TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025040545
公報種別
公開特許公報(A)
公開日
2025-03-25
出願番号
2023147402
出願日
2023-09-12
発明の名称
管理システム
出願人
井関農機株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A01B
69/00 20060101AFI20250317BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】モニタの表示画面において特定の圃場の2つの圃場形状の照合を自動で行うことが可能となり、作業性を向上させることができる管理システムを提供すること。
【解決手段】実施形態に係る管理システムは、農業機械と、制御装置と、モニタとを備える。農業機械は、圃場内で作業を行う。制御装置は、特定の圃場を含む第1マップ情報を取得し、営農管理ソフトが有する特定の圃場を含む第2マップ情報を取得し、第1マップ情報および第2マップ情報のそれぞれの特定の圃場を照合する。モニタは、第1マップ情報および第2マップ情報を表示可能である。制御装置は、第1マップ情報の特定の圃場の重心位置を第1重心位置として登録し、第2マップ情報の特定の圃場の重心位置を第2重心位置として登録し、モニタの表示画面において、第1重心位置および第2重心位置が合致するように第1マップ情報および第2マップ情報のそれぞれの特定の圃場を照合する。
【選択図】図2
特許請求の範囲
【請求項1】
圃場内で作業を行う農業機械と、
前記農業機械の作業対象となる特定の圃場を含む第1マップ情報を取得し、営農管理ソフトが有する前記特定の圃場を含む第2マップ情報を取得し、前記第1マップ情報および前記第2マップ情報のそれぞれの前記特定の圃場を照合する制御装置と、
前記第1マップ情報および前記第2マップ情報を表示可能なモニタと
を備え、
前記制御装置は、
前記第1マップ情報の前記特定の圃場の重心位置を第1重心位置として登録し、
前記第2マップ情報の前記特定の圃場の重心位置を第2重心位置として登録し、
前記モニタの表示画面において、前記第1重心位置および前記第2重心位置が合致するように前記第1マップ情報および前記第2マップ情報のそれぞれの前記特定の圃場を照合する
ことを特徴とする管理システム。
続きを表示(約 840 文字)
【請求項2】
前記制御装置は、
前記第1マップ情報および前記第2マップ情報のそれぞれの前記特定の圃場を照合した後、前記第1マップ情報および前記第2マップ情報のそれぞれの前記特定の圃場の面積を照合し、
前記第1マップ情報および前記第2マップ情報のそれぞれの前記特定の圃場の面積の合致率が所定の値以下の場合には、前記第1マップ情報および前記第2マップ情報の少なくともいずれかをそれぞれの前記重心位置を中心として所定の角度ごとに回転し、最も合致率の高い回転角度で照合する
ことを特徴とする請求項1に記載の管理システム。
【請求項3】
前記制御装置は、
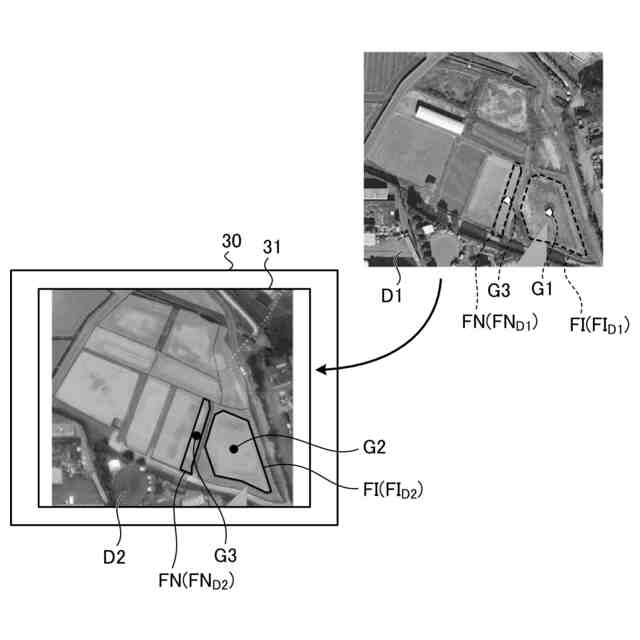
前記第1マップ情報の前記特定の圃場と隣接する隣接圃場の重心位置を第3重心位置として登録し、
前記第2マップ情報の前記特定の圃場と隣接する前記隣接圃場の重心位置を第4重心位置として登録し、
前記第1マップ情報および前記第2マップ情報のそれぞれの前記特定の圃場を照合した後、前記第3重心位置および前記第4重心位置が合致するように前記第1マップ情報および前記第2マップ情報のそれぞれの前記隣接圃場を照合する
ことを特徴とする請求項1または2に記載の管理システム。
【請求項4】
前記制御装置は、
前記第3重心位置および前記第4重心位置の合致率が所定の値以下の場合には、前記第1マップ情報および前記第2マップ情報のそれぞれの前記特定の圃場の外周形状を照合し、
さらに、前記第1マップ情報および前記第2マップ情報のそれぞれの前記外周形状が合致しない場合には、前記第3重心位置および前記第4重心位置が合致するように前記第1マップ情報および前記第2マップ情報のそれぞれの前記隣接圃場を再度照合しつつ、前記第1マップ情報および前記第2マップ情報のそれぞれの前記外周形状を再度照合する、
ことを特徴とする請求項3に記載の管理システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、管理システムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、農業機械が位置する圃場識別情報と特定の圃場の位置情報とを照合してモニタに表示される圃場識別情報が有する特定の圃場の圃場位置情報を表示するとともに、特定の圃場における圃場の形状などの情報を表示する技術が知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2010-104292号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のような従来技術では、圃場識別情報と特定の圃場の位置情報とを照合するものの、モニタに表示されるマップ情報(以下、単に「マップ」ともいう)上で互いの圃場の形状情報(以下、単に「圃場形状」ともいう)を照合するものではないため、たとえば、圃場をメッシュ化するような照合はできない。
【0005】
また、たとえば、ICT(Information and Communication Technology:情報通信技術)ベンダなどが運営する営農管理ソフトを用いて、GIS(Geographic Information System:地理情報システム)から受信したマップと営農管理ソフトが有するマップとを照合して特定の圃場における作業管理を行う。営農管理ソフトを用いる場合、モニタに表示されるマップ上で2つの圃場形状の照合が可能であるが、作業者が手動で行う必要があり、作業が煩雑となることがある。
【0006】
本発明は、上記に鑑みてなされたものであって、モニタの表示画面において特定の圃場の2つの圃場形状の照合を自動で行うことが可能となり、作業性を向上させることができる管理システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
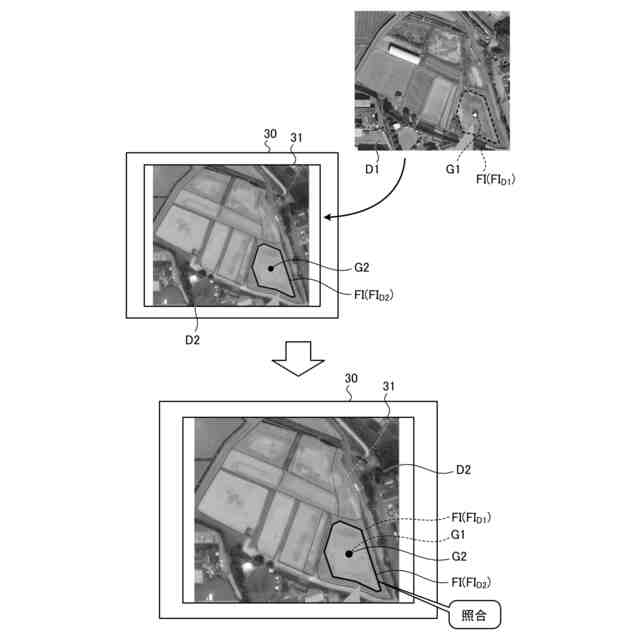
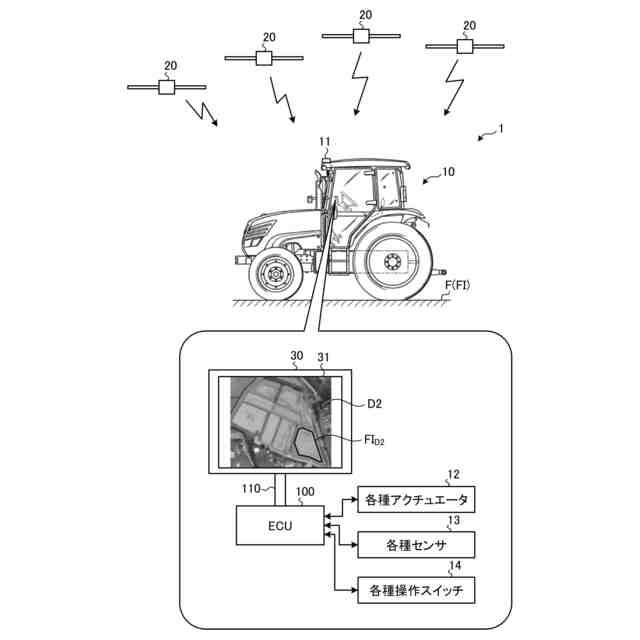
上述した課題を解決し、目的を達成するために、実施形態に係る管理システム(1)は、圃場(F)内で作業を行う農業機械(10)と、前記農業機械(10)の作業対象となる特定の圃場(FI
D1
)を含む第1マップ情報(D1)を取得し、営農管理ソフトが有する前記特定の圃場(FI
D2
)を含む第2マップ情報(D2)を取得し、前記第1マップ情報(D1)および前記第2マップ情報(D2)のそれぞれの前記特定の圃場(FI
D1
,FI
D2
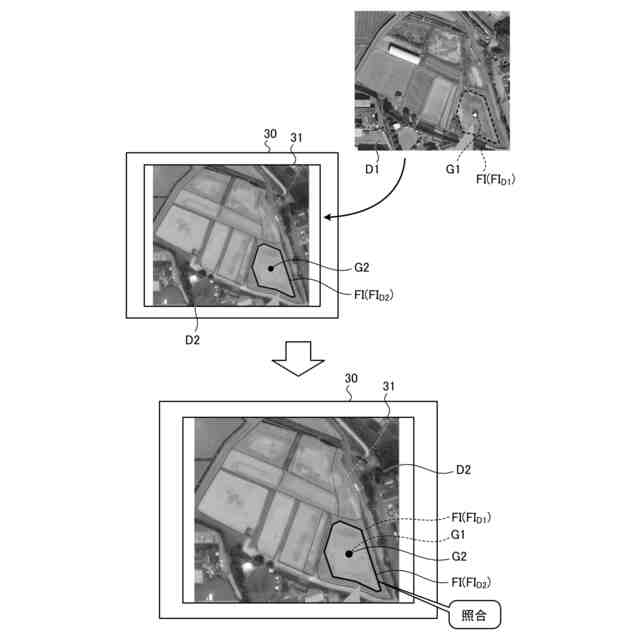
)を照合する制御装置(100)と、前記第1マップ情報(D1)および前記第2マップ情報(D2)を表示可能なモニタ(30)とを備え、前記制御装置(100)は、前記第1マップ情報(D1)の前記特定の圃場(FI
D1
)の重心位置を第1重心位置(G1)として登録し、前記第2マップ情報(D2)の前記特定の圃場(FI
D2
)の重心位置を第2重心位置(G2)として登録し、前記モニタ(30)の表示画面(31)において、前記第1重心位置(G1)および前記第2重心位置(G2)が合致するように前記第1マップ情報(D1)および前記第2マップ情報(D2)のそれぞれの前記特定の圃場(FI
D1
,FI
D2
)を照合することを特徴とする。
【発明の効果】
【0008】
実施形態に係る管理システムによれば、モニタの表示画面において特定の圃場の2つの圃場形状の照合を自動で行うことが可能となり、作業性を向上させることができる。
【図面の簡単な説明】
【0009】
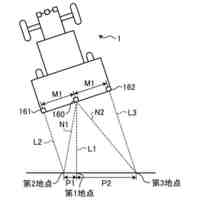
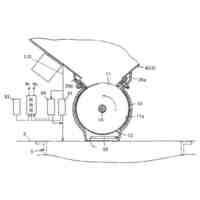
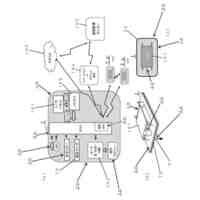
図1は、実施形態に係る管理システムの概要を示す図である。
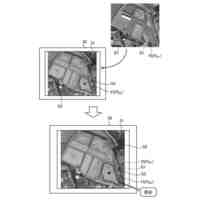
図2は、実施形態に係る管理システムの制御装置における照合処理の説明図(その1)である。
図3は、実施形態に係る管理システムの制御装置における照合処理の説明図(その2)である。
図4は、実施形態に係る管理システムの制御装置における照合処理の説明図(その3)である。
図5は、実施形態に係る管理システムの制御装置における照合処理の説明図(その4)である。
図6は、制御装置においてマップ情報を取得するための構成の説明図である。
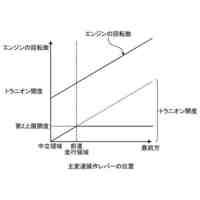
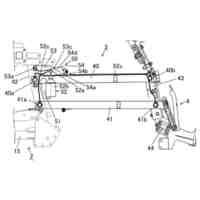
図7は、制御装置におけるコンバインの自動引き起こしラグ制御の説明図(その1)である。
図8は、制御装置におけるコンバインの自動引き起こしラグ制御の説明図(その2)である。
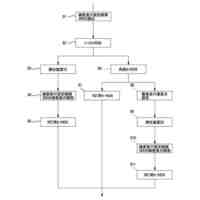
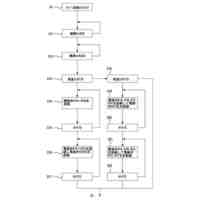
図9は、制御装置におけるコンバインの自動引き起こしラグ制御の処理手順の一例を示すフローチャートである。
図10は、メッシュビーコンを用いたエリアマッピングの説明図(その1)である。
図11は、メッシュビーコンを用いたエリアマッピングの説明図(その2)である。
図12は、メッシュビーコンを用いたエリアマッピングの説明図(その3)である。
図13は、メッシュビーコンを用いたエリアマッピングの説明図(その4)である。
図14は、メッシュビーコンを用いたエリアマッピングの説明図(その5)である。
図15は、メッシュビーコンを用いたエリアマッピングの説明図(その6)である。
図16は、メッシュビーコンを用いたエリアマッピングの説明図(その7)である。
図17は、メッシュビーコンを用いたエリアマッピングの説明図(その8)である。
図18は、メッシュビーコンを用いたエリアマッピングの説明図(その9)である。
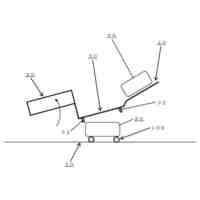
図19は、圃場センサを用いた自動運転制御の説明図(その1)である。
図20は、圃場センサを用いた自動運転制御の説明図(その2)である。
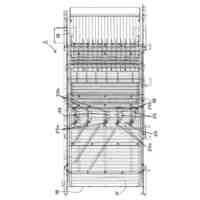
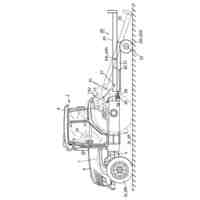
図21は、圃場の傾斜情報取得構成の説明図(その1)である。
図22は、圃場の傾斜情報取得構成の説明図(その2)である。
図23は、圃場の傾斜情報取得構成の説明図(その3)である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して本願の開示する管理システムの実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
24日前
井関農機株式会社
田植機
1か月前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
苗移植機
5日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
精米設備
24日前
井関農機株式会社
防除作業車
1か月前
井関農機株式会社
コンバイン
24日前
井関農機株式会社
コンバイン
3日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
苗補給装置
1か月前
井関農機株式会社
コンバイン
4日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
洗米炊飯装置
24日前
井関農機株式会社
乗用型作業機
23日前
井関農機株式会社
管理システム
12日前
井関農機株式会社
乗用型苗移植機
24日前
井関農機株式会社
運搬用トレーラ
23日前
井関農機株式会社
乗用型苗移植機
12日前
井関農機株式会社
雑草発生抑制機
4日前
井関農機株式会社
水田除草システム
24日前
井関農機株式会社
尿素水供給システム
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ