TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025036890
公報種別
公開特許公報(A)
公開日
2025-03-17
出願番号
2023143516
出願日
2023-09-05
発明の名称
表示装置
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250310BHJP(信号)
要約
【課題】例えばナビゲーション装置の地図情報を主に用いる場合と比べて、より適切な状況で周辺状況画像を表示部に自動表示することができる表示装置を提供する。
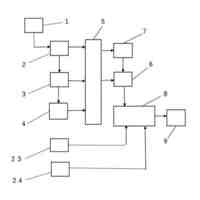
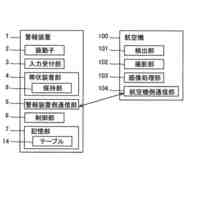
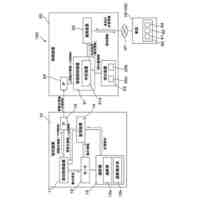
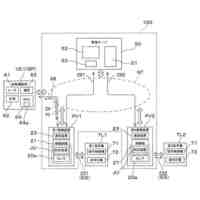
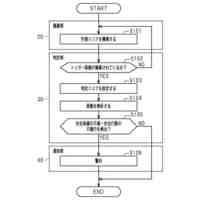
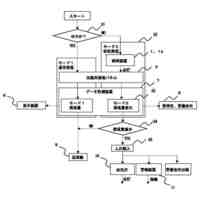
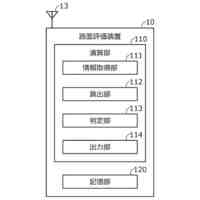
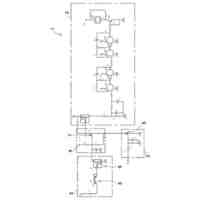
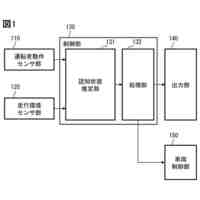
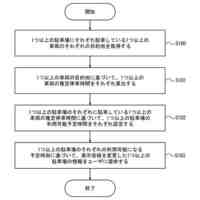
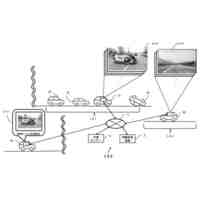
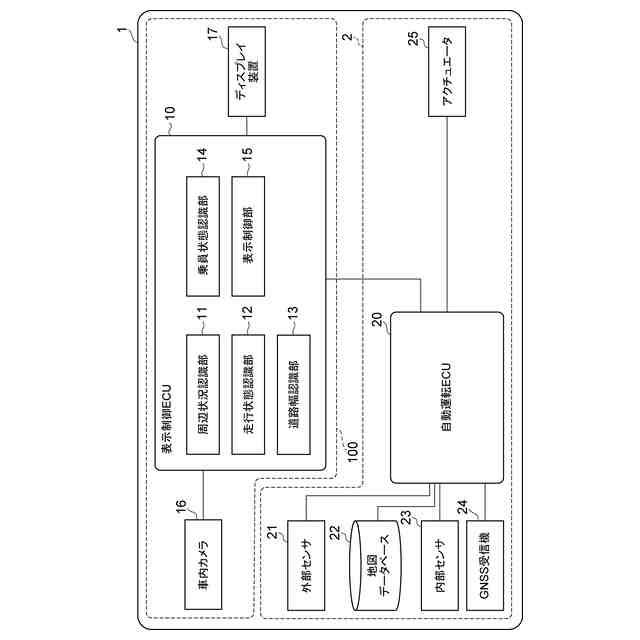
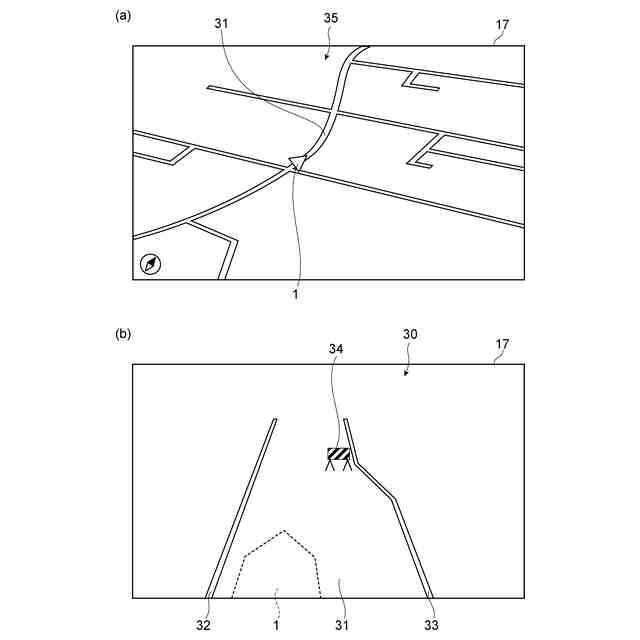
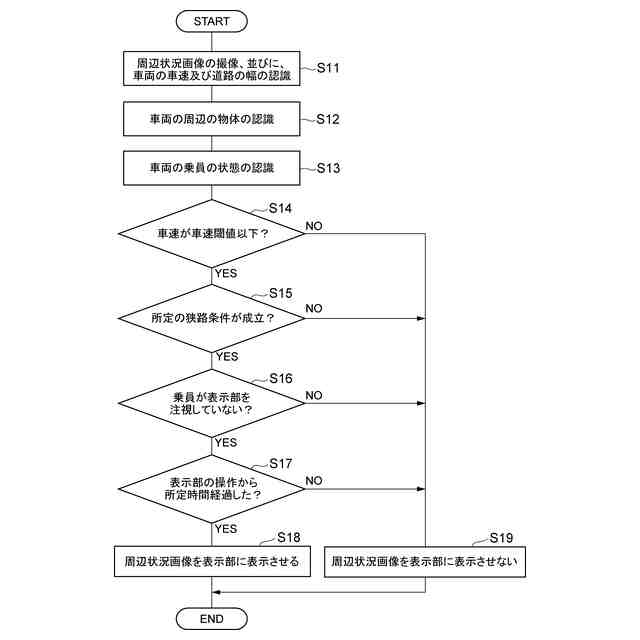
【解決手段】表示装置100は、車両1の周辺の状況を表す周辺状況画像を撮像するカメラを含み、車両1の自動運転制御又は運転支援制御に用いられる車載の外部センサ21の検出結果に基づいて、車両1が走行中の道路の幅を認識する道路幅認識部13と、周辺状況画像を車載のディスプレイ装置17に表示させる表示制御部15と、を備える。表示制御部15は、少なくとも道路の幅及び車両1の車速に基づいて、車速が所定の車速閾値以下であって且つ所定の狭路条件が成立している場合、ディスプレイ装置17に周辺状況画像を表示させる。
【選択図】図1
特許請求の範囲
【請求項1】
車両の周辺の状況を表す周辺状況画像を撮像するカメラを含み、前記車両の自動運転制御又は運転支援制御に用いられる車載の外部センサの検出結果に基づいて、前記車両が走行中の道路の幅を認識する道路幅認識部と、
前記周辺状況画像を車載の表示部に表示させる表示制御部と、を備え、
前記表示制御部は、少なくとも前記道路の幅及び前記車両の車速に基づいて、前記車速が所定の車速閾値以下であって且つ所定の狭路条件が成立している場合、前記表示部に前記周辺状況画像を表示させる、表示装置。
続きを表示(約 550 文字)
【請求項2】
前記外部センサの検出結果に基づいて、前記車両の周辺の物体を認識する周辺物体認識部を備え、
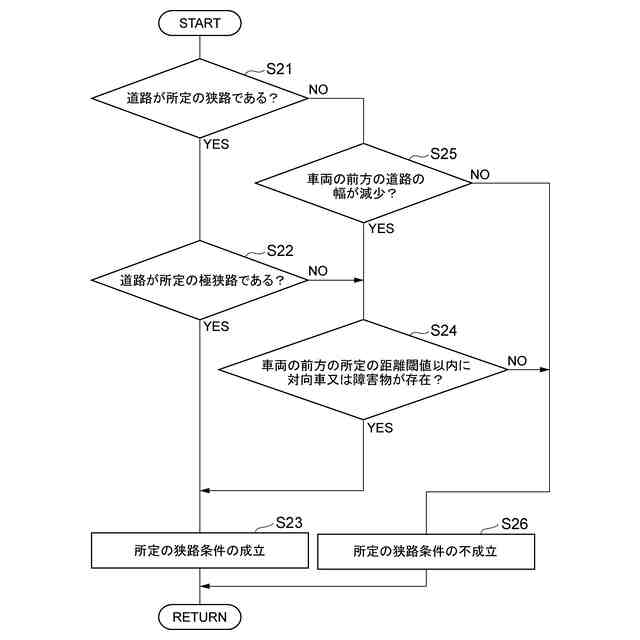
前記狭路条件は、
前記道路が所定の極狭路である場合、或いは、
前記道路が前記所定の極狭路よりも広い所定の狭路であり、且つ前記車両の前方の所定の距離閾値以内に対向車又は障害物が存在する場合、
に成立する、請求項1に記載の表示装置。
【請求項3】
前記外部センサの検出結果に基づいて、前記車両の周辺の物体を認識する周辺物体認識部を備え、
前記狭路条件は、
前記道路が所定の狭路よりも広く、前記車両の前方の前記道路の幅が減少し、且つ前記車両の前方の所定の距離閾値以内に対向車又は障害物が存在する場合、
に成立する、請求項1又は2に記載の表示装置。
【請求項4】
前記車両の乗員を撮像する車内カメラの撮像画像に基づいて、前記車両の乗員の状態を認識する乗員状態認識部を備え、
前記表示制御部は、前記車速が所定の車速閾値以下であって且つ前記所定の狭路条件が成立している場合において、前記乗員が前記表示部を注視しているときには、前記表示部に前記周辺状況画像を表示させない、請求項1又は2に記載の表示装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、表示装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、ナビゲーション装置により取得した車両の現在位置周辺の道路地図情報を用いて狭路又は屈曲路への接近又は進入を判別し、判別結果に応じて映像の切り替えを行う技術が知られている(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2012-071832号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術では、ナビゲーション装置により取得した車両の現在位置周辺の道路地図情報を主として用いるため、判別結果は、車両の現在位置の精度及び道路地図情報の有無による影響を受けやすい。その結果、映像の切り替えが適切に行われない可能性がある。
【課題を解決するための手段】
【0005】
本開示の一態様に係る表示装置は、車両の周辺の状況を表す周辺状況画像を撮像するカメラを含み、車両の自動運転制御又は運転支援制御に用いられる車載の外部センサの検出結果に基づいて、車両が走行中の道路の幅を認識する道路幅認識部と、周辺状況画像を車載の表示部に表示させる表示制御部と、を備え、表示制御部は、少なくとも道路の幅及び車両の車速に基づいて、車速が所定の車速閾値以下であって且つ所定の狭路条件が成立している場合、表示部に周辺状況画像を表示させる。
【0006】
本開示の一態様に係る表示装置によれば、車速が所定の車速閾値以下であって且つ所定の狭路条件が成立している場合、表示部に周辺状況画像を表示させる。所定の狭路条件は、車両の自動運転制御又は運転支援制御に用いられる車載の外部センサの検出結果に基づいて認識した道路の幅に応じて成立する。より直接的に認識した道路の幅を用いて所定の狭路条件の成否を判断するため、例えばナビゲーション装置の地図情報を主に用いる場合と比べて、より適切な状況で周辺状況画像を表示部に自動表示することができる。
【0007】
一実施形態では、表示装置は、外部センサの検出結果に基づいて、車両の周辺の物体を認識する周辺物体認識部を備え、狭路条件は、道路が所定の極狭路である場合、或いは、道路が所定の極狭路よりも広い所定の狭路であり、且つ車両の前方の所定の距離閾値以内に対向車又は障害物が存在する場合、に成立してもよい。この場合、対向車又は障害物が存在しなくても車両の走行が容易ではない道路と、対向車又は障害物が存在することで車両の走行が容易ではない道路と、のいずれかの状況において、周辺状況画像を表示部に自動表示することができる。
【0008】
一実施形態では、表示装置は、外部センサの検出結果に基づいて、車両の周辺の物体を認識する周辺物体認識部を備え、狭路条件は、道路が所定の狭路よりも広く、車両の前方の道路の幅が減少し、且つ車両の前方の所定の距離閾値以内に対向車又は障害物が存在する場合、に成立してもよい。この場合、車両が現在走行している道路の幅が十分広くても、車両の走行に従って車両の走行が容易ではない道路の幅となる状況において、周辺状況画像を表示部に自動表示することができる。
【0009】
一実施形態では、表示装置は、車両の乗員を撮像する車内カメラの撮像画像に基づいて、車両の乗員の状態を認識する乗員状態認識部を備え、表示制御部は、車速が所定の車速閾値以下であって且つ所定の狭路条件が成立している場合において、乗員が表示部を注視しているときには、表示部に周辺状況画像を表示させなくてもよい。この場合、例えば周辺状況画像以外のコンテンツを見るために表示部を注視している乗員に対し、表示部に周辺状況画像を表示させることで与える煩わしさを抑制することができる。
【発明の効果】
【0010】
本開示のいくつかの態様によれば、例えばナビゲーション装置の地図情報を主に用いる場合と比べて、より適切な状況で周辺状況画像を表示部に自動表示することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
1か月前
個人
自動車ケアフル灯
29日前
個人
空飛ぶ自動車の空路
2か月前
個人
忘れ物検出装置
1か月前
個人
出会い頭事故防止装置
1か月前
能美防災株式会社
発信機
1か月前
個人
逆走・正走車両検出システム
9日前
株式会社島津製作所
警報装置
1か月前
日本信号株式会社
情報提供システム
8日前
日本信号株式会社
情報管理システム
1か月前
ホーチキ株式会社
監視システム
1か月前
株式会社SUBARU
車速制御システム
1か月前
個人
磁気・光学誘導路線による車両の運行制御
2日前
タック株式会社
安全監視システム
1か月前
合同会社ORIC-LAB
太陽光発電管理装置
1か月前
株式会社JVCケンウッド
通知システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
本田技研工業株式会社
路面評価装置
1か月前
本田技研工業株式会社
路面評価装置
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
日本信号株式会社
路側装置及びセンサ装置
1か月前
株式会社アジラ
注目行動呼びかけシステム
1か月前
トヨタ自動車株式会社
配車システム
1日前
河村電器産業株式会社
警報装置
1か月前
株式会社デンソー
運転支援装置
1か月前
能美防災株式会社
非常報知システム
16日前
トヨタ自動車株式会社
方法
1か月前
トヨタ自動車株式会社
車両
1か月前
株式会社 ミックウェア
情報処理装置、情報処理方法
1か月前
東亜電子工業株式会社
警報コントローラ
24日前
株式会社知財事業研究所
運行計画作成システム
1か月前
愛知時計電機株式会社
生活データ集計装置
1か月前
矢崎総業株式会社
路面監視装置
1か月前
エムケー精工株式会社
信号機および信号機の発光制御方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ