TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025018002
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023121367
出願日
2023-07-26
発明の名称
搬送方法
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
主分類
B64U
10/13 20230101AFI20250130BHJP(航空機;飛行;宇宙工学)
要約
【課題】重量物、長尺物などの単一のUAVでは搬送することが容易でない荷物を複数のUAVで安定した姿勢で搬送する方法を提供すること。
【解決手段】複数のUAVにより荷物を吊り下げながら搬送する方法において、
荷物に対する複数のUAVのそれぞれの相対的な位置関係が維持されるように、複数のUAVのそれぞれが飛行する。
この搬送方法は、荷物の対地に対する位置の変動に追従して、複数のUAVのそれぞれの飛行が制御される対地位置制御モード、および、荷物に対する複数のUAVのそれぞれの間隔を維持するように、複数のUAVのそれぞれの飛行が制御される間隔制御モードの一方または双方により実現される。
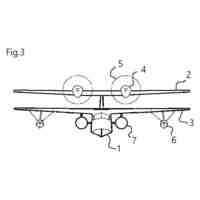
【選択図】図3
特許請求の範囲
【請求項1】
複数の無人航空機により荷物を吊り下げながら搬送する方法であって、
前記荷物の位置を基準にして、複数の前記無人航空機のそれぞれの位置を制御しながら、複数の前記無人航空機が飛行する、
搬送方法。
続きを表示(約 1,000 文字)
【請求項2】
前記荷物に対する複数の前記無人航空機のそれぞれの相対的な位置関係が維持されるように、複数の前記無人航空機のそれぞれが飛行する、
請求項1に記載の搬送方法。
【請求項3】
前記荷物に対する複数の前記無人航空機のそれぞれの相対的な位置関係の維持は、
前記荷物の対地に対する位置の変動に追従して、複数の前記無人航空機のそれぞれの飛行が制御される対地位置制御モード、
および、
前記荷物に対する複数の前記無人航空機のそれぞれの間隔を維持するように、複数の前記無人航空機のそれぞれの飛行が制御される間隔制御モードの一方または双方により実現される、請求項2に記載の搬送方法。
【請求項4】
前記対地位置制御モードにおいて、
搬送される前記荷物の現在位置情報を複数の前記無人航空機のそれぞれが取得する情報取得ステップと、
前記現在位置情報に対する複数の前記無人航空機のそれぞれの相対的な位置関係が維持されるように、複数の前記無人航空機のそれぞれが飛行する飛行制御ステップと、を備える、
請求項3に記載の搬送方法。
【請求項5】
前記情報取得ステップにおいて、
前記現在位置情報は、衛星測位システムから取得する対地位置情報であり、複数の前記無人航空機のそれぞれに送信され、
前記飛行制御ステップにおいて、
前記対地位置情報に基づいて、複数の前記無人航空機のそれぞれが飛行する、
請求項4に記載の搬送方法。
【請求項6】
前記間隔制御モードにおいて、
複数の前記無人航空機のそれぞれと前記荷物との間隔を測定する間隔測定ステップと、
複数の前記無人航空機のそれぞれにおける前記間隔が維持されるように、複数の前記無人航空機のそれぞれの飛行が制御される飛行制御ステップと、
を備える請求項3に記載の搬送方法。
【請求項7】
複数の前記無人航空機のそれぞれと前記荷物との前記間隔は、
前記荷物に設けられる間隔を測定する測距センサおよび複数の前記無人航空機のそれぞれに設けられる前記測距センサの一方または双方により測定されるか、または、
前記衛星測位システムから取得する前記荷物における対地位置情報と、前記衛星測位システムから取得する複数の前記無人航空機のそれぞれにおける対地位置情報とを比較することにより測定される、
請求項6に記載の搬送方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、無人航空機(Unmanned Aerial Vehicle:UAV)を用いて荷物を搬送する方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
UAVは垂直離着陸が可能であり、狭い敷地しか確保できない場合でも、荷物を運ぶことができる。例えば特許文献1は、航空機の曳航に複数のUAVを用いる曳航システムを開示する。具体的には、機体と固定翼を有する航空機を、複数の電動ファンを有するUAVとしてのマルチファンで曳航することを提案する。したがって、特許文献1は、複数のUAVによる荷物の搬送システムと捉えることもできる。
【先行技術文献】
【特許文献】
【0003】
特開2022-63254号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
UAVで荷物を運ぶ場合、その荷物の重量や大きさに合わせて,それを運べる無人機を選定する必要がある。つまり、小型UAVであれば一例として最大ペイロード(payload)が数kg、中型UAVであれば一例として最大Payloadが数百kgというように、搬送できる最大の重量が決められる。また、payloadだけでなく、搬送する荷物の寸法にも制約がある。つまり、UAVの全長よりも長尺な荷物の場合、荷物の重心位置を機体の重心に揃えたり、突風や横風に荷物があおられた場合に荷物の姿勢を維持したりするのが容易でない。
そこで本開示は、重量物、長尺物などの単一のUAVでは搬送することが容易でない荷物を複数のUAVで安定した姿勢で搬送できる方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本開示に係る複数の無人航空機により荷物を吊り下げながら搬送する方法は、
荷物の位置を基準にして、複数の無人航空機の位置を制御しながら、複数の無人航空機のそれぞれが飛行する。
【発明の効果】
【0006】
本開示によれば、荷物の位置を基準にして、複数の無人航空機の位置を制御しながら、複数の無人航空機のそれぞれが飛行する。したがって、本開示によれば、重量物、長尺物などの単一のUAVでは搬送することが容易でない荷物を複数のUAVで安定した姿勢で搬送することができる。
【図面の簡単な説明】
【0007】
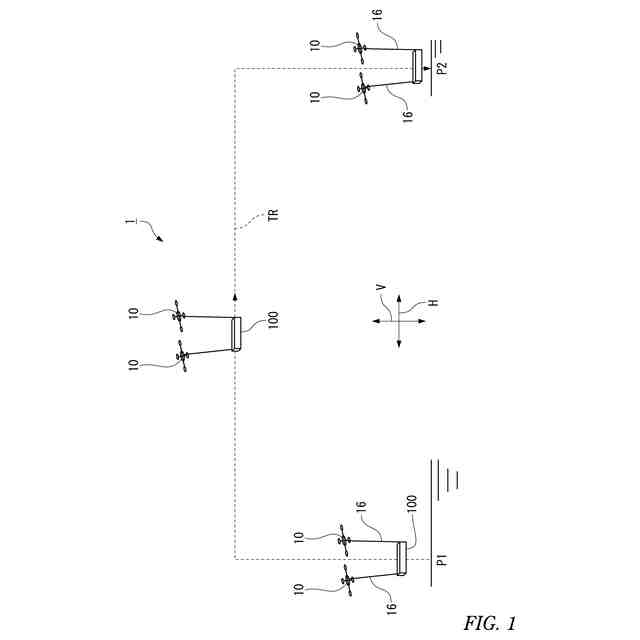
実施形態に係る荷物の搬送方法の概要を示す図である。
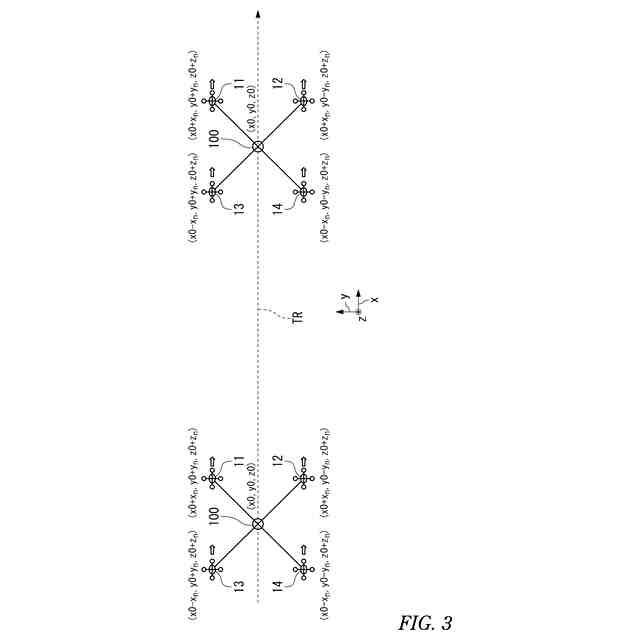
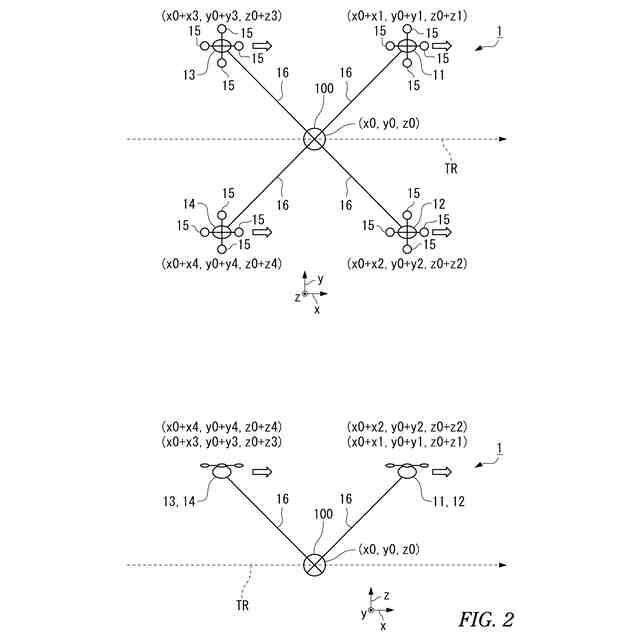
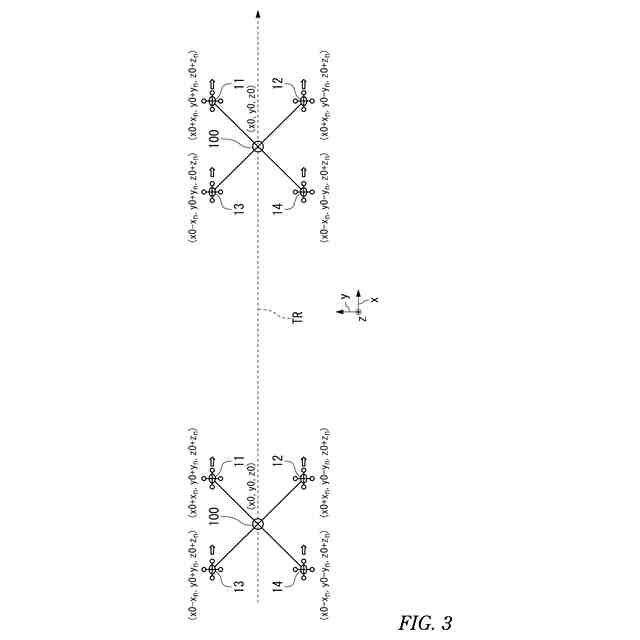
対地位置制御モードにおける相対的な位置関係の維持の説明に用いる図である。
対地位置制御モードにおける相対的な位置関係の維持の説明に用いる図である。
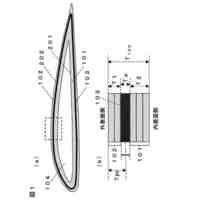
荷物が備える第1コントローラ(Lug.)とUAVが備える第2コントローラ(UAV)の構成を示す図である。
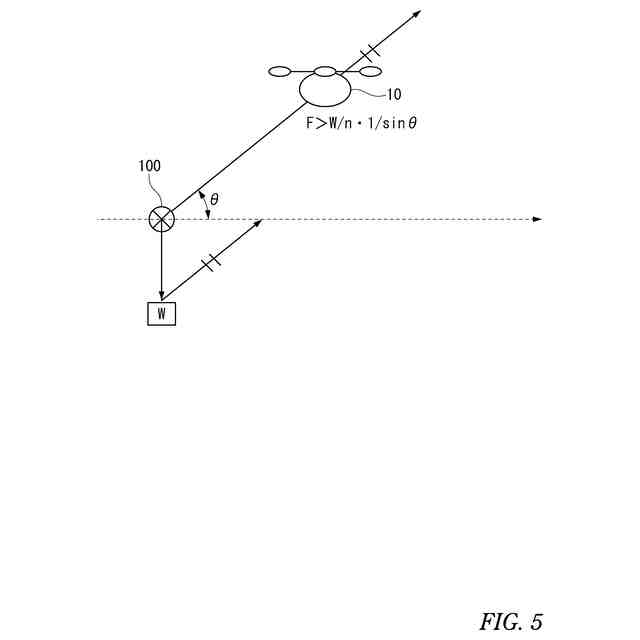
本実施形態における好ましい推力を説明する図である。
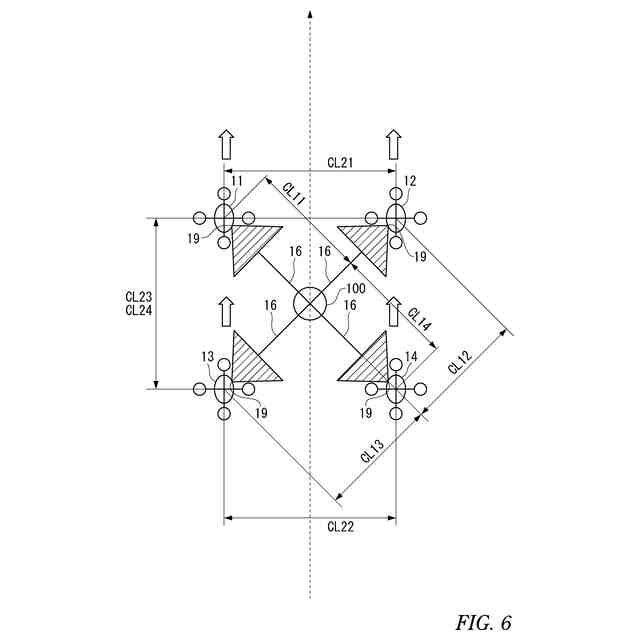
間隔制御モードにおける相対的な位置関係の維持の説明に用いる図である。
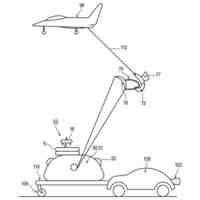
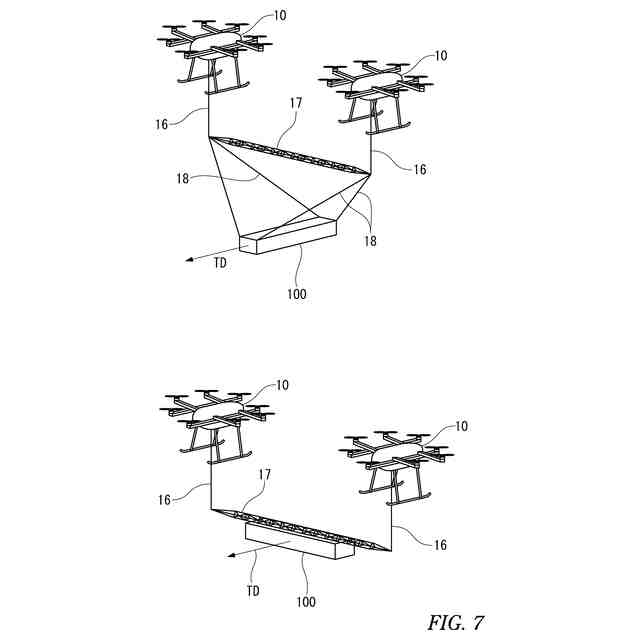
搬送形態の一例を示す図である。
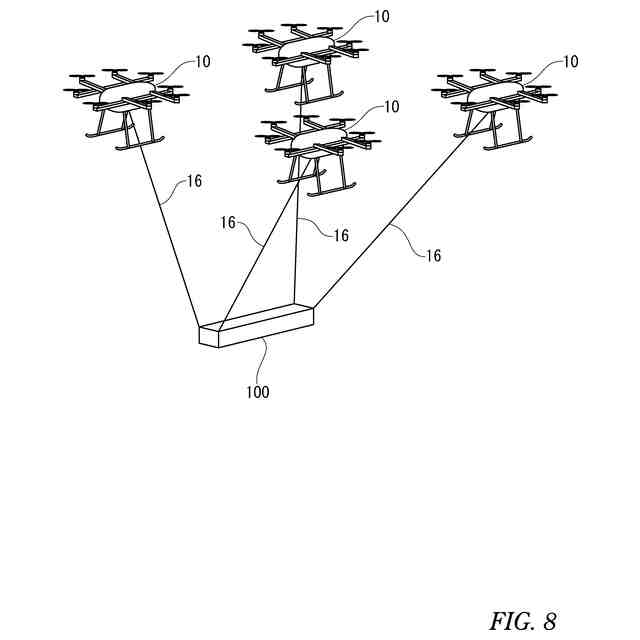
搬送形態の他の例を示す図である。
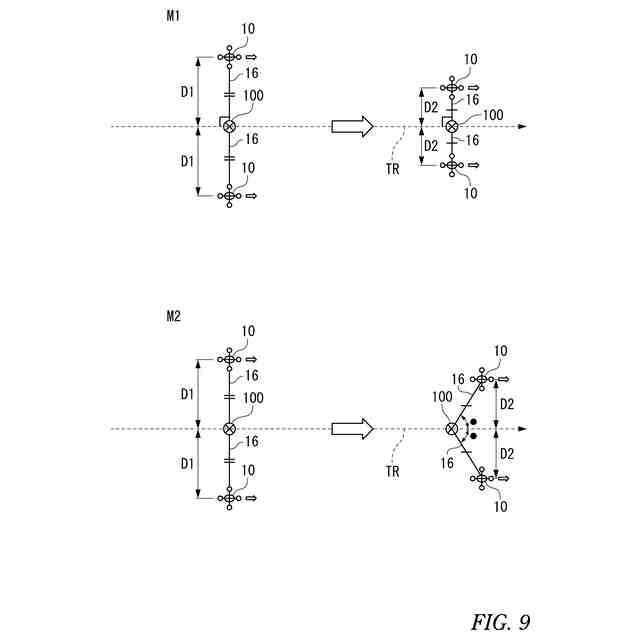
相対的な位置関係の維持の他の例を説明するための図である。
相対的な位置関係の維持の他の例を説明するための図である。
【発明を実施するための形態】
【0008】
以下、添付図面を参照しながら、実施形態に係る搬送方法および搬送システムについて説明する。
【0009】
〔搬送方法の概略:図1参照〕
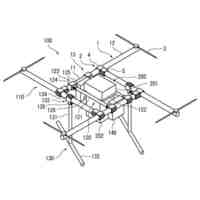
実施形態に係る荷物の搬送方法は、図1に示されるように、荷物100を搬送元P1から搬送先P2まで搬送経路TRを通って搬送される。なお、図1に示される搬送経路TRは説明の便宜のために示しており、予定されている搬送経路TRから許容される範囲だけ荷物100がずれて搬送が行われることはあり得る。なお、本実施形態において、水平方向Hおよび鉛直方向Vが図1に示されるように定義される。
【0010】
荷物100は一例として吊下ケーブル16を介して複数のUAV10に吊り下げられた状態で搬送元P1を出発する。荷物100が重量物、長尺物などの単一のUAV10では搬送することが容易でない荷物を複数のUAVで安定した姿勢で搬送先P2まで搬送できる。したがって、搬送経路TRの途上において、荷物100と荷物100を吊り下げて搬送する複数のUAV10とが衝突したり、複数のUAV10同士が衝突したりすることが回避される。
なお、本開示におけるUAVとは、構造上人が乗ることができない航空機であって、自律飛行できるものをいい、ドローンと同義である。
さらに、本開示における荷物100は特定のものに限定されるものではなく、搬送の対象となり得る固体はもちろん、気体および液体であっても容器に収容されると、荷物100となり得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
4か月前
個人
人工台風
7日前
個人
着火ドローン
2か月前
個人
救難消防飛行艇
2か月前
個人
ドローンシステム
6か月前
東レ株式会社
中空回転翼
1か月前
株式会社三圓
浮上装置
10か月前
個人
連続回転可能な飛行機翼
2か月前
個人
陸海空用の乗り物
3か月前
個人
空飛ぶクルマ
1か月前
個人
垂直離着陸機用エンジン改
6か月前
個人
ドローンの計測操作方法3
10か月前
東レ株式会社
プロペラブレード
1か月前
東レ株式会社
プロペラブレード
1か月前
個人
ドローンの計測操作方法2
10か月前
東レ株式会社
プロペラブレード
1か月前
キヤノン電子株式会社
磁気トルカ
11か月前
個人
空中移動システム
7か月前
個人
ドローン消音装置
9か月前
個人
ドローンを自動離着陸する方法
6か月前
個人
エアライナー全自動パラシュート
4か月前
トヨタ自動車株式会社
ドローン
4か月前
合同会社アドエア
パラシュート射出装置
4か月前
合同会社アドエア
飛行体の落下補助装置
7か月前
個人
搬送方法および搬送システム
1か月前
個人
ヘリコプター駆動装置
1か月前
株式会社ACSL
システム
5か月前
株式会社ACSL
システム
5か月前
株式会社小糸製作所
飛行体ポート
2か月前
個人
垂直離着陸機用ガスタービンエンジン
6か月前
個人
飛行体
1か月前
個人
飛行体
28日前
個人
パラボラ型スペースデブリカタパルト
1か月前
株式会社SUBARU
移動体
7か月前
全日本空輸株式会社
ドーリシステム
9か月前
HDサービス合同会社
カメラ装着装置
9か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ