TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025029393
公報種別
公開特許公報(A)
公開日
2025-03-06
出願番号
2023134001
出願日
2023-08-21
発明の名称
作業車両
出願人
井関農機株式会社
代理人
弁理士法人永井国際特許事務所
主分類
A01B
69/00 20060101AFI20250227BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】原動機に過度の負荷が加わるのを防止して、原動機がオーバヒートするのを抑制した作業車両を提供する。
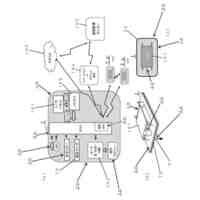
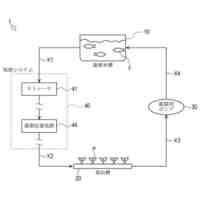
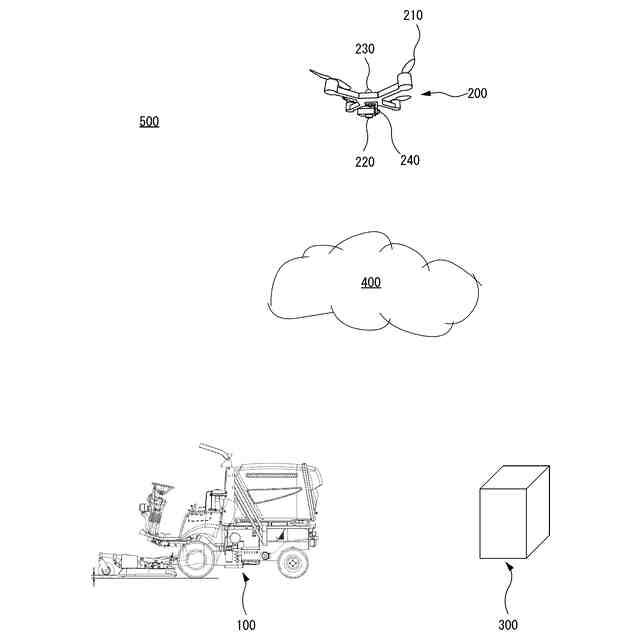
【解決手段】原動機(E)と前輪(2)の間の伝達経路に、原動機(E)の出力回転を増減速する無段変速装置(42)を設け、操縦部(5)に、前輪(2)を自動操舵するコントローラ(60)を設け、コントローラ(60)は、操縦部(5)の後側に配置された測位装置(32)が受信した走行位置情報に基づいて、作業車両を自動操舵しながら走行させる設定経路(72)を設定し、コントローラ(60)は、設定経路(72)上に芝草の疎密度を重ねた疎密度付設定経路(390)を受信し、疎密度付設定経路(390)の芝草の疎密度に基づいて、無段変速装置(42)を操作して作業車両の走行速度を増減速させる構成とした。
【選択図】図13
特許請求の範囲
【請求項1】
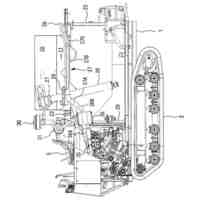
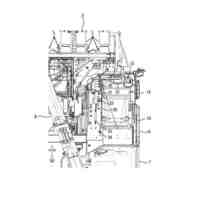
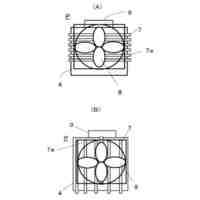
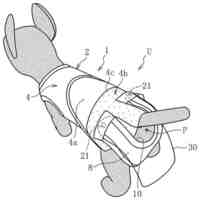
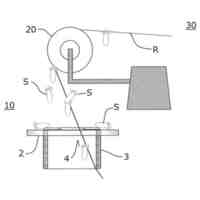
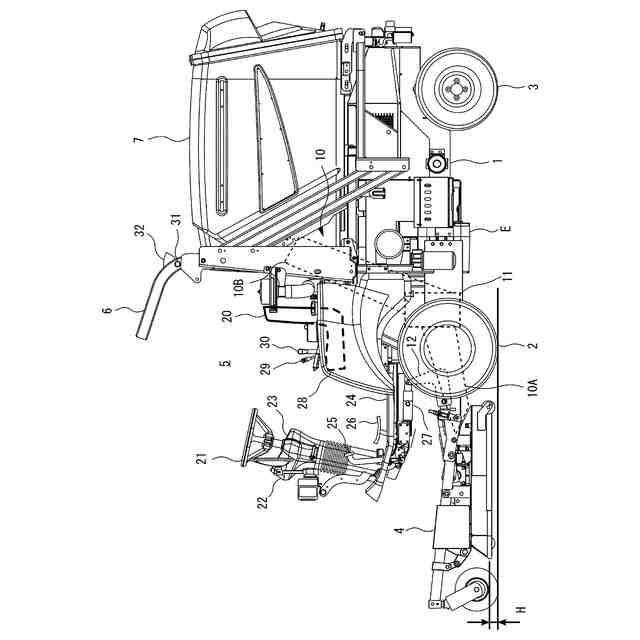
原動機(E)を搭載する機体フレーム(1)の下側に左右一対の前輪(2)と後輪(3)を設け、該機体フレーム(1)の前側に芝草を刈取る草刈装置(4)を設け、前記機体フレーム(1)の上側に作業者が搭乗する操縦部(5)を設けた作業車両において、
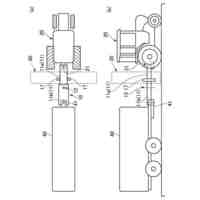
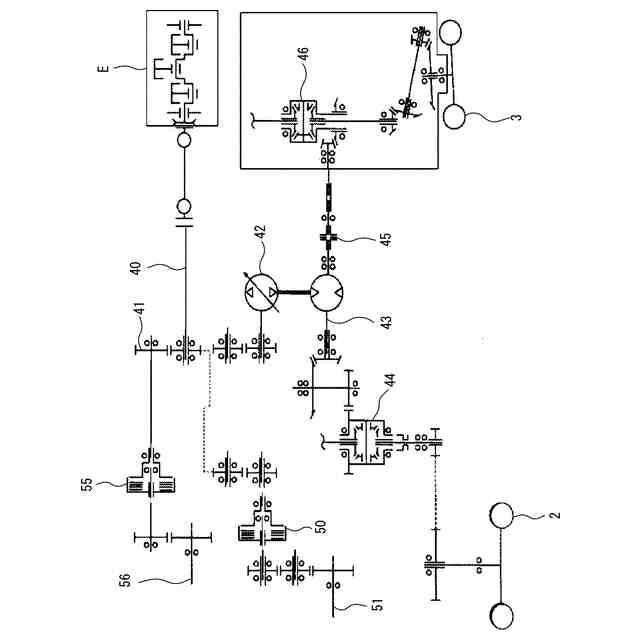
前記原動機(E)と前輪(2)の間の伝達経路に、前記原動機(E)の出力回転を増減速する無段変速装置(42)を設け、
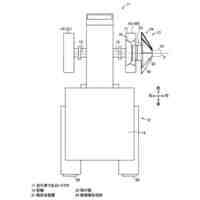
前記操縦部(5)に、前記前輪(2)を自動操舵するコントローラ(60)を設け、
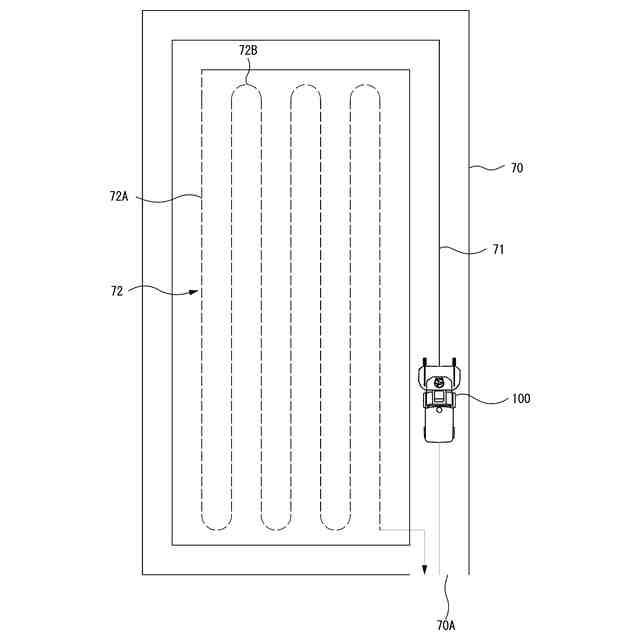
該コントローラ(60)は、前記操縦部(5)の後側に配置された測位装置(32)が受信した走行位置情報に基づいて、前記作業車両を自動操舵しながら走行させる設定経路(72)を設定し、
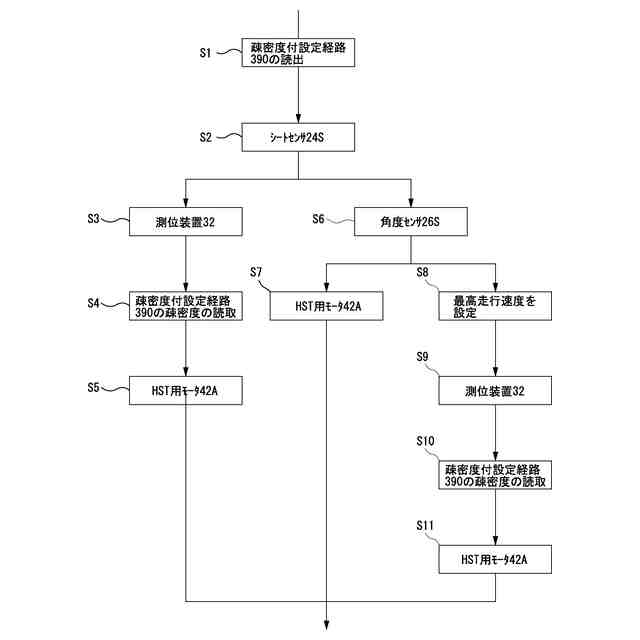
前記コントローラ(60)は、前記設定経路(72)上に芝草の疎密度を重ねた疎密度付設定経路(390)を受信し、該疎密度付設定経路(390)の芝草の疎密度に基づいて、前記無段変速装置(42)を操作して作業車両の走行速度を増減速させる構成としたことを特徴とする作業車両。
続きを表示(約 470 文字)
【請求項2】
前記コントローラ(60)は、前記無段変速装置(42)を操作して走行速度を階段状に増減速させる請求項1記載の作業車両。
【請求項3】
前記コントローラ(60)は、前記操縦部(5)に作業者が搭乗し、且つ、前記操縦部の変速ペダル(26)が踏込まれている場合には、前記走行速度の増減速を中止する請求項1又は2記載の作業車両。
【請求項4】
前記コントローラ(60)は、前記操縦部(5)に作業者が搭乗し、且つ、前記操縦部の変速ペダル(26)が踏込まれていない場合には、前記走行速度の増減速をランプ状に経過時間に伴って緩やかに行う請求項1又は2記載の作業車両。
【請求項5】
前記コントローラ(60)は、前記作業車両の最高走行速度を、前記変速ペダル(26)が最も踏込まれた走行速度よりも低速に設定する請求項4記載の作業車両。
【請求項6】
前記コントローラ(60)は、前記設定経路(72)と走行速度から芝草の刈取作業時間を予め算出する請求項5記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、芝草の疎密度に応じて走行速度の増減速を行う作業車両に関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、作業車両に設けられたカメラで検出された芝草に応じて、作業車両を自動操舵して走行方向を変えながら芝草を刈取っていく技術が知られている。(特許文献1)
【先行技術文献】
【特許文献】
【0003】
特開2021-101619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
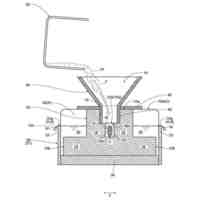
しかし、芝草の疎密度に応じで作業車両の草刈装置に加わる負荷は大きく変動、すなわち、芝草の疎密度が高いと草刈装置に加わる負荷は大きくなり、芝草の疎密度が低いと草刈装置に加わる負荷は小さくなることから、芝草の疎密度が高い区画を作業車両を同一走行速度で走行させると草刈装置に回転出力を伝動する原動機に過度の負荷が加わり原動機がオーバヒートしたり、刈取った芝草がシュータ内に詰まる恐れがあった。
【0005】
そこで、本発明は、原動機に過度の負荷が加わるのを防止して、原動機がオーバヒートするのを抑制した作業車両を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決した本発明は次のとおりである。
すなわち、請求項1記載の発明は、原動機(E)を搭載する機体フレーム(1)の下側に左右一対の前輪(2)と後輪(3)を設け、該機体フレーム(1)の前側に芝草を刈取る草刈装置(4)を設け、前記機体フレーム(1)の上側に作業者が搭乗する操縦部(5)を設けた作業車両において、
前記原動機(E)と前輪(2)の間の伝達経路に、前記原動機(E)の出力回転を増減速する無段変速装置(42)を設け、前記操縦部(5)に、前記前輪(2)を自動操舵するコントローラ(60)を設け、該コントローラ(60)は、前記操縦部(5)の後側に配置された測位装置(32)が受信した走行位置情報に基づいて、前記作業車両を自動操舵しながら走行させる設定経路(72)を設定し、前記コントローラ(60)は、前記設定経路(72)上に芝草の疎密度を重ねた疎密度付設定経路(390)を受信し、該疎密度付設定経路(390)の芝草の疎密度に基づいて、前記無段変速装置(42)を操作して作業車両の走行速度を増減速させる構成としたことを特徴とする作業車両である。
【0007】
請求項2記載の発明は、前記コントローラ(60)は、前記無段変速装置(42)を操作して走行速度を階段状に増減速させる請求項1記載の作業車両である。
【0008】
請求項3記載の発明は、前記コントローラ(60)は、前記操縦部(5)に作業者が搭乗し、且つ、前記操縦部の変速ペダル(26)が踏込まれている場合には、前記走行速度の増減速を中止する請求項1又は2記載の作業車両である。
【0009】
請求項4記載の発明は、前記コントローラ(60)は、前記操縦部(5)に作業者が搭乗し、且つ、前記操縦部の変速ペダル(26)が踏込まれていない場合には、前記走行速度の増減速をランプ状に経過時間に伴って緩やかに行う請求項1又は2記載の作業車両である。
【0010】
請求項5記載の発明は、前記コントローラ(60)は、前記作業車両の最高走行速度を、前記変速ペダル(26)が最も踏込まれた走行速度よりも低速に設定する請求項4記載の作業車両である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
苗移植機
6日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
コンバイン
4日前
井関農機株式会社
コンバイン
5日前
井関農機株式会社
雑草発生抑制機
5日前
井関農機株式会社
乗用型苗移植機
13日前
井関農機株式会社
農業支援システム
今日
井関農機株式会社
尿素水供給システム
4日前
井関農機株式会社
圃場作業機
12日前
井関農機株式会社
作業車両
今日
個人
ショベルバケット型スコップ
今日
井関農機株式会社
農業支援システム
今日
三菱マヒンドラ農機株式会社
移植機
3日前
群馬県
節足動物および腹足動物の判定システム
4日前
株式会社クロス・クローバー・ジャパン
保定袋
今日
株式会社神鋼環境ソリューション
供試魚保持装置
3日前
株式会社すとろーはうす
動物用衣服
5日前
株式会社北海コーキ
農耕用牽引車における連結構造
5日前
松山株式会社
畦形成装置及び畦形成システム
3日前
株式会社アンテック
防鳥装置及び防鳥装置の設置方法
3日前
井関農機株式会社
作業車両
4日前
ヤンマーホールディングス株式会社
コンバイン
4日前
個人
唾液採取用装置を用いた哺乳動物の体調判定方法及び装置
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
コンバイン
5日前
大和ハウス工業株式会社
養殖排水の処理システム
3日前
井関農機株式会社
コンバイン
4日前
株式会社浅利研究所
イカ釣り糸案内機構、およびイカ釣り機
今日
井関農機株式会社
雑草発生抑制機
5日前
ソフトバンクグループ株式会社
システム
3日前
ソフトバンクグループ株式会社
システム
3日前
ソフトバンクグループ株式会社
システム
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ