TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025040913
公報種別
公開特許公報(A)
公開日
2025-03-25
出願番号
2023185930
出願日
2023-10-30
発明の名称
ソーラーアレイ出力特性に基づく最大電力点追従方法、及び装置
出願人
三峡国際能源投資集団有限公司
代理人
弁理士法人朝日奈特許事務所
主分類
G05F
1/67 20060101AFI20250317BHJP(制御;調整)
要約
【課題】完全なソーラーアレイ出力電力特性曲線をスキャンする必要がなく、最適化速度を大幅に向上させ、また、粒子群アルゴリズムを利用して正確な探索を行い、出力電力特性曲線の実際のグローバルな最良点、すなわち目標最大電力点を得ることによって、アルゴリズムが局所的な最適になることを回避するソーラーアレイの出力特性に基づく最大電力点追従方法及び装置を提供する。
【解決手段】方法は、ソーラーアレイ出力電力特性曲線の各局所的な最良点がソーラーモジュール開回路電圧を基準量として均等に分布するという原理を利用して、ソーラーモジュールの開回路電圧を探索ステップサイズとして出力電力特性曲線を探索するだけで、出力電力特性曲線のグローバルな最良点、つまり第1最大電力点を迅速に特定する。
【選択図】図1
特許請求の範囲
【請求項1】
ソーラーアレイ出力特性に基づく最大電力点追従方法であって、
前記ソーラーアレイはソーラーモジュールを含み、
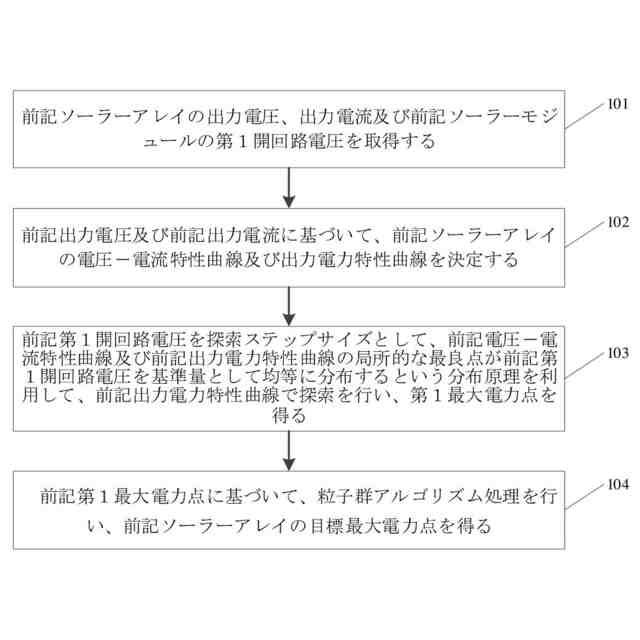
前記ソーラーアレイの出力電圧、出力電流及び前記ソーラーモジュールの第1開回路電圧を取得するステップと、
前記出力電圧及び前記出力電流に基づいて、前記ソーラーアレイの電圧-電流特性曲線及び出力電力特性曲線を決定するステップと、
前記第1開回路電圧を探索ステップサイズとして、前記電圧-電流特性曲線及び前記出力電力特性曲線の局所的な最良点が前記第1開回路電圧を基準量として均等に分布するという分布原理を利用して、前記出力電力特性曲線で探索を行い、第1最大電力点を得るステップと、
前記第1最大電力点に基づいて、粒子群アルゴリズム処理を行い、前記ソーラーアレイの目標最大電力点を得るステップと、を含むことを特徴とするソーラーアレイ出力特性に基づく最大電力点追従方法。
続きを表示(約 3,000 文字)
【請求項2】
前記ソーラーモジュールの第1開回路電圧を取得するステップは、
前記ソーラーアレイの第2開回路電圧及び前記ソーラーアレイの直列電池の数を取得するステップと、
前記第2開回路電圧及び前記直列電池の数に基づいて、前記第1開回路電圧を決定するステップと、を含むことを特徴とする請求項1に記載の方法。
【請求項3】
前記第1開回路電圧を探索ステップサイズとして、前記電圧-電流特性曲線及び前記出力電力特性曲線の局所的な最良点が前記第1開回路電圧を基準量として均等に分布するという分布原理を利用して、前記出力電力特性曲線で探索を行い、第1最大電力点を得るステップは、
前記第1開回路電圧に基づいて、初期点電圧を決定するステップと、
前記初期点電圧、前記第1開回路電圧及び前記直列電池の数に基づいて、最大探索電圧を決定するステップと、
前記初期点電圧及び前記最大探索電圧に基づいて探索範囲を決定するステップと、
前記探索範囲内で、前記電圧-電流特性曲線に基づいて、前記第1開回路電圧を前記探索ステップサイズとして前記出力電力特性曲線で探索を行い、前記第1最大電力点を得るステップと、を含むことを特徴とする請求項2に記載の方法。
【請求項4】
前記探索範囲内で、前記電圧-電流特性曲線に基づいて、前記第1開回路電圧を前記探索ステップサイズとして前記出力電力特性曲線で探索を行い、前記第1最大電力点を得るステップは、
前記ソーラーアレイの第1電圧を取得するステップと、
前記第1電圧に基づいて、前記電圧-電流特性曲線で前記ソーラーアレイの第1電流を決定するステップと、
前記第1電圧及び前記第1電流に基づいて、前記ソーラーアレイの第1電力を決定するステップと、
前記探索ステップサイズに基づいて前記第1電圧を更新し、前記ソーラーアレイの更新後の第2電圧及び第2電流を取得するステップと、
前記第2電圧及び前記第2電流に基づいて、前記ソーラーアレイの第2電力を決定するステップと、
前記第2電力と前記第1電力とを比較するステップと、
前記第2電力が前記第1電力よりも大きい場合、前記第2電力を利用して前記第1電力を更新するとともに、前記第2電圧を利用して前記第1電圧を更新し、前記第2電圧を反復して前記最大探索電圧にすると反復を停止し、目標電圧を得るステップと、
前記目標電圧に基づいて、前記出力電力特性曲線で前記第1最大電力点を決定するステップと、を含むことを特徴とする請求項3に記載の方法。
【請求項5】
前記第2電力と前記第1電力とを比較した後、
前記第2電力が前記第1電力よりも小さい場合、前記電圧-電流特性曲線、前記最大探索電圧及び前記第2電流に基づいて前記ソーラーアレイの第1最大電力を決定するステップと、
前記第1最大電力と前記第1電力とを比較するステップと、
前記第1最大電力が前記第1電力よりも大きい場合、前記探索ステップサイズに基づいて前記第1電圧を更新し、前記ソーラーアレイの更新後の第2電圧及び第2電流を取得するステップ~前記目標電圧に基づいて、前記出力電力特性曲線で前記第1最大電力点を決定するステップを繰り返すステップと、
前記第1最大電力が前記第1電力以下である場合、前記第2電力が前記第1電力に等しいか否かを判断するステップと、
前記第2電力が前記第1電力に等しい場合、前記第2電力に対応する電力点を前記第1最大電力点とするステップと、をさらに含むことを特徴とする請求項4に記載の方法。
【請求項6】
前記第1最大電力点に基づいて、粒子群アルゴリズム処理を行い、前記ソーラーアレイの目標最大電力点を得るステップは、
前記第1最大電力点に基づいて、前記出力電力特性曲線で前記ソーラーアレイの第3電圧を決定するステップと、
前記第3電圧に基づいて、各粒子の初期化電圧を決定するステップと、
各前記粒子の前記初期化電圧に基づいて、各前記粒子の第1探索電力を計算するステップと、
各前記第1探索電力に基づいて前記ソーラーアレイの第2最大電力及び第3最大電力を決定するステップと、
各前記粒子の位置及び速度を更新し、第2最大電力が第3最大電力に等しいか否かを判断するステップと、
前記第2最大電力が前記第3最大電力に等しい場合、前記ソーラーアレイの第4電圧及び第3電流を取得するステップと、
前記第4電圧及び前記第3電流に基づいて、前記ソーラーアレイの第3電力を決定するステップと、
前記第3電力が所定の電力範囲を満たすか否かを判断するステップと、
前記第3電力が前記所定の電力範囲を満たす場合、前記第2最大電力に対応する電力点を前記目標最大電力点とするステップと、を含むことを特徴とする請求項1に記載の方法。
【請求項7】
各前記粒子の位置及び速度を更新し、前記第2最大電力が前記第3最大電力に等しいか否かを判断するステップの後、
前記第2最大電力が前記第3最大電力に等しくない場合、更新後の各前記粒子に基づいて、各前記粒子の前記初期化電圧に基づいて、各前記粒子の第1探索電力を計算するステップ~前記第3電力が前記所定の電力範囲を満たす場合、前記第2最大電力に対応する電力点を前記目標最大電力点とするステップを繰り返すステップをさらに含むことを特徴とする請求項6に記載の方法。
【請求項8】
ソーラーアレイ出力特性に基づく最大電力点追踪装置であって、
前記ソーラーアレイはソーラーモジュールを含み、
前記ソーラーアレイの出力電圧、出力電流及び前記ソーラーモジュールの第1開回路電圧を取得するための取得モジュールと、
前記出力電圧及び前記出力電流に基づいて、前記ソーラーアレイの電圧-電流特性曲線及び出力電力特性曲線を決定するための決定モジュールと、
前記第1開回路電圧を探索ステップサイズとして、前記電圧-電流特性曲線及び前記出力電力特性曲線の局所的な最良点が前記第1開回路電圧を基準量として均等に分布するという分布原理を利用して、前記出力電力特性曲線で探索を行い、第1最大電力点を得るための探索モジュールと、
前記第1最大電力点に基づいて、粒子群アルゴリズム処理を行い、前記ソーラーアレイの目標最大電力点を得るための処理モジュールと、を含むことを特徴とするソーラーアレイ出力特性に基づく最大電力点追踪装置。
【請求項9】
請求項1~7のいずれか1項に記載のソーラーアレイ出力特性に基づく最大電力点追従方法をコンピュータに実行させるためのコンピュータ命令が記憶されていることを特徴とするコンピュータ可読記憶媒体。
【請求項10】
互いに通信可能に接続されたメモリとプロセッサを含み、前記メモリにはコンピュータプログラムが記憶され、前記プロセッサは、前記コンピュータプログラムを実行することにより、請求項1~7のいずれか1項に記載のソーラーアレイ出力特性に基づく最大電力点追従方法を実行することを特徴とする電子機器。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ソーラーアレイの技術分野に関し、具体的には、ソーラーアレイの出力特性に基づく最大電力点追従方法、及び装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
ソーラーアレイはソーラー発電システムのエネルギー変換ユニットとして、ソーラー発電の技術分野の研究課題の一つである。ソーラーアレイのP-V出力は複雑な非線形特性を有し、温度や光照射強度などの外部環境の影響を受ける。ソーラーアレイの表層へ光が均一に照射すると、そのP-V出力は単峰特性を呈し、P-V曲線にはグローバルな最大電力点が存在する。ソーラーアレイの表層への光照射が均一ではなく、例えばソーラーアレイが落葉や黒雲などの物体に遮られ、ソーラーアレイの表層に影が存在すると、ソーラーアレイのP-V出力が多峰特性を呈し、P-V曲線にはいくつかの局所的な最大電力点が存在する。実際の応用には、ソーラーシステムは、対応する制御方法を通じて、ソーラーアレイが常に最大電力を出力するようにし、ソーラーシステムの効率を高める必要があり、上記の制御過程は最大電力点追従(MPPT)である。
【0003】
従来の最大電力点追従(MPPT)方法の多くは、複雑な数学方法を利用したり、深層学習などを組み合わせたりするため、実現が難しく、実現過程が複雑で、実際に応用されることが難しい。また、ほとんどの方法は、完全なP-U特性曲線をスキャンする必要があり、探索速度が遅い。
【発明の概要】
【発明が解決しようとする課題】
【0004】
これに鑑みて、本発明の実施例は、従来技術における最大電力点追従の実現の難度が大きくて、実現過程が複雑で、実際に応用されることが難しく、探索速度が遅いという技術的課題を解決するために、ソーラーアレイの出力特性に基づく最大電力点追従方法、及び装置を提供する。
【課題を解決するための手段】
【0005】
本発明に係る技術的解決手段は以下の通りである。
【0006】
第1態様では、本発明の実施例は、ソーラーアレイ出力特性に基づく最大電力点追従方法であって、前記ソーラーアレイはソーラーモジュールを含み、前記ソーラーアレイの出力電圧、出力電流及び前記ソーラーモジュールの第1開回路電圧を取得するステップと、前記出力電圧及び前記出力電流に基づいて、前記ソーラーアレイの電圧-電流特性曲線及び出力電力特性曲線を決定するステップと、前記第1開回路電圧を探索ステップサイズとして、前記電圧-電流特性曲線及び前記出力電力特性曲線の局所的な最良点が前記第1開回路電圧を基準量として均等に分布するという分布原理を利用して、前記出力電力特性曲線で探索を行い、第1最大電力点を得るステップと、前記第1最大電力点に基づいて、粒子群アルゴリズム処理を行い、前記ソーラーアレイの目標最大電力点を得るステップと、を含むソーラーアレイ出力特性に基づく最大電力点追従方法を提供する。
【0007】
第1態様を参照し、第1態様の代替的な実施形態では、前記ソーラーモジュールの第1開回路電圧を取得するステップは、前記ソーラーアレイの第2開回路電圧及び前記ソーラーアレイの直列電池の数を取得するステップと、前記第2開回路電圧及び前記直列電池の数に基づいて、前記第1開回路電圧を決定するステップと、を含む。
【0008】
第1態様を参照し、第1態様の別の代替的な実施形態では、前記第1開回路電圧を探索ステップサイズとして、前記電圧-電流特性曲線及び前記出力電力特性曲線の局所的な最良点が前記第1開回路電圧を基準量として均等に分布するという分布原理を利用して、前記出力電力特性曲線で探索を行い、第1最大電力点を得るステップは、前記第1開回路電圧に基づいて、初期点電圧を決定するステップと、前記初期点電圧、前記第1開回路電圧及び前記直列電池の数に基づいて、最大探索電圧を決定するステップと、前記初期点電圧及び前記最大探索電圧に基づいて探索範囲を決定するステップと、前記探索範囲内で、前記電圧-電流特性曲線に基づいて、前記第1開回路電圧を前記探索ステップサイズとして前記出力電力特性曲線で探索を行い、前記第1最大電力点を得るステップと、を含む。
【0009】
第1態様を参照し、第1態様の又の代替的な実施形態では、前記探索範囲内で、前記電圧-電流特性曲線に基づいて、前記第1開回路電圧を前記探索ステップサイズとして前記出力電力特性曲線で探索を行い、前記第1最大電力点を得るステップは、前記ソーラーアレイの第1電圧を取得するステップと、前記第1電圧に基づいて、前記電圧-電流特性曲線で前記ソーラーアレイの第1電流を決定するステップと、前記第1電圧及び前記第1電流に基づいて、前記ソーラーアレイの第1電力を決定するステップと、前記探索ステップサイズに基づいて前記第1電圧を更新し、前記ソーラーアレイの更新後の第2電圧及び第2電流を取得するステップと、前記第2電圧及び前記第2電流に基づいて、前記ソーラーアレイの第2電力を決定するステップと、前記第2電力と前記第1電力とを比較するステップと、前記第2電力が前記第1電力よりも大きい場合、前記第2電力を利用して前記第1電力を更新するとともに、前記第2電圧を利用して前記第1電圧を更新し、前記第2電圧を反復して前記最大探索電圧にすると反復を停止し、目標電圧を得るステップと、前記目標電圧に基づいて、前記出力電力特性曲線で前記第1最大電力点を決定するステップと、を含む。
【0010】
第1態様を参照し、第1態様の又の代替的な実施形態では、前記第2電力と前記第1電力とを比較した後、前記第2電力が前記第1電力よりも小さい場合、前記電圧-電流特性曲線、前記最大探索電圧及び前記第2電流に基づいて前記ソーラーアレイの第1最大電力を決定するステップと、前記第1最大電力と前記第1電力とを比較するステップと、前記第1最大電力が前記第1電力よりも大きい場合、前記探索ステップサイズに基づいて前記第1電圧を更新し、前記ソーラーアレイの更新後の第2電圧及び第2電流を取得するステップ~前記目標電圧に基づいて、前記出力電力特性曲線で前記第1最大電力点を決定するステップを繰り返すステップと、前記第1最大電力が前記第1電力以下である場合、前記第2電力が前記第1電力に等しいか否かを判断するステップと、前記第2電力が前記第1電力に等しい場合、前記第2電力に対応する電力点を前記第1最大電力点とするステップと、をさらに含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
2か月前
アズビル株式会社
制御装置
1か月前
村田機械株式会社
産業機械
2か月前
トヨタ自動車株式会社
自律移動体
2か月前
コフロック株式会社
流量制御装置
1か月前
和研工業株式会社
多連レバー機構
7日前
株式会社丸和製作所
入力機器
1か月前
スター精密株式会社
工作機械
23日前
株式会社クボタ
作業車
2か月前
株式会社明電舎
車両
2か月前
株式会社フジキン
流量制御装置
1か月前
ローム株式会社
半導体集積回路
2日前
株式会社豊田自動織機
荷役車両
1か月前
株式会社村田製作所
温度補償回路
2か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
ロボットシステム
2か月前
株式会社シンテックホズミ
搬送ロボット
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
2か月前
国立大学法人広島大学
モデル誤差抑制補償器
28日前
愛知機械テクノシステム株式会社
無人搬送車
16日前
アズビル株式会社
制御システムおよび制御方法
8日前
アズビル株式会社
制御システムおよび制御方法
8日前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
アズビル株式会社
制御システムおよび制御方法
17日前
旭精機工業株式会社
監視データ処理装置
2か月前
ブラザー工業株式会社
数値制御装置及び工作機械
2か月前
日本精工株式会社
制御装置および制御方法
14日前
トヨタ自動車株式会社
自律走行装置
28日前
チームラボ株式会社
走行システム及び走行路
21日前
村田機械株式会社
稼働監視システム及び稼働監視方法
17日前
ミツミ電機株式会社
電源回路及びその起動方法
28日前
トヨタ自動車株式会社
群制御システム及び群制御方法
16日前
ローム株式会社
半導体装置
28日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































