記載のシステム。
【請求項5】
前記制御部は、前記受光部が受け取った前記光の形状の変化量を検出して、前記無人航空機のロール角θx及びピッチ角θyを制御することを特徴とする、請求項1又は2に記載のシステム。
【請求項6】
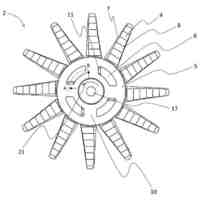
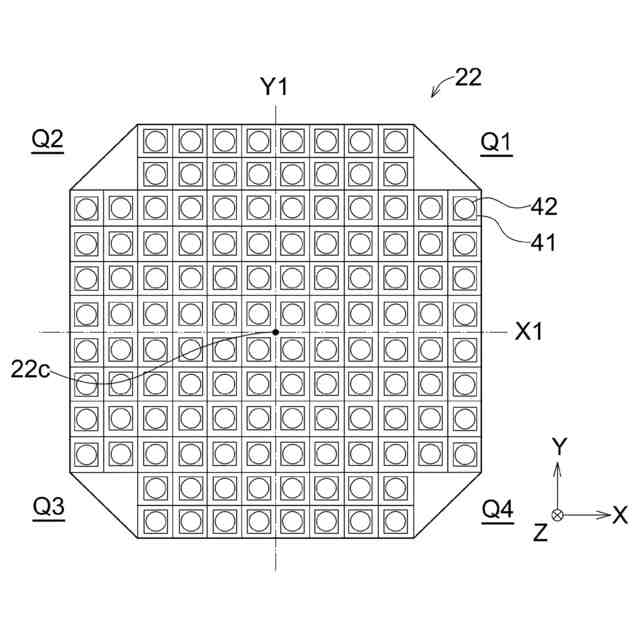
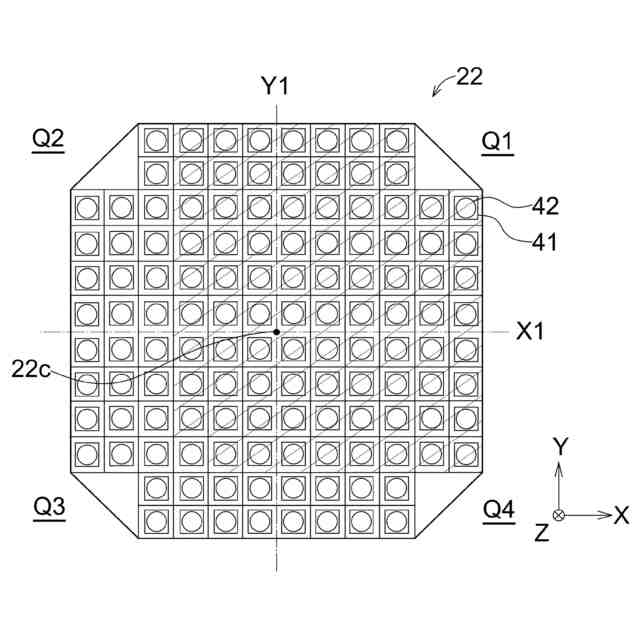
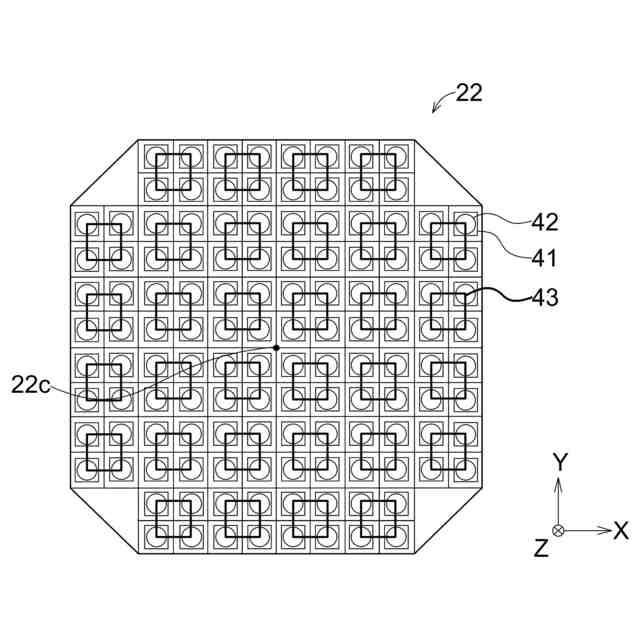
前記受光部は複数の受光領域に区別され、
前記複数の受光領域は、それぞれ複数の光電変換素子からなり、
前記制御部は、前記受光領域ごとに受け取る光起電力量に基づいて、前記駆動部を制御することを特徴とする、請求項1又は2に記載のシステム。
【請求項7】
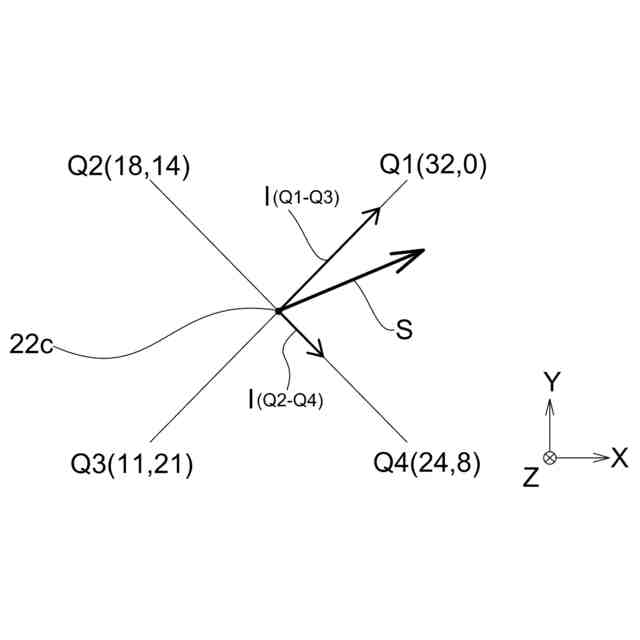
前記複数の受光領域は、第一軸と、前記第一軸に直交する第二軸によって区切られる第一~第四象限の4つの領域から構成され、
前記制御部は、前記受光部に照射された前記光の中心が、前記受光部の、前記第一軸と前記第二軸の交点にある所定位置に来るように、前記駆動部を制御することを特徴とする、請求項6に記載のシステム。
【請求項8】
前記受光部は、複数の光電変換素子を備え、個々の前記光電変換素子が生成する光起電力量を検出できることを特徴とする、請求項1又は2に記載のシステム。
【請求項9】
ビームプロファイルカメラを使用して、前記受光部を透過する光の一部を検出することにより、前記受光部の受光状態を検出することを特徴とする、請求項1又は2に記載のシステム。
【請求項10】
前記無人航空機は、角速度センサ及び加速度センサの少なくとも一つを備え、
前記制御部は、前記角速度センサ又は前記加速度センサからの信号を取得することを特徴とする、請求項1又は2に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、無人航空機システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
様々な分野でドローンなどの無人航空機が使用されている。無人航空機は軽量であるため、僅かな電気エネルギーで長時間飛行できるという利点がある。
【0003】
無人航空機の飛行時間を延ばすためには、無人航空機に搭載する蓄電部の容量を大きくすることが考えられる。しかし、蓄電部の容量を大きくすると、無人航空機の重量が増すために、必ずしも飛行時間の延長に繋がらない。
【0004】
そこで、地上から電気エネルギーを光エネルギーに変換して飛行中の無人航空機に送る無線給電方法が知られている。特許文献1には、飛行中の無人航空機に向けて赤外光を照射する方法が記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2019-013063号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、無人航空機を任意の高度で一箇所に留まるように飛行させたいというニーズがある。その目的は、例えば、無人航空機に監視カメラを搭載して地上を監視することである。通常であれば、ビル等の高い構造物に監視カメラを取り付けることで、高所から地上の監視を行う。しかし、構造物の建設費用や賃借費用が発生する。また、様々な法規制により、監視カメラを取り付けるための構造物を建設できない場合や、構造物を借用できない場合も多い。しかしながら、無人航空機に監視カメラを搭載すれば、構造物の建設費用や賃借費用が発生せず、構造物の建設や借用に関する法規制への対応が不要となる。
【0007】
一方で、無人航空機に監視カメラを搭載して監視を続ける場合、飛行時間が長時間に及ぶ。蓄電部の容量には限界があるため、監視可能な時間が、無人航空機の飛行可能時間によって制約を受けやすくなる。そこで、特許文献1に記載されているような無線給電方法を導入すると、このような制約を受けにくくなる。しかしながら、特許文献1の無線給電方法では、地上から無人航空機を追尾し、空中を移動する無人航空機に向かって、光源の出射方向を調整しながら光を出射する、という複雑なシステムを必要とする。本発明が解決しようとする課題は、無線給電機構を単純化した、無人航空機システムを提供することである。
【課題を解決するための手段】
【0008】
かかる問題に対応するため、本発明者は、以下の無人航空機システムを案出した。
本発明は、無人航空機のシステムであって、
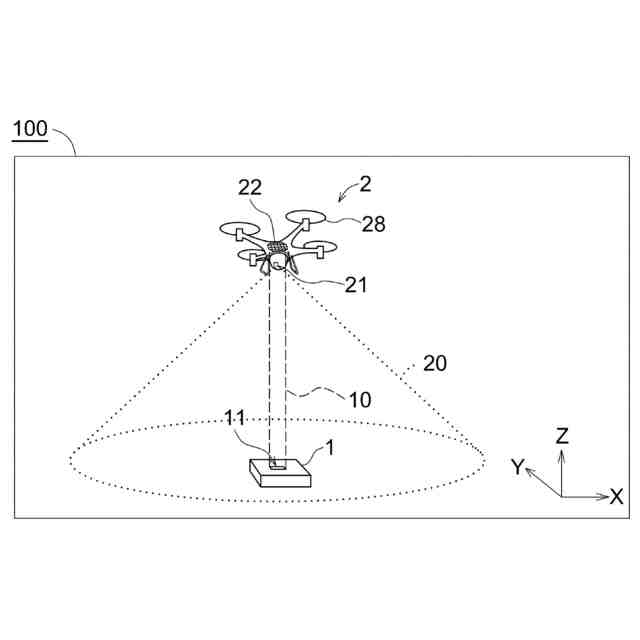
光を直上方向に出射するように固定した状態で地上から前記光を出射するための光源を備える、光源地点と、
前記光を受け取って電力に変換する受光部、前記受光部から送られた前記電力を蓄える蓄電部、前記蓄電部に蓄えられた前記電力によって回転翼を回転させる駆動部、前記駆動部を制御する制御部を有する、前記無人航空機と、を備え、
前記制御部は、前記受光部に照射された光の分布に基づいて、前記駆動部を自律的に制御する。
【0009】
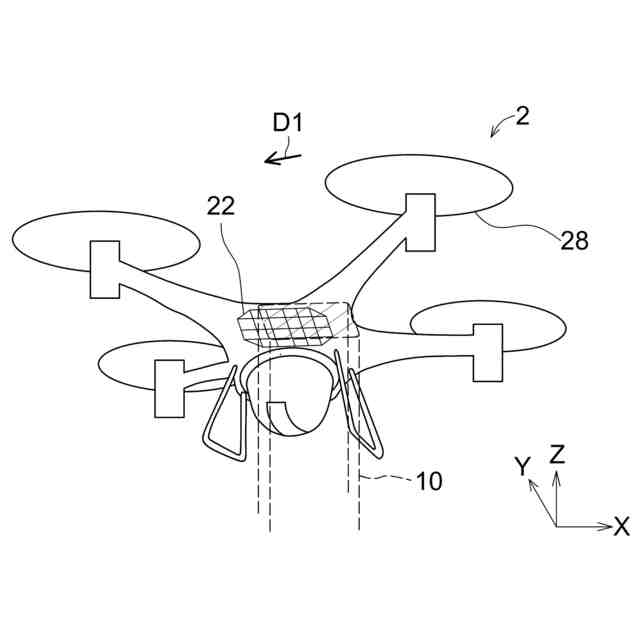
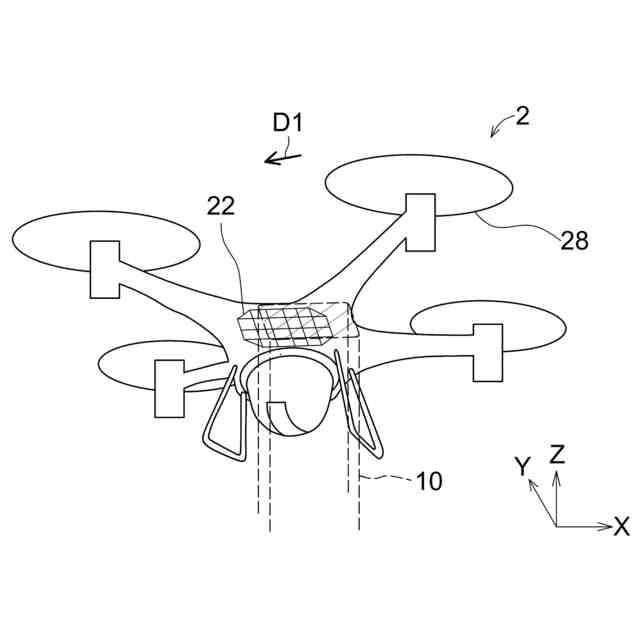
本明細書において、無人航空機とは、人が搭乗できない飛行体を指す。無人航空機は、リモート制御装置による遠隔操作により飛行するか、又は、無人航空機自体が自立的に飛行する。無人航空機は、空中で停止(ホバリング)することができる。無人航空機は、所謂、ドローンを含む。無人航空機は、回転翼を有する回転翼機(ヘリコプタ又はマルチコプタ)であっても構わない。回転翼機は、回転翼を回転させることで揚力及び推力を得る。
【0010】
前記無人航空機は、前記蓄電部に蓄えた電力でモータを駆動して回転翼を回転させる。前記無人航空機は、地上に配置された光源地点から出射される光を前記受光部で受ける。前記光を前記受光部で電力に変換し、蓄電部に電力を蓄える。すなわち、蓄電部を充電する。前記無人航空機は飛行しながら蓄電部を充電できるため、前記無人航空機を離着陸させる回数を削減できる。なお、前記蓄電部は、蓄電池又はキャパシタである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
24日前
個人
ドローンシステム
2か月前
株式会社三圓
浮上装置
6か月前
個人
ドローンの計測操作方法2
6か月前
個人
垂直離着陸機用エンジン改
2か月前
個人
ドローンの計測操作方法3
6か月前
個人
飛行艇
8か月前
キヤノン電子株式会社
磁気トルカ
7か月前
個人
ドローン消音装置
5か月前
個人
空中移動システム
3か月前
個人
ドローンを自動離着陸する方法
2か月前
トヨタ自動車株式会社
ドローン
11日前
個人
エアライナー全自動パラシュート
24日前
株式会社ACSL
システム
1か月前
合同会社アドエア
パラシュート射出装置
24日前
株式会社ACSL
システム
1か月前
合同会社アドエア
飛行体の落下補助装置
3か月前
株式会社SUBARU
移動体
3か月前
個人
垂直離着陸機用ガスタービンエンジン
2か月前
全日本空輸株式会社
ドーリシステム
5か月前
ミネベアミツミ株式会社
無人機
10日前
ミネベアミツミ株式会社
無人機
10日前
HDサービス合同会社
カメラ装着装置
5か月前
株式会社デンソー
推進装置
8か月前
本田技研工業株式会社
移動体
7か月前
本田技研工業株式会社
移動体
7か月前
本田技研工業株式会社
移動体
5か月前
本田技研工業株式会社
航空機
5か月前
本田技研工業株式会社
航空機
5か月前
株式会社小糸製作所
航空機用灯具
7か月前
株式会社日立製作所
推進装置
4か月前
株式会社SUBARU
構造体の製造方法
7か月前
株式会社SUBARU
構造体の製造方法
7か月前
一般財団法人日本鯨類研究所
航空機
7か月前
個人
回転翼飛行体
8か月前
三菱重工業株式会社
搬送方法
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ