TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025041885
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2024229082,2023155668
出願日
2024-12-25,2021-05-27
発明の名称
圃場作業機
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20250318BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業性を向上させることができる圃場作業機を提供することを目的とする。
【解決手段】
操舵輪を含む走行輪を有し、圃場内を走行可能な走行車体と、前記操舵輪を操舵駆動するステアリング装置と、前記ステアリング装置を制御するとともに、前記走行車体を自律走行させる制御装置とを備え、目標走行経路を走行する自動往復走行を繰り返すことにより対地作業として圃場に農用資材を供給する圃場作業機であって、前記圃場の外周辺のうちの少なくともいずれかの外周辺である辺で前記農用資材の補給が行われ、前記走行車体と離間した位置から前記走行車体の遠隔操作を行うことができる遠隔装置を備え、前記農用資材を補給するために前記走行車体を畦際で自動停止させ、さらに畦に寄せる畦寄せ操作が前記遠隔装置により行えることを特徴とする。
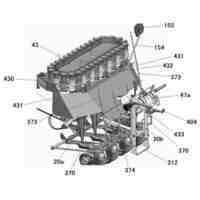
【選択図】図10
特許請求の範囲
【請求項1】
操舵輪を含む走行輪を有し、圃場内を走行可能な走行車体と、
前記操舵輪を操舵駆動するステアリング装置と、
前記ステアリング装置を制御するとともに、前記走行車体を自律走行させる制御装置とを備え、
目標走行経路を走行する自動往復走行を繰り返すことにより対地作業として圃場に農用資材を供給する圃場作業機であって、
前記圃場の外周辺のうちの少なくともいずれかの外周辺である辺で前記農用資材の補給が行われ、前記走行車体と離間した位置から前記走行車体の遠隔操作を行うことができる遠隔装置を備え、前記農用資材を補給するために前記走行車体を畦際で自動停止させ、さらに畦に寄せる畦寄せ操作が前記遠隔装置により行えることを特徴とする圃場作業機。
続きを表示(約 610 文字)
【請求項2】
遠隔操作を行うことができる遠隔装置は、前記制御装置へと操作信号を送信し、
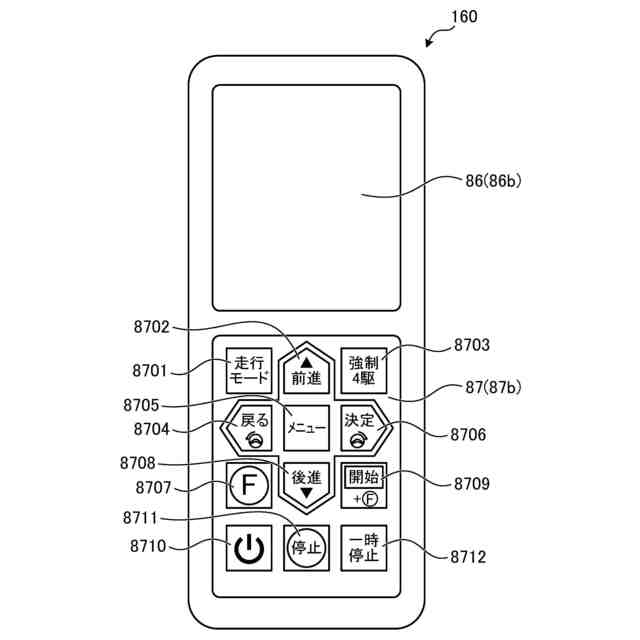
前記遠隔装置からの前記制御装置への操作信号により、前記自律走行による前記走行車体の発進、停止および一時停止、前記自律走行時の前記走行車体の速度調節、前記自律走行時の前記農用資材の供給の入ができることを特徴とする請求項1に記載の圃場作業機。
【請求項3】
圃場内の土壌面を均す整地装置を有し、前記整地装置で均した前記土壌面に農用資材を供給する作業装置を備え、前記自律走行中において、前記遠隔装置からの前記制御装置への操作信号に基づいて前記作業装置を含む各部を作動させることができ、
前記自律走行中において、前記遠隔装置からの前記制御装置への操作信号のうち、前記ステアリング装置に関する操作信号を受け付けず、
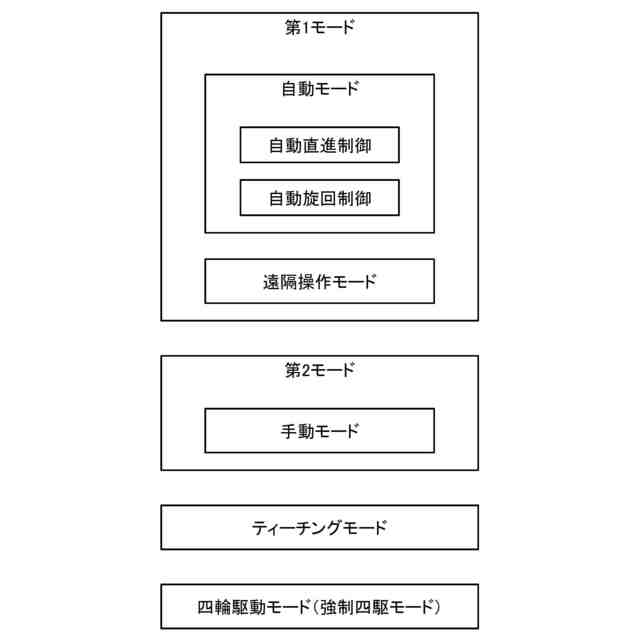
前記制御装置は、操舵操作および変速操作を含む機体操作を作業者が手動で行う手動走行を有し、
前記制御装置は、作業を行う圃場内を前記手動走行で前記走行車体を走行させることで圃場情報を取得するティーチング機能をさらに有し、
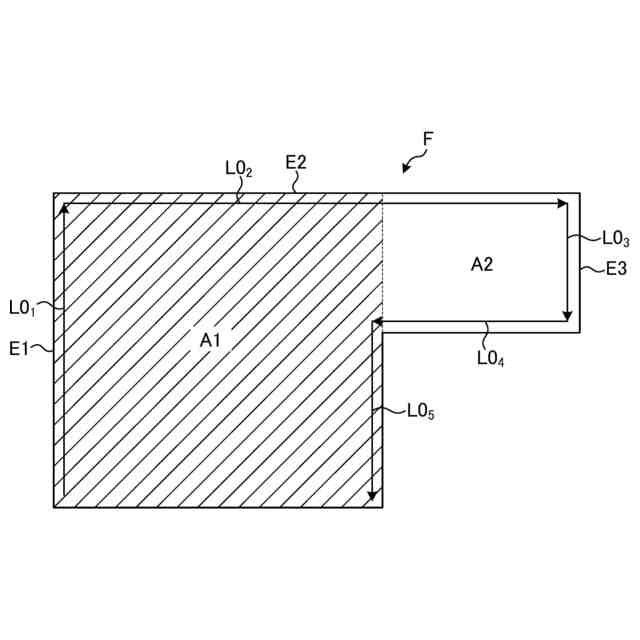
前記ティーチング機能において、作業を行う圃場の一部が自律走行できないと判断した場合、前記自律走行において、前記走行車体による自律走行が可能な領域を走行させた後、前記手動走行へと移行することを特徴とする請求項1または2に記載の圃場作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、圃場作業機に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、圃場内で走行車体が自律走行しながら作業を行う自動モードを有する作業車両が知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-141615号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、自動モードを有する作業車両は、たとえば、自動モードの場合でも、農用資材を補給するために畦際に機体を移動させる操作は作業者が手動で(機体を操縦して)走行車体を移動させる煩わしさがあるなど、作業性を向上させる点について改善の余地があった。
【0005】
本発明は、上記に鑑みてなされたものであって、作業性を向上させることができる圃場作業機を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明に係る圃場作業機は、操舵輪を含む走行輪を有し、圃場内を走行可能な走行車体(2)と、前記操舵輪を操舵駆動するステアリング装置(95)と、前記ステアリング装置(95)を制御するとともに、前記走行車体(2)を自律走行させる制御装置(100)とを備え、目標走行経路を走行する自動往復走行を繰り返すことにより対地作業として圃場に農用資材を供給する圃場作業機であって、前記圃場の外周辺のうちの少なくともいずれかの外周辺である辺で前記農用資材の補給が行われ、前記走行車体(2)と離間した位置から前記走行車体(2)の遠隔操作を行うことができる遠隔装置を備え、前記農用資材を補給するために前記走行車体(2)を畦際で自動停止させ、さらに畦に寄せる畦寄せ操作が前記遠隔装置により行えることを特徴とする。
【発明の効果】
【0007】
本発明に係る圃場作業機によれば、作業性を向上させることができる。
【図面の簡単な説明】
【0008】
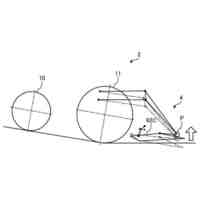
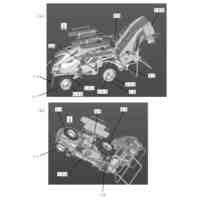
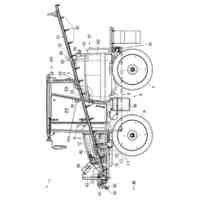
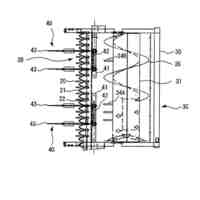
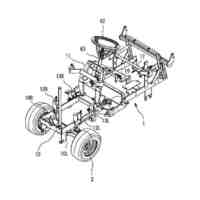
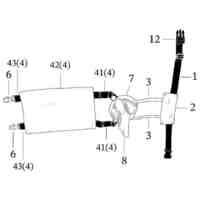
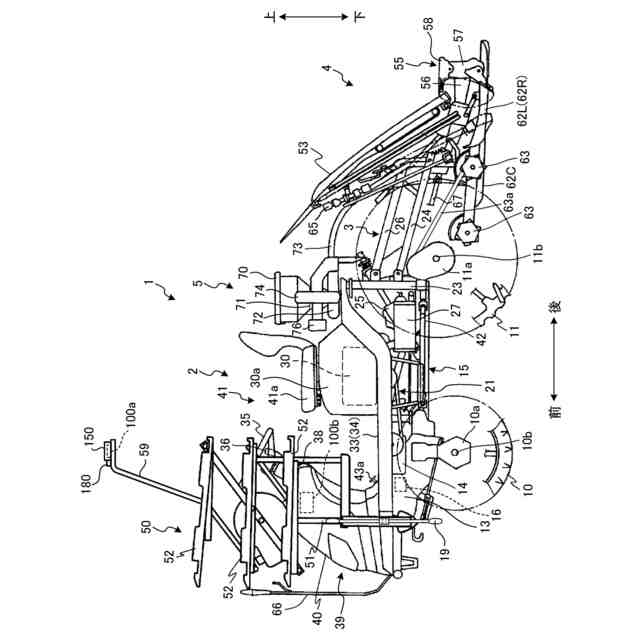
図1は、実施形態に係る作業車両を示す概略左側面図である。
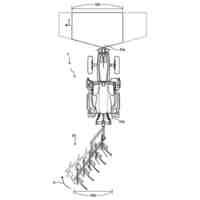
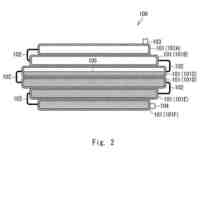
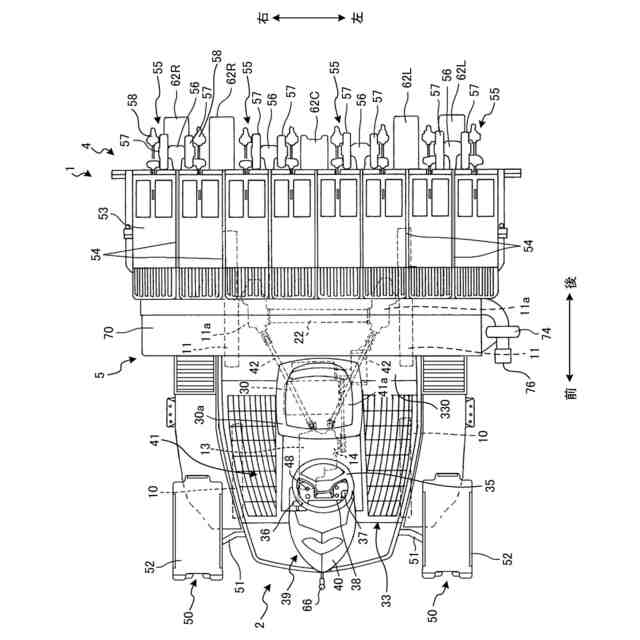
図2は、実施形態に係る作業車両を示す概略平面図である。
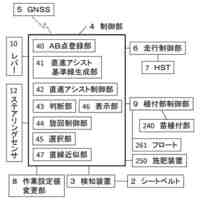
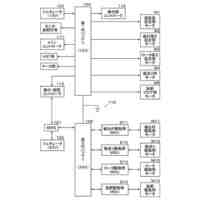
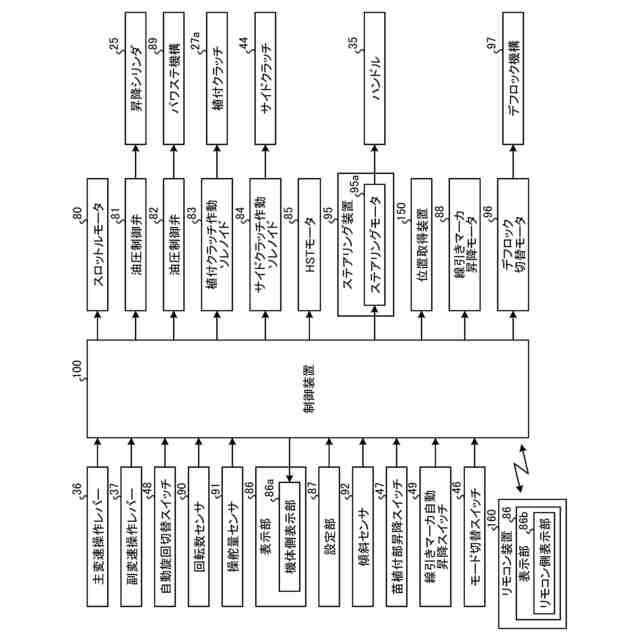
図3は、制御装置を中心とする制御系の一例を示すブロック図である。
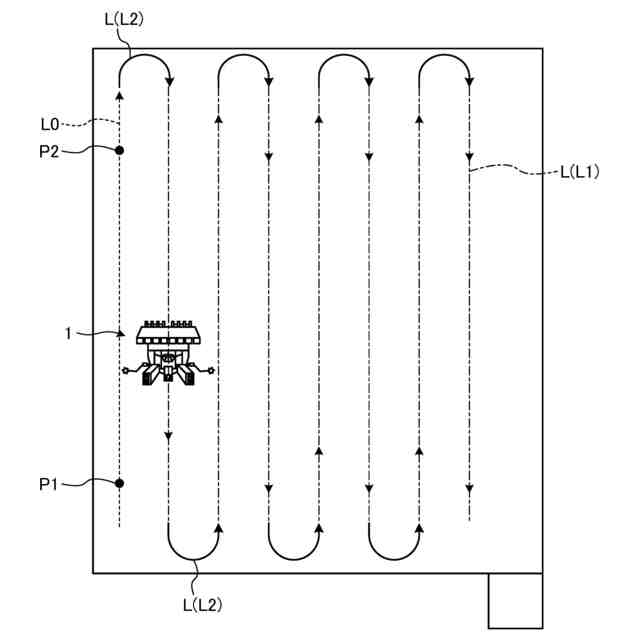
図4は、圃場内における自律走行の説明図である。
図5は、制御装置によって実行されるモード構成を示す図である。
図6は、ティーチングモードにおける作業エリア情報取得の一例を示す図である。
図7は、リモコン装置を示す正面図である。
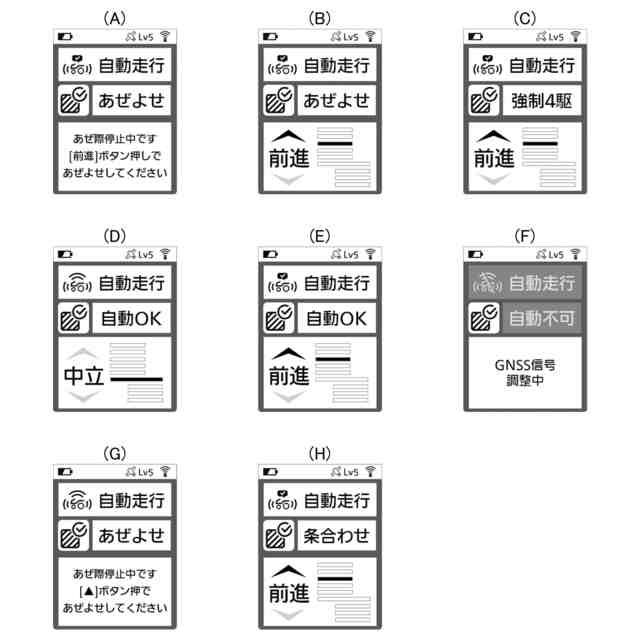
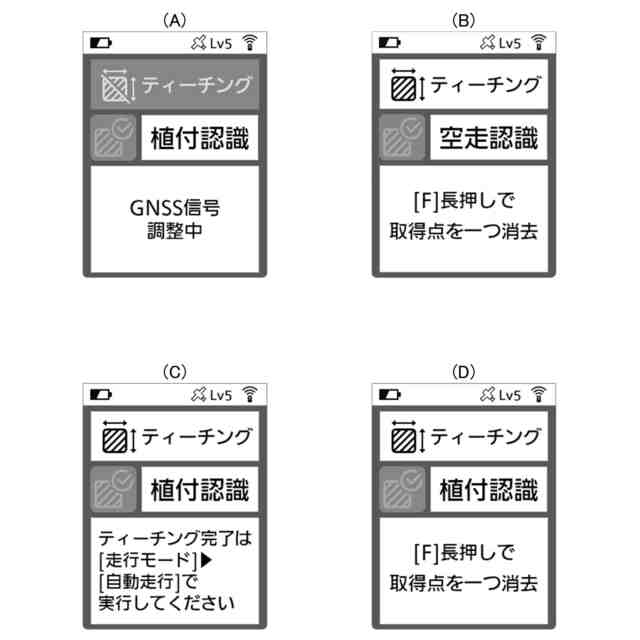
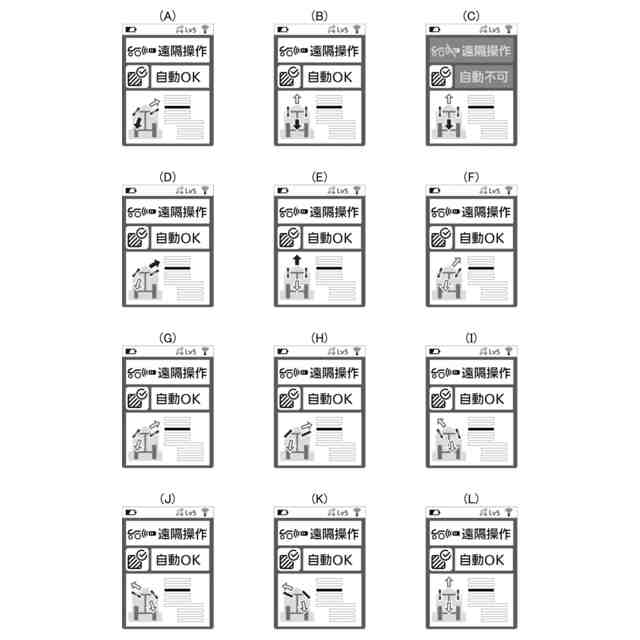
図8は、リモコン側表示部におけるトップ画面(その1)の表示例を示す図である。
図9は、リモコン側表示部におけるトップ画面(その2)の表示例を示す図である。
図10は、リモコン側表示部におけるトップ画面(その3)の表示例を示す図である。
図11は、リモコン側表示部におけるトップ画面(その4)の表示例を示す図である。
図12は、リモコン側表示部におけるモード画面の表示例を示す図である。
図13は、リモコン側表示部におけるメニュー画面(その1)の表示例を示す図である。
図14は、リモコン側表示部におけるメニュー画面(その2)の表示例を示す図である。
図15は、リモコン側表示部におけるメニュー画面(その3)の表示例を示す図である。
図16は、リモコン側表示部におけるティーチング時の画面の表示例を示す図である。
図17は、機体側表示部における画面の表示例(その1)を示す図である。
図18は、機体側表示部における画面の表示例(その2)を示す図である。
図19は、機体側表示部における画面の表示例(その3)を示す図である。
図20は、機体側表示部における画面の表示例(その4)を示す図である。
図21は、機体側表示部における画面の表示例(その5)を示す図である。
図22は、機体側表示部における画面の表示例(その6)を示す図である。
図23は、機体側表示部における画面の表示例(その7)を示す図である。
図24は、機体側表示部における画面の表示例(その8)を示す図である。
図25は、機体側表示部における画面の表示例(その9)を示す図である。
図26は、機体側表示部における画面の表示例(その10)を示す図である。
図27は、機体側表示部における画面の表示例(その11)を示す図である。
図28は、機体側表示部における画面の表示例(その12)を示す図である。
図29は、ティーチングモードにおける作業エリア情報取得の他の例を示す図である。
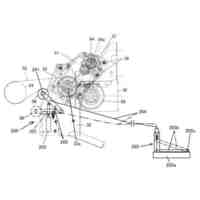
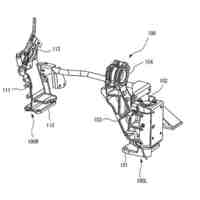
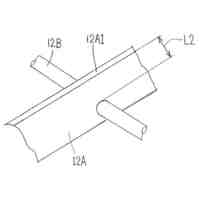
図30は、立ち操舵補助機構(その1)を示す図である。
図31は、立ち操舵補助機構(その2)を示す図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して本願の開示する作業車両の実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0010】
<作業車両(苗移植機)の概要>
まず、図1および図2を参照して実施形態に係る作業車両(苗移植機)1の概要について説明する。図1は、実施形態に係る作業車両(苗移植機)1を示す概略左側面図である。図2は、実施形態に係る作業車両(苗移植機)1を示す概略平面図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
11日前
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
薬剤散布機
11日前
井関農機株式会社
収穫作業機
17日前
井関農機株式会社
収穫作業機
17日前
井関農機株式会社
コンバイン
5日前
井関農機株式会社
農業支援システム
20日前
井関農機株式会社
汎用コンバインの脱穀装置
10日前
井関農機株式会社
汎用コンバインの脱穀装置
10日前
井関農機株式会社
汎用コンバインの脱穀装置
17日前
井関農機株式会社
田んぼアート作成システム
18日前
井関農機株式会社
作業車両の作業量調整システム
17日前
井関農機株式会社
移植機
10日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
3日前
個人
昆虫捕獲器
12日前
個人
トラップタワー
11日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
収穫作業機
17日前
株式会社猫壱
首輪
3日前
個人
ペット用デンタルおもちゃ
11日前
有限会社小林工業
エビ養殖設備
4日前
個人
ペット用排泄物収納袋取付具
18日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
3日前
トヨタ自動車株式会社
飛行体
18日前
平岡織染株式会社
防虫間仕切りシート
2日前
平岡織染株式会社
防虫間仕切りシート
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ