TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025037264
公報種別
公開特許公報(A)
公開日
2025-03-18
出願番号
2023144052
出願日
2023-09-06
発明の名称
打撃ロボットアーム及び卓球ロボット
出願人
クワンタービュー株式会社
代理人
個人
,
個人
主分類
B25J
5/02 20060101AFI20250311BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】本発明は、打撃ロボットアームのベースに与える負担を軽減することを目的とする。
【解決手段】打撃ロボットアーム(30)は、ベース(23)に回転可能に組み付けられる旋回部(31)と、前記旋回部(31)を回転駆動する第1モーター(33)と、前記旋回部(31)に回転可能に連結される第1リンク(35)と、前記旋回部(31)に回転可能に連結されるロアリンク(39)と、前記ロアリンク(39)に回転可能に連結される第2リンク(41)と、前記第2リンク(41)に回転可能に連結されるとともに前記第1リンク(35)に回転可能に連結されるアッパーリンク(43)と、前記アッパーリンク(43)に取り付けられるラケット(60)と、前記旋回部(31)に取り付けられ、前記第1リンク(35)及び前記ロアリンク(39)をそれぞれ駆動する第2モーター(51)及び第3モーター(53)と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
ベースと、
鉛直な軸の回りに回転可能に前記ベースに組み付けられる旋回部と、
前記旋回部を回転駆動する第1モーターと、
前記旋回部に回転可能に連結される近位端と、遠位端とを有し、その近位端からその遠位端に向かって上方に延びる第1リンクと、
前記旋回部に回転可能に連結される近位端と、遠位端とを有するロアリンクと、
前記ロアリンクの遠位端に回転可能に連結される近位端と、遠位端とを有し、その近位端からその遠位端に向かって上方に延びる第2リンクと、
前記第2リンクの遠位端に回転可能に連結される近位端と、前記第1リンクの遠位端に回転可能に連結される遠位端とを有するアッパーリンクと、
前記アッパーリンクの遠位端に取り付けられるラケットと、
前記旋回部に取り付けられ、前記第1リンクの近位端に連結され、前記第1リンクを駆動する第2モーターと、
前記旋回部に取り付けられ、前記ロアリンクの近位端に連結され、前記ロアリンクを駆動する第3モーターと、
を備える打撃ロボットアーム。
続きを表示(約 320 文字)
【請求項2】
前記ラケットと前記アッパーリンクとの間に取り付けられ、前記ラケットの柄部の中心軸の回りに前記ラケットを回転する第4モーター
を更に備える請求項1に記載の打撃ロボットアーム。
【請求項3】
前記第2リンクが、前記ラケットと釣り合うカウンターウエイトである
請求項1又は2に記載の打撃ロボットアーム。
【請求項4】
請求項1又は2に記載の打撃ロボットアームと、
卓球台と、
前記卓球台のエンドラインに沿って前記ベースを案内するリニアガイドと、
前記ベースを前記卓球台のエンドラインに沿って移動させる駆動機構と、
を備える卓球ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、打撃ロボットアーム及び卓球ロボットに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
卓球は人気スポーツの一つである。2人のプレイヤーが卓球台をはさんで向かい合い、両プレイヤーがボールをラケットで打ち返し合う。しかしながら、プレイヤーは1人で対戦相手無しに卓球をプレイしたいと思うことがある。そのために、様々な卓球ロボットが開発されている(例えば、特許文献1-10参照)。
【0003】
特に、特許文献10は、ラケットを振るスカラー型ロボットを用いた卓球ロボットを開示する。具体的には、ガイドレールが卓球台のエンドラインに沿って設けられ、スカラー型ロボットがガイドレールに沿ってサーボモータの動力によって移動され、スカラー型ロボットがラケットでボールを打ち返す。このスカラー型ロボットは5つの関節を有する多関節ロボットであり、これら関節がサーボモータによって駆動されることによってスカラー型ロボットの動作が実現される。特許文献10は、スカラー型ロボットをガイドレールに沿って移動する1台のサーボモーターの設置箇所を開示する。しかし、特許文献10は、スカラー型ロボットの関節を駆動するサーボモーターの設置箇所を開示しない。
【先行技術文献】
【特許文献】
【0004】
特開2008-36383号公報
中国特許第108939490号明細書
中国特許第108858247号明細書
中国実用新案第206214699号明細書
中国特許第109847301号明細書
中国特許出願公開第111251312号明細書
中国特許出願公開第109015682号明細書
中国特許出願公開第107283441号明細書
中国特許出願公開第103272376号明細書
中国特許出願公開106426200号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
スカラー型ロボットの関節を駆動するサーボモーターがその関節に設けられていれば、関節がラケットに近くなるにつれて、スカラー型ロボットの姿勢の安定性はサーボモーターの重量により悪くなる。関節がラケットに近くなるにつれて、サーボモーターの基部及びスライドレールに与える負担が大きくなる。
そこで、本発明は上記事情に鑑みてなされたものであり、本発明の目的は、打撃ロボットアームのベースに与える負担を軽減することである。
【課題を解決するための手段】
【0006】
以下の括弧書きで示された参照符号は図1~図6において参照される。
【0007】
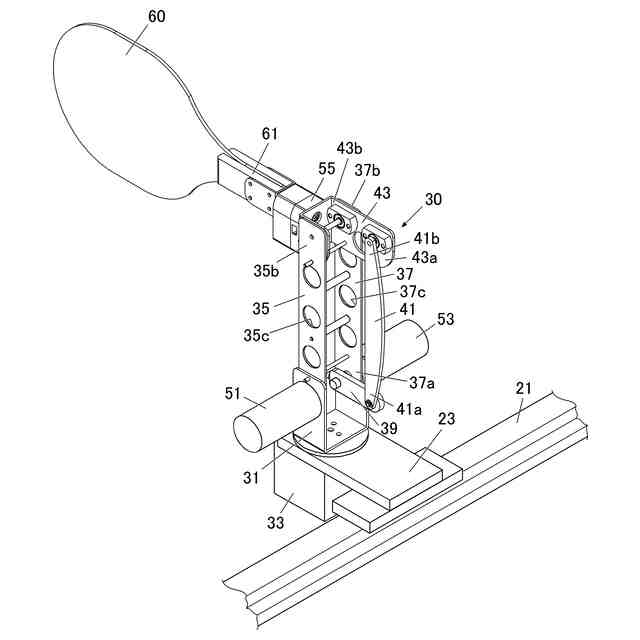
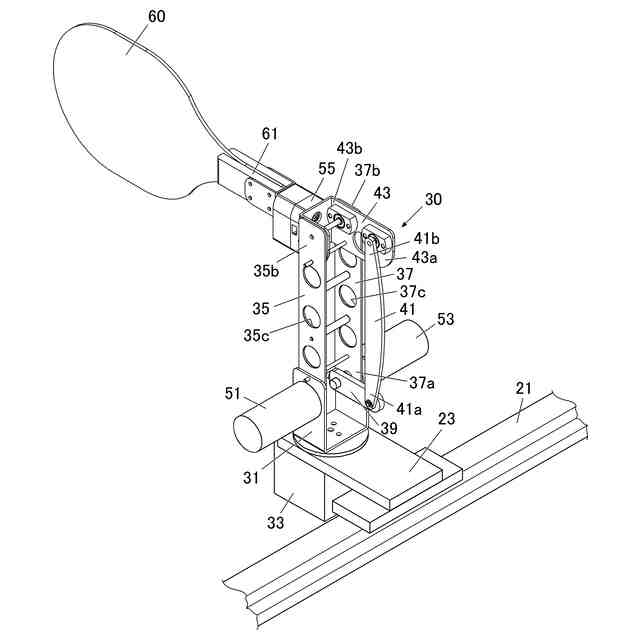
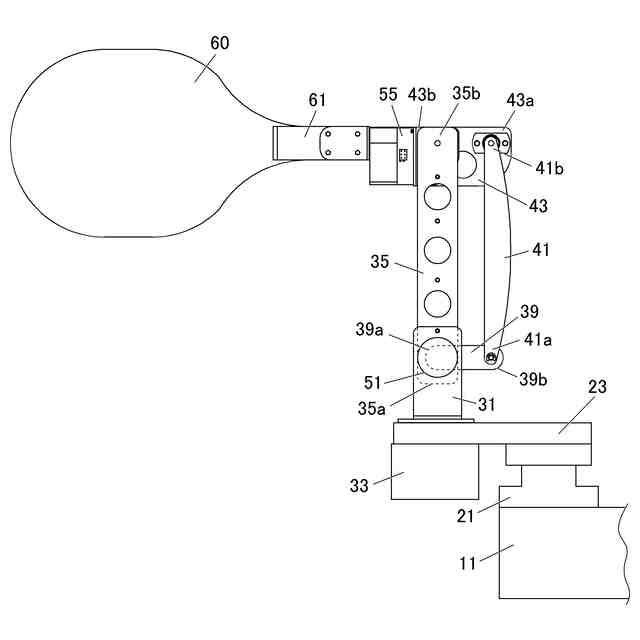
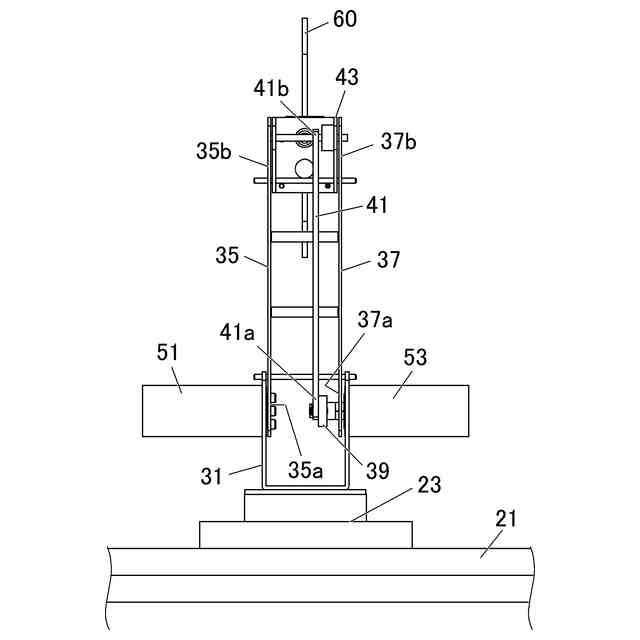
以上の課題を解決するための打撃ロボットアーム(30)は、ベース(23)と、鉛直な軸の回りに回転可能に前記ベース(23)に組み付けられる旋回部(31)と、前記旋回部(31)を回転駆動する第1モーター(33)と、前記旋回部(31)に回転可能に連結される近位端(35a)と、遠位端(35b))とを有し、その近位端(35a)からその遠位端(35b)に向かって上方に延びる第1リンク(35)と、前記旋回部(31)に回転可能に連結される近位端(39a)と、遠位端(39b)とを有するロアリンク(39)と、前記ロアリンク(39)の遠位端(39b)に回転可能に連結される近位端(41a)と、遠位端(41b)とを有し、その近位端(41a)からその遠位端(41b)に向かって上方に延びる第2リンク(41)と、前記第2リンク(41)の遠位端(41b)に回転可能に連結される近位端(43a)と、前記第1リンク(35)の遠位端(35b)に回転可能に連結される遠位端(43b)とを有するアッパーリンク(43)と、前記アッパーリンク(43)の遠位端(43b)に取り付けられるラケット(60)と、前記旋回部(31)に取り付けられ、前記第1リンク(35)の近位端(35a)に連結され、前記第1リンク(35)を駆動する第2モーター(51)と、前記旋回部(31)に取り付けられ、前記ロアリンク(39)の近位端(39a)に連結され、前記ロアリンク(39)を駆動する第3モーター(53)と、を備える。
【0008】
打撃ロボットアーム(30)は、前記ラケット(60)と前記アッパーリンク(43)との間に取り付けられ、前記ラケット(60)の柄部(61)の中心軸の回りに前記ラケット(60)を回転する第4モーター(55)を更に備えてもよい。
【0009】
前記第2リンク(41)が、前記ラケット(60)と釣り合うカウンターウエイトであってもよい。
【0010】
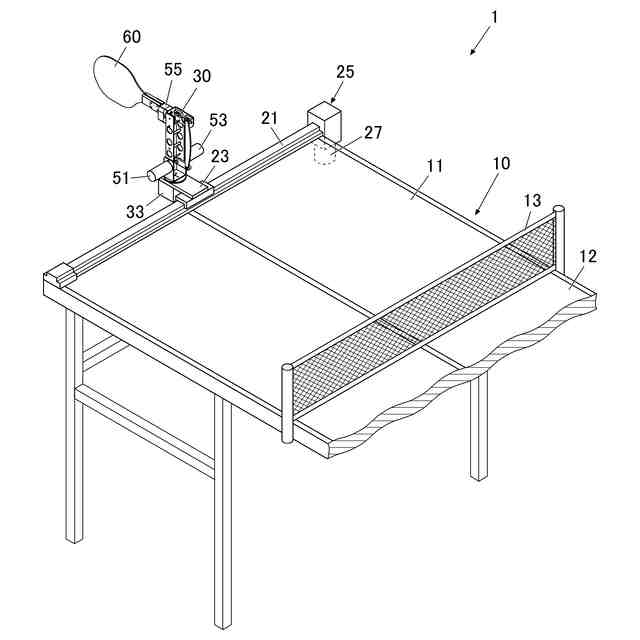
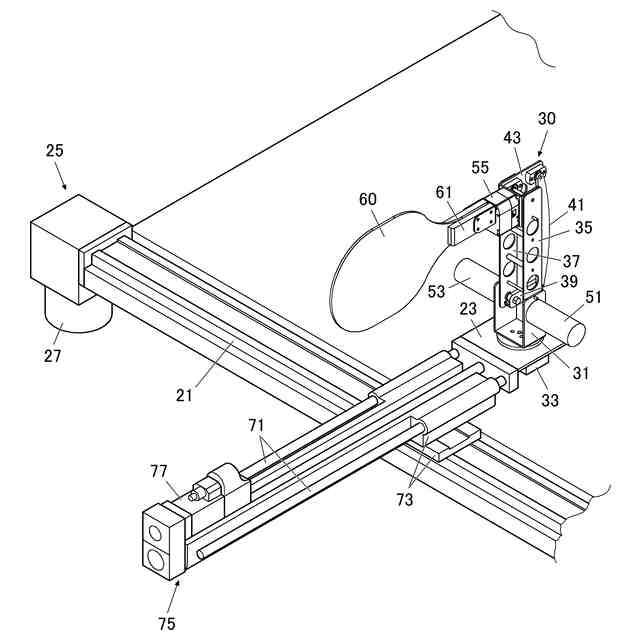
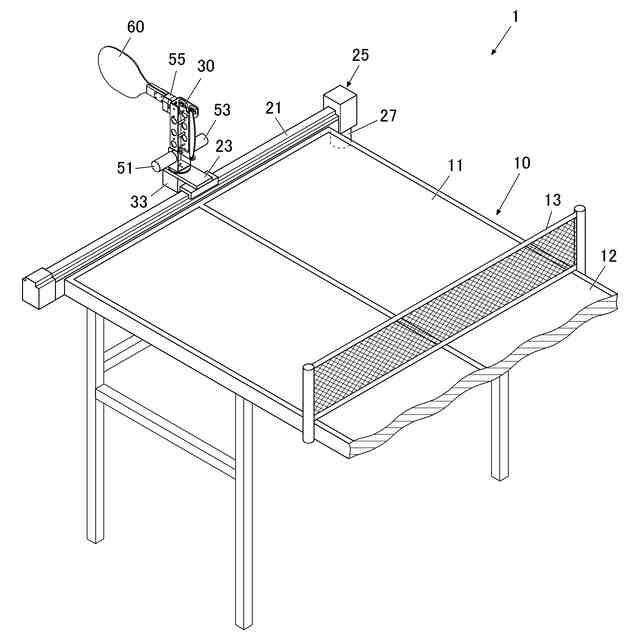
卓球ロボット(1)が、前記打撃ロボットアーム(30)と、卓球台(10)と、前記卓球台(10)のエンドラインに沿って前記ベース(23)を案内するリニアガイド(21)と、前記ベース(23)を前記卓球台(10)のエンドラインに沿って移動させる駆動機構(25)と、を備えてもよい。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
1か月前
川崎重工業株式会社
ハンド
18日前
株式会社アイセイ
搬送装置
24日前
株式会社マキタ
電動工具
1か月前
個人
けがき用治具
12日前
株式会社不二越
ロボット
10日前
国立大学法人金沢大学
ロボット
1か月前
株式会社不二越
ロボット操作装置
9日前
個人
深孔スリーブ駆動ロッド構造
2日前
川崎重工業株式会社
ロボット
10日前
株式会社ケー・エフ・シー
締結構造
1か月前
川崎重工業株式会社
ロボットシステム
18日前
個人
バール
2日前
株式会社デンソー
操縦桿
10日前
日本信号株式会社
作業機制御システム
1か月前
株式会社黒澤鉄工製作所
けがき用治具
12日前
株式会社京阪エンジニアリング
脱着装置
1か月前
梅馨堂合同会社
人協働ロボットシステム
4日前
株式会社スター精機
ワーク搬送装置
1か月前
株式会社不二越
基板搬送用ロボット
19日前
アピュアン株式会社
衝撃工具
25日前
株式会社マキタ
集塵アタッチメント
1か月前
トヨタ自動車株式会社
把持装置、把持方法
1か月前
ARMA株式会社
UI付エンドエフェクタ
5日前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社コスメック
把持装置
1か月前
国立大学法人 東京大学
ロボットアーム
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
株式会社不二越
ロボットビジョンシステム
1か月前
原利興工業有限公司
工具用スリーブ
1か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
24日前
株式会社マキタ
作業機
9日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
24日前
株式会社マキタ
電動工具
24日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ