TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025044559
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023152197
出願日
2023-09-20
発明の名称
雑草発生抑制機
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
39/18 20060101AFI20250326BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】 従来の雑草発生抑制機については、便利な機能を利用するときの使い勝手が必ずしもよくないことに本発明者は気付いた。より具体的には、従来の雑草発生抑制ロボットのような雑草発生抑制機については、座礁にともなうレスキュー作業などが頻繁に要求されることがあり、ロボット作業運航の完全な自動化が必ずしも実現されていないことに本発明者は気付いた。
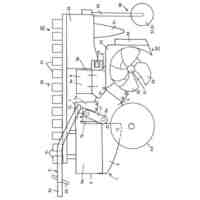
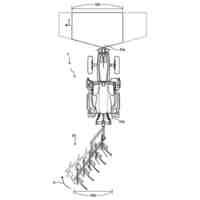
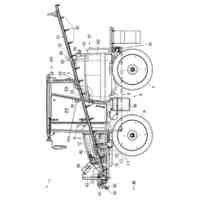
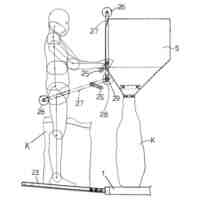
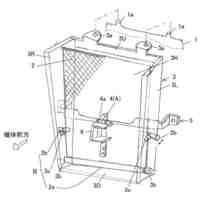
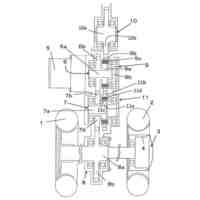
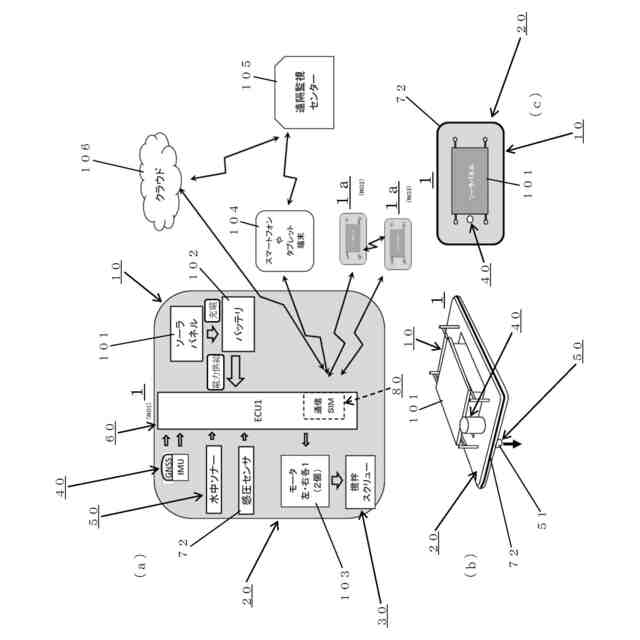
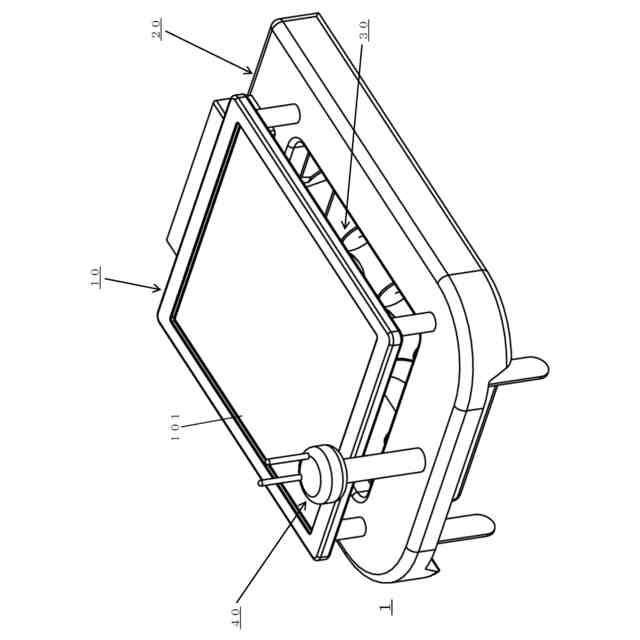
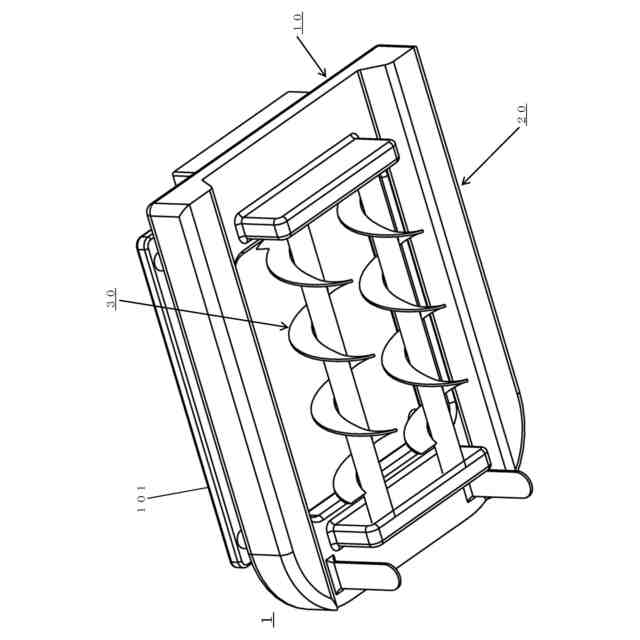
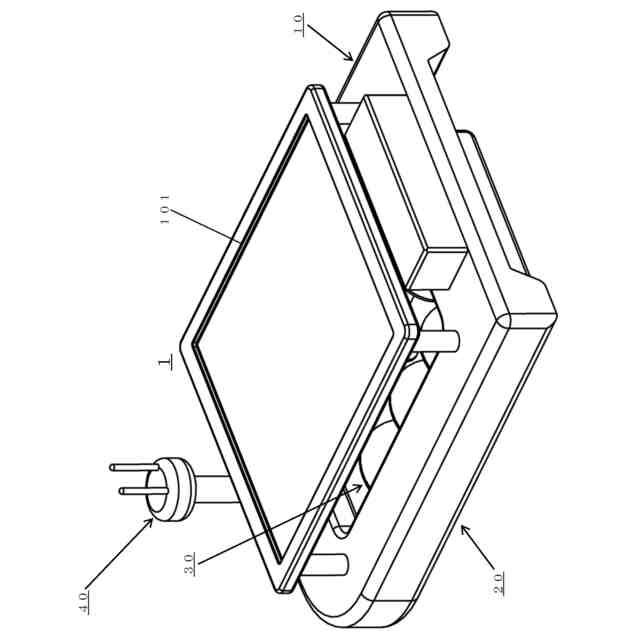
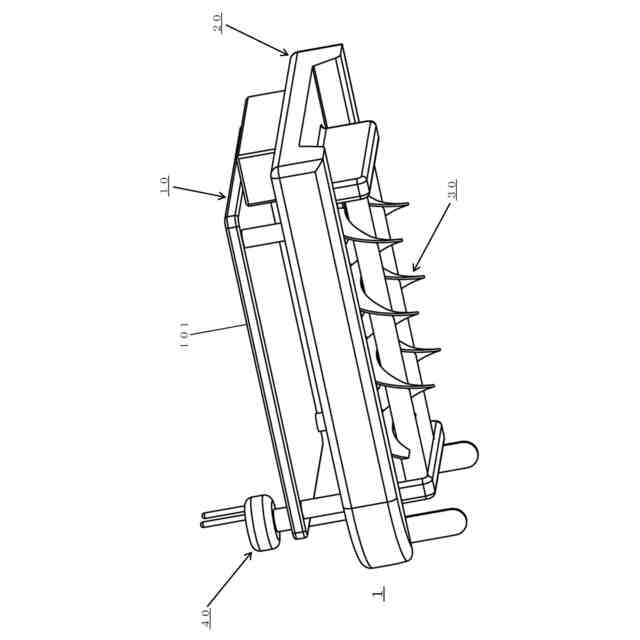
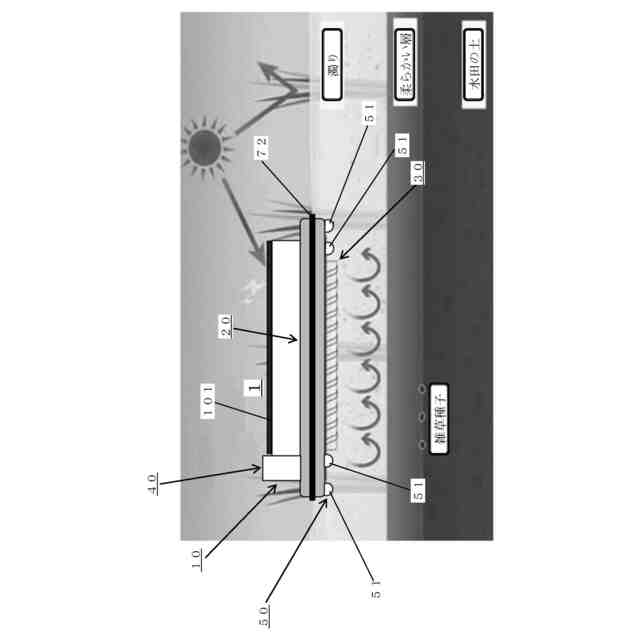
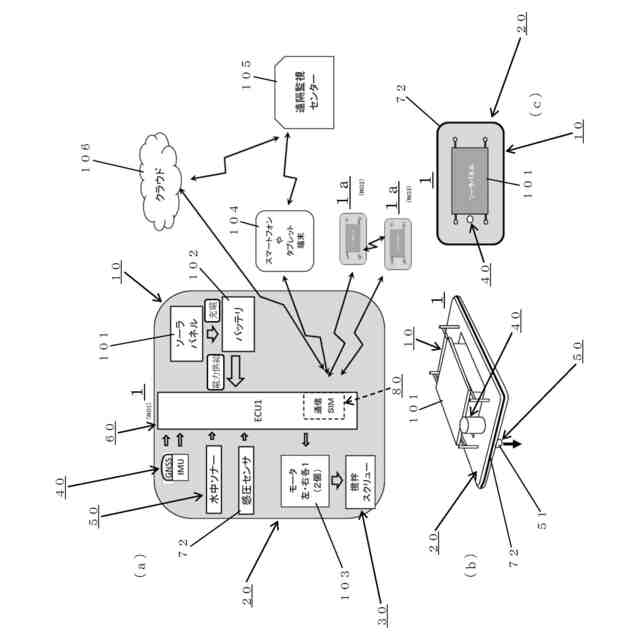
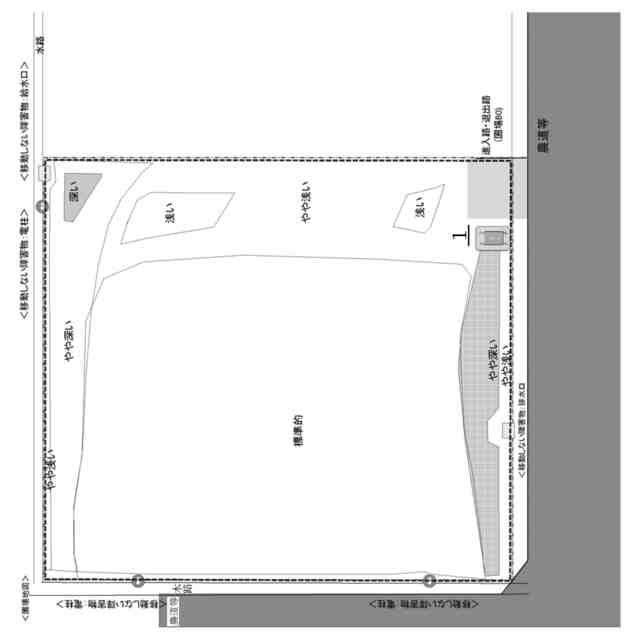
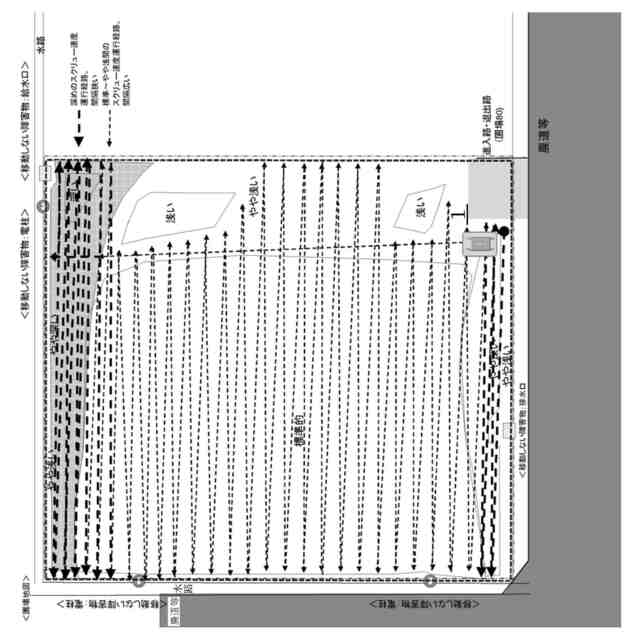
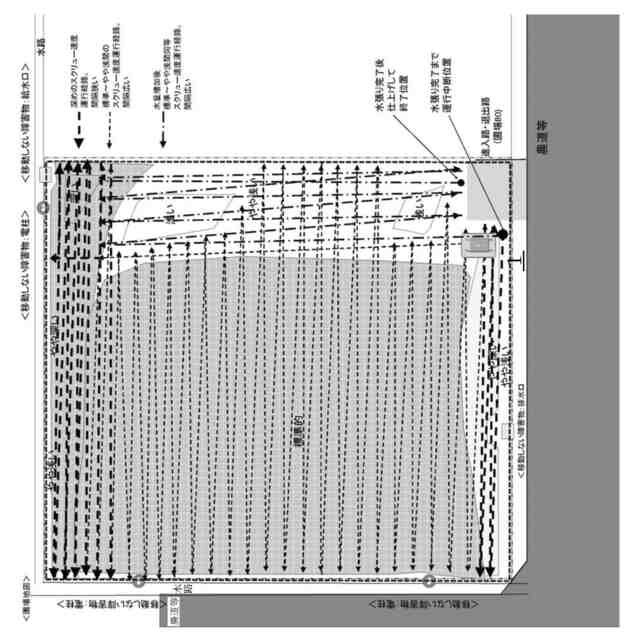
【解決手段】 機体10を水田の水面に浮かべるフロート装置20と、水田の水を撹拌しながら機体10を運航させるスクリュー装置30と、機体10の位置測定を行う測位装置40と、を備えており、機体10を運航させるための運航ルートは、水田の水深に関するマップから得られた水深に基づいて生成される雑草発生抑制ロボット1である。
【選択図】 図6
特許請求の範囲
【請求項1】
機体を水田の水面に浮かべるフロート装置と、
前記水田の水を撹拌しながら前記機体を運航させるスクリュー装置と、
前記機体の位置測定を行う測位装置と、
を備えており、
前記機体を運航させるための運航ルートは、前記水田の水深に関するマップから得られた前記水深に基づいて生成されることを特徴とする雑草発生抑制機。
続きを表示(約 1,500 文字)
【請求項2】
前記水深がより大きいエリアほど、前記エリアにおいて前記生成される運航ルートの密度はより大きいことを特徴とする請求項1に記載の雑草発生抑制機。
【請求項3】
前記運航ルートにおける前記水深があらかじめ定められた第一の水深閾値を下回らないように、前記運航ルートは生成されることを特徴とする請求項2に記載の雑草発生抑制機。
【請求項4】
前記水田の水深測定を行うソナー装置をさらに備えており、
前記運航ルートの補正が、前記水深測定の結果に基づいて行われることを特徴とする請求項3に記載の雑草発生抑制機。
【請求項5】
前記ソナー装置は、互いに近接するように配置された複数のソナー検出器を有し、
前記複数のソナー検出器の検出値の内、最大の前記検出値が前記運航ルートの前記補正において採用されることを特徴とする請求項4に記載の雑草発生抑制機。
【請求項6】
前記運航ルートにおける前記水深があらかじめ定められた第二の水深閾値を下回る場合においては、前記機体の運航速度はあらかじめ定められた運航速度閾値を下回るように制御されることを特徴とする請求項5に記載の雑草発生抑制機。
【請求項7】
水平方向の走査波を照射することにより障害物を検出する、前記機体へ昇降可能に取付けられた非接触センサーと、
前記照射された走査波の反射が検出されなくなる高さまで前記非接触センサーをあらかじめ上昇させる制御装置と、
をさらに備えており、
前記機体が運航させられるとき、前記あらかじめ上昇させられた非接触センサーは障害物を検出し、障害物が検出された場合においては、障害物回避動作が行われることを特徴とする請求項6に記載の雑草発生抑制機。
【請求項8】
障害物を検出する、前記機体へ取付けられた感圧センサーをさらに備えており、
前記機体が運航させられるとき、前記感圧センサーは障害物を検出し、前記感圧センサーの検出値があらかじめ定められた感圧閾値を上回る場合においては、障害物回避動作が行われることを特徴とする請求項7に記載の雑草発生抑制機。
【請求項9】
他の雑草発生抑制機と通信を行う通信装置をさらに備えており、
前記障害物回避動作が行われるに先立って、前記他の雑草発生抑制機が前記機体から所定の範囲に存在するか否かが判断され、
前記他の雑草発生抑制機が前記所定の範囲に存在しないと判断された場合においては、前記障害物回避動作がすぐに行われ、
前記他の雑草発生抑制機が前記所定の範囲に存在すると判断された場合においては、前記通信装置は前記他の雑草発生抑制機と通信を行って退避を促し、所定の時間が経過した後、障害物の検出がさらに行われ、障害物がもはや検出されない場合においては、前記障害物回避動作は行われず、障害物がまだ検出される場合においては、前記障害物回避動作が行われることを特徴とする請求項8に記載の雑草発生抑制機。
【請求項10】
前記スクリュー装置により前記撹拌された水へ光を発光する発光ユニットと、
前記撹拌された水を透過した後の前記発光された光を受光する受光ユニットと、
をさらに備えており、
前記受光された光の光量があらかじめ定められた光量閾値を上回る前記水田の領域においては、前記機体は往復するように運航させられる、または前記運航速度は減少するように制御されることを特徴とする請求項9に記載の雑草発生抑制機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、雑草発生抑制ロボットのような雑草発生抑制機に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
水に浮くフロートボディと、フロートボディの下面から水中に張り出すスクリューと、を備え、フロートボディによって水に浮いてスクリューの下端による喫水が水底に至らない状態で、スクリューにより推進しつつ水田の水を攪拌して泥を巻き上げ泥幕を生じさせ、その泥幕により雑草の生育を防止または抑制する水田用除草装置であって、水田用除草装置の喫水位置を上下させる喫水調整機構を備える水田用除草装置が、知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第7193817号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、本発明者は、雑草発生抑制機ユーザーのさまざまなニーズを考慮し、便利な機能が雑草発生抑制ロボットのような雑草発生抑制機へつぎつぎと実装される趨勢はますます加速すると考えている。
【0005】
しかしながら、従来の雑草発生抑制機については、便利な機能を利用するときの使い勝手が必ずしもよくないことに本発明者は気付いた。
【0006】
より具体的には、従来の雑草発生抑制ロボットのような雑草発生抑制機については、座礁にともなうレスキュー作業などが頻繁に要求されることがあり、ロボット作業運航の完全な自動化が必ずしも実現されていないことに本発明者は気付いた。
【0007】
本発明は、上述された従来の課題を考慮し、使い勝手を向上することができる雑草発生抑制機を提供することを目的とする。
【課題を解決するための手段】
【0008】
第1の本発明は、機体を水田の水面に浮かべるフロート装置と、
前記水田の水を撹拌しながら前記機体を運航させるスクリュー装置と、
前記機体の位置測定を行う測位装置と、
を備えており、
前記機体を運航させるための運航ルートは、前記水田の水深に関するマップから得られた前記水深に基づいて生成されることを特徴とする雑草発生抑制機である。
【0009】
第2の本発明は、前記水深がより大きいエリアほど、前記エリアにおいて前記生成される運航ルートの密度はより大きいことを特徴とする第1の本発明の雑草発生抑制機である。
【0010】
第3の本発明は、前記運航ルートにおける前記水深があらかじめ定められた第一の水深閾値を下回らないように、前記運航ルートは生成されることを特徴とする第2の本発明の雑草発生抑制機である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
収穫機
23日前
井関農機株式会社
移植機
23日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
育苗培地
17日前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
17日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
苗移植機
11日前
井関農機株式会社
コンバイン
23日前
井関農機株式会社
薬剤散布機
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
耕耘作業機
1か月前
井関農機株式会社
コンバイン
6日前
井関農機株式会社
コンバイン
20日前
井関農機株式会社
ラジエータ
10日前
井関農機株式会社
コンバイン
11日前
井関農機株式会社
収穫作業車両
18日前
井関農機株式会社
電動作業車両
4日前
井関農機株式会社
乗用型苗植機
24日前
井関農機株式会社
収穫作業車両
16日前
井関農機株式会社
資材散布装置
1か月前
井関農機株式会社
施肥システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ