TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025040750
公報種別
公開特許公報(A)
公開日
2025-03-25
出願番号
2023147745
出願日
2023-09-12
発明の名称
ロボットハンド
出願人
株式会社カナデビアエンジニアリング
代理人
弁理士法人アイミー国際特許事務所
主分類
B25J
15/08 20060101AFI20250317BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】エアホースや電気配線の設置が不要なロボットハンドを提供する。
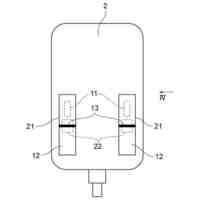
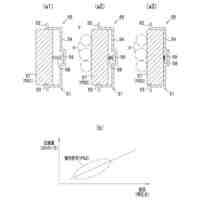
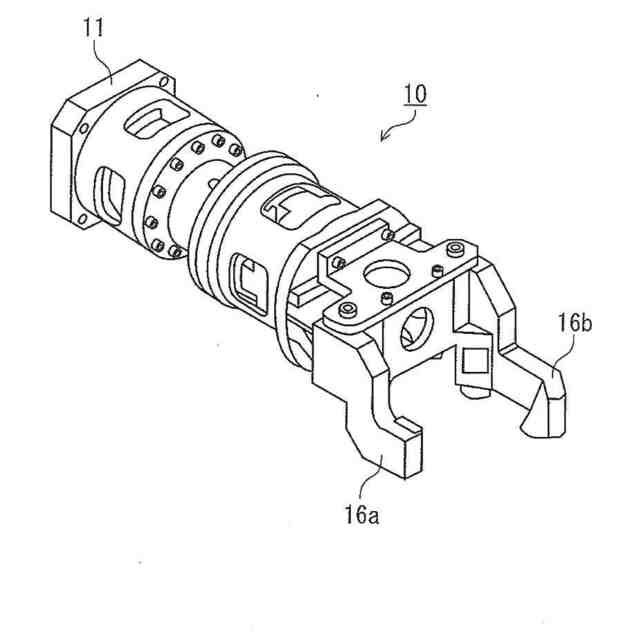
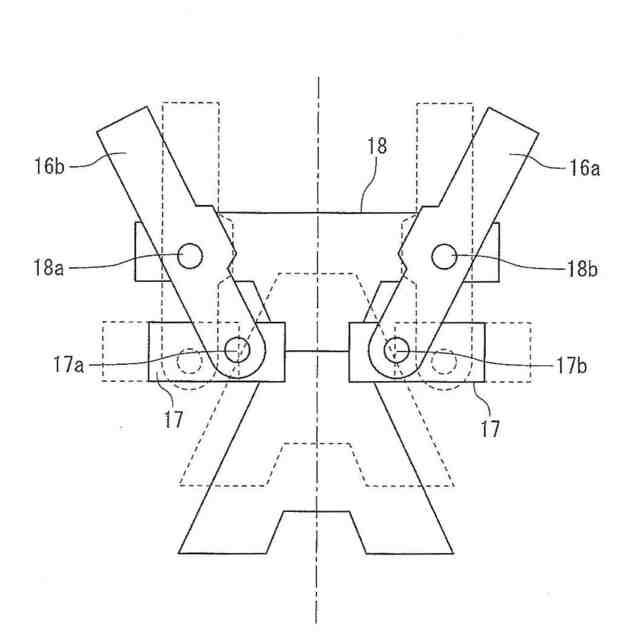
【解決手段】ロボットハンド10は、6軸を有する産業用ロボットの先端の手首回転を使用して、ワークを保持するクランプアーム16a,16bを有し、手首回転のための可動範囲の内の一部のみを用いて一方向に回転することで、クランプアーム16a,16bを閉じてワーク19を保持し、可動範囲の内の一部のみを用いて逆回転することでクランプアーム16a,16bを開いてワーク19を解放する。
【選択図】図1
特許請求の範囲
【請求項1】
6軸を有する産業用ロボットの先端の手首回転を使用するロボットハンドであって、
ワークを保持するクランプアームを有し、手首回転のための可動範囲の内の一部のみを用いて一方向に回転することで、前記クランプアームを閉じてワークを保持し、可動範囲の内の一部のみを用いて逆回転することで前記クランプアームを開いてワークを解放する、ロボットハンド。
続きを表示(約 320 文字)
【請求項2】
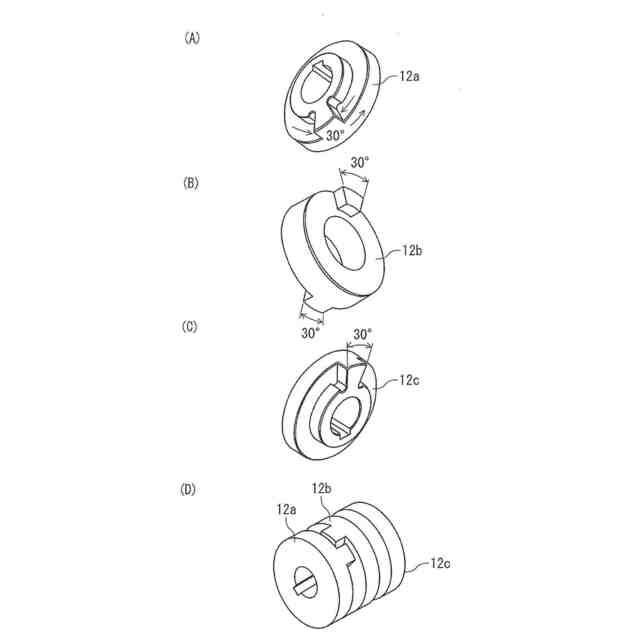
前記可動範囲は右回転方向360°で、且つ左回転方向360°であり、合計720°であり、前記クランプアームを開閉する角度は、120°である、請求項1に記載のロボットハンド。
【請求項3】
前記クランプアームは、クサビ機構によって開閉され、それによってワークの保持、および解放を行う、請求項1に記載のロボットハンド。
【請求項4】
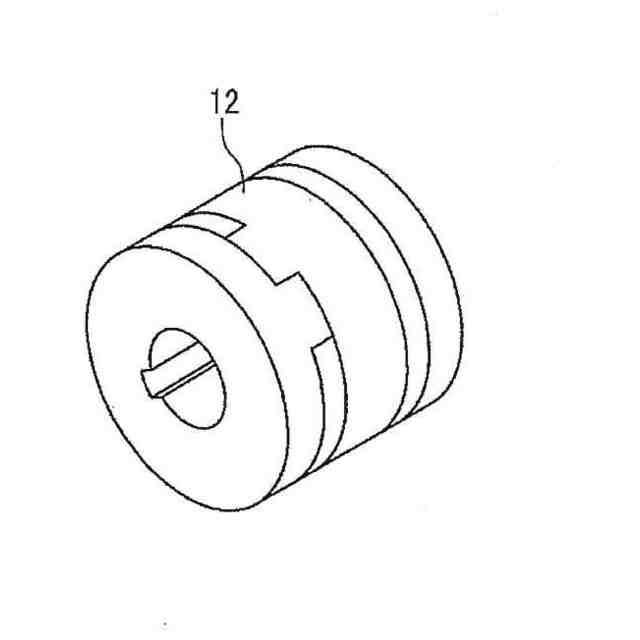
前記ロボットハンドは、チェンジナット、および前記チェンジナットによって圧縮可能なコイルバネを含み、
前記チェンジナットを移動して前記コイルバネを圧縮し、前記クサビ機構により前記クランプアームを閉じてワークを保持する、請求項3に記載のロボットハンド。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワークを保持するロボットハンドに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
ロボットハンドに取付けられ、ワークを保持するワーク保持装置が例えば特開2009-297886号公報(特許文献1)に開示されている。同公報によれば、ワーク保持装置は、シリンダーの駆動によりシリンダー軸心の上下方向へ往復移動可能に設けられた筒体と、シリンダーの軸心と同心に設けられ筒体の軸心方向の移をガイドする案内軸と、本体の外方に設けられ爪部の一部を回転可能に支持するブラケット部材と、爪部と筒体を夫々回転可能に連結するリンク部材を備え、爪部がブラケット部材との支持部位を回転中心として回転移動しワークを把持する。
【先行技術文献】
【特許文献】
【0003】
特開2009-297886号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の、ロボットハンドに取付けられ、ワークを保持するワーク保持装置は上記の様に構成されていた。従来のワーク保持装置では主にエアシリンダや電動シリンダを使用している。このため、エアホースや電気配線の設置が必要となり、それらの断線、破損による設備の停止が頻繁に発生するという問題があった。
【0005】
この発明は上記のような問題点を解消するためになされたもので、エアホースや電気配線の設置が不要なロボットハンドを提供することを目的とする。
【課題を解決するための手段】
【0006】
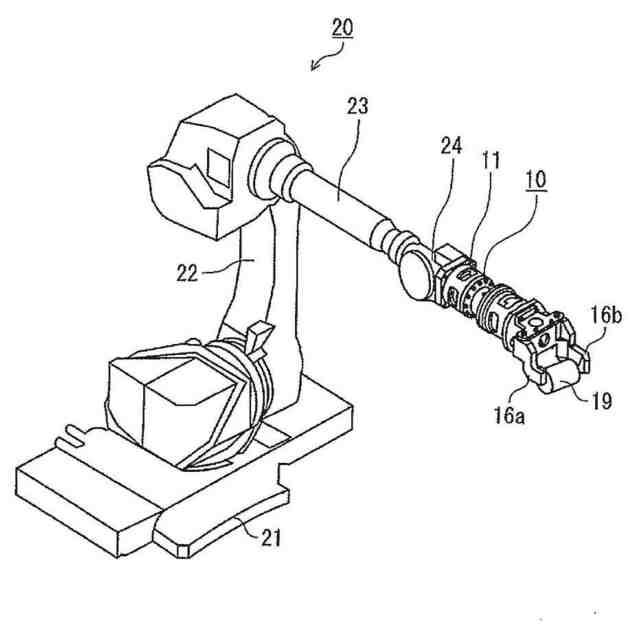
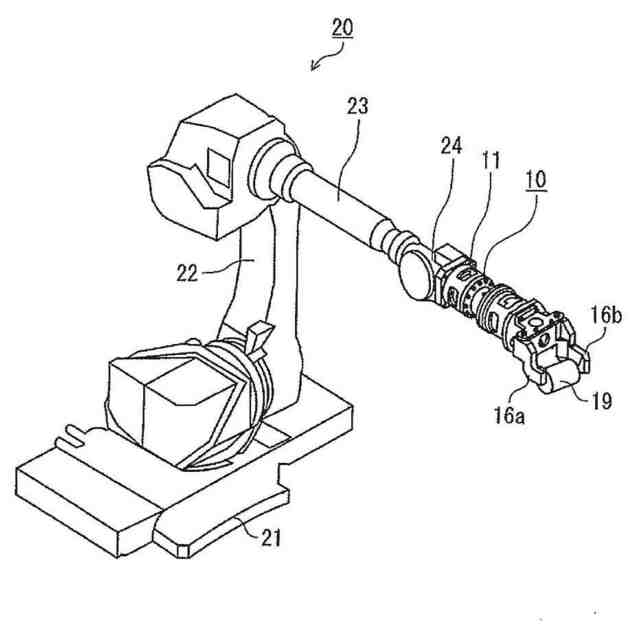
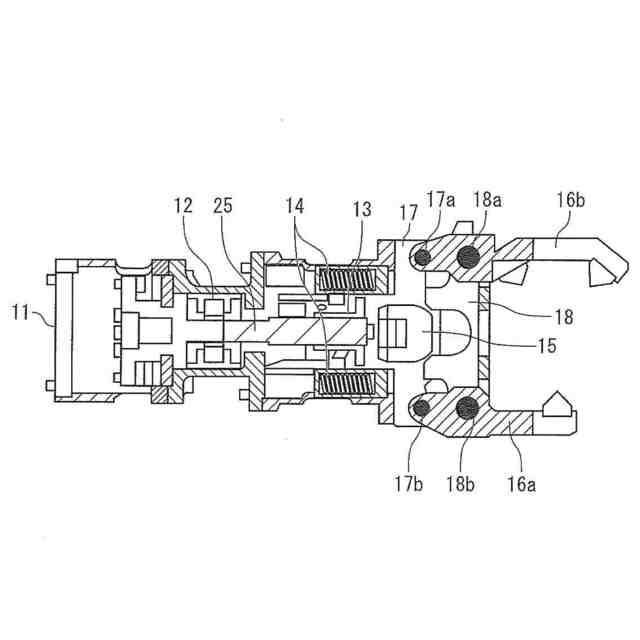
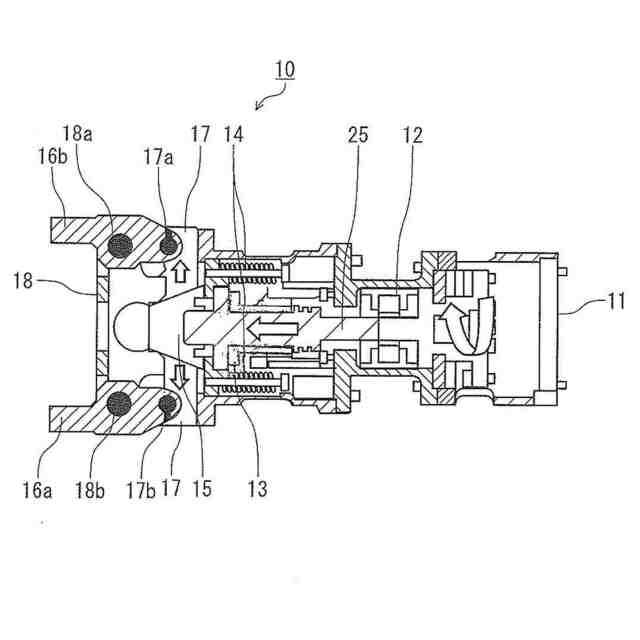
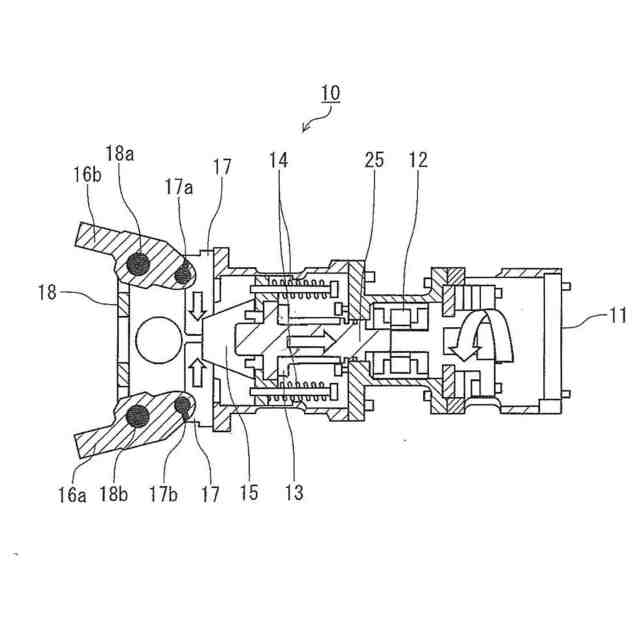
本発明に係るロボットハンドは、6軸を有する産業用ロボットの先端の手首回転を使用する。ワークを保持するクランプアームを有し、手首回転のための可動範囲の内の一部のみを用いて一方向に回転することで、クランプアームを閉じてワークを保持し、可動範囲の内の一部のみを用いて逆回転することで前記クランプアームを開いてワークを解放する。
【0007】
可動範囲は右回転方向360°で、且つ左回転方向360°であり、合計720°であり、そのクランプアームを開閉する角度は、120°である。
【0008】
クランプアームは、クサビ機構によって開閉され、それによってワークの保持、および解放を行う。
【0009】
ロボットハンドはチェンジナットおよびチェンジナットによって圧縮可能なコイルバネを含み、チェンジナットを移動してコイルバネを圧縮し、クサビ機構によりクランプアームを閉じてワークを保持する。
【発明の効果】
【0010】
本発明によれば、手首回転のための可動範囲の内の一部のみを用いて一方向に回転することで、クランプアームを閉じてワークを保持し、可動範囲の内の一部のみを用いて逆回転することでクランプアームを開いてワークを解放するため、エアホースや電気配線の設置が不要なワークを保持するロボットハンドを提供できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイセイ
搬送装置
28日前
川崎重工業株式会社
ハンド
22日前
個人
けがき用治具
16日前
株式会社不二越
ロボット
14日前
個人
深孔スリーブ駆動ロッド構造
6日前
株式会社不二越
ロボット操作装置
13日前
川崎重工業株式会社
ロボット
14日前
個人
バール
6日前
株式会社黒澤鉄工製作所
けがき用治具
16日前
株式会社デンソー
操縦桿
14日前
工機ホールディングス株式会社
作業機
1日前
川崎重工業株式会社
ロボットシステム
22日前
梅馨堂合同会社
人協働ロボットシステム
8日前
ARMA株式会社
UI付エンドエフェクタ
9日前
株式会社不二越
基板搬送用ロボット
23日前
学校法人法政大学
装着型アシスト装置
3日前
若井ホールディングス株式会社
レンチ構造とその製造方法
16日前
株式会社マキタ
電動工具
28日前
株式会社マキタ
電動工具
28日前
株式会社マキタ
作業機
13日前
三菱電機株式会社
トルク締め個所検出システム
6日前
高丸工業株式会社
ロボット操作システムの動作方法
6日前
シブヤパッケージングシステム株式会社
物品移載装置
14日前
株式会社不二越
ロボットの教示システム及び教示方法
今日
中国電力株式会社
電動ドライバー
今日
株式会社不二越
通信端末装置及びロボット制御システム
27日前
株式会社デンソー
作業装置および作業プログラム
14日前
株式会社デンソー
解体装置および解体プログラム
14日前
株式会社ベッセル工業
インパクト工具
14日前
JUKI株式会社
ハンドリング装置
8日前
オムロン株式会社
モバイルロボット
今日
不二空機株式会社
エアツール及びエアツールの使用方法
22日前
オムロン株式会社
モバイルロボット
今日
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
今日
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
今日
学校法人 名古屋電気学園
制御システム
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ