TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025036806
公報種別
公開特許公報(A)
公開日
2025-03-17
出願番号
2023143361
出願日
2023-09-05
発明の名称
溶接システム
出願人
日鉄エンジニアリング株式会社
,
日鉄溶接工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B23K
9/10 20060101AFI20250310BHJP(工作機械;他に分類されない金属加工)
要約
【課題】溶接部の遠隔監視を遅滞なく行うことができる溶接システムを提供する。
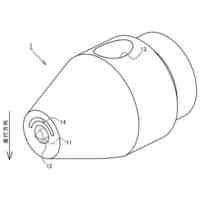
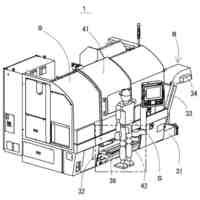
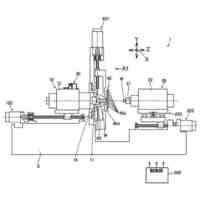
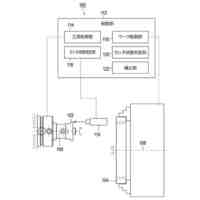
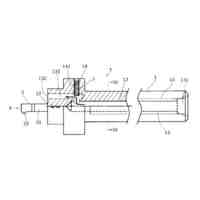
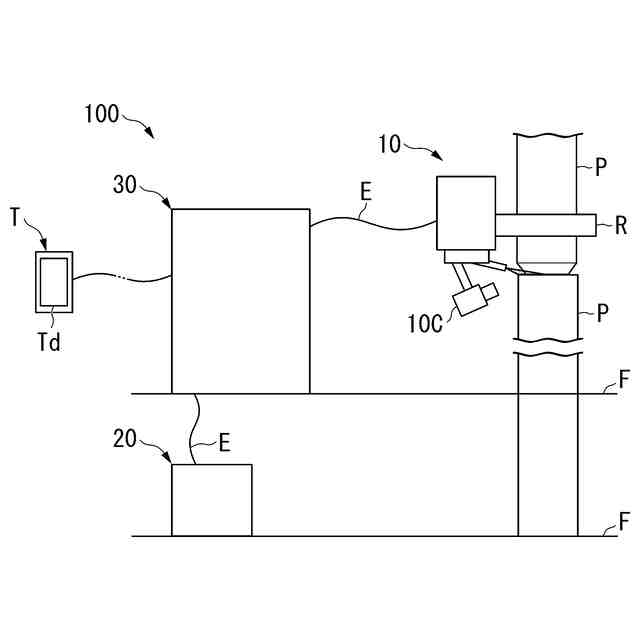
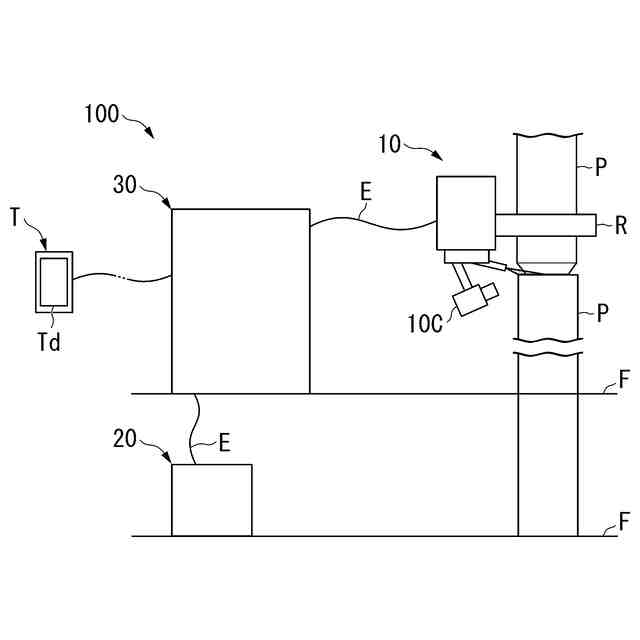
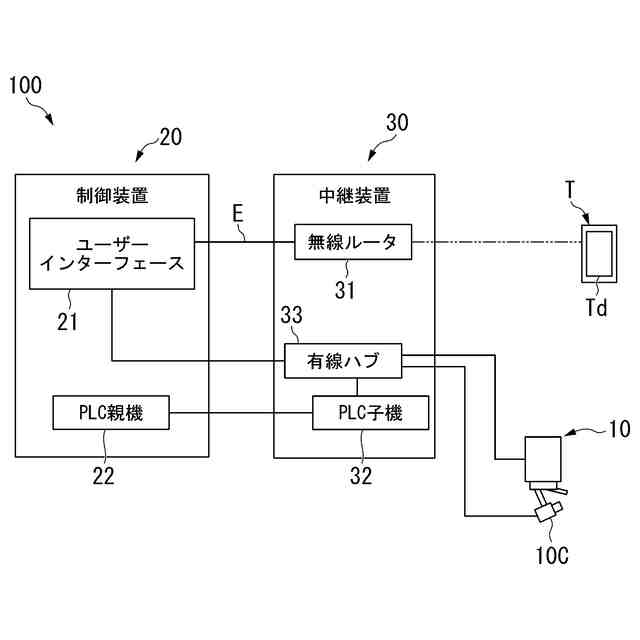
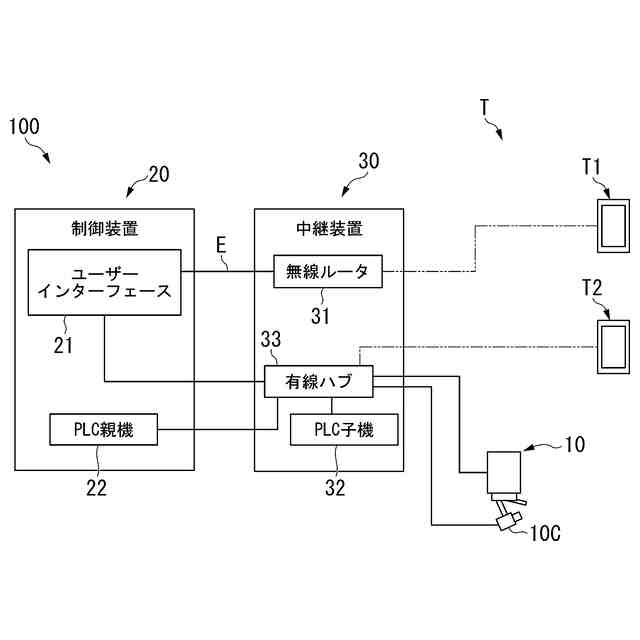
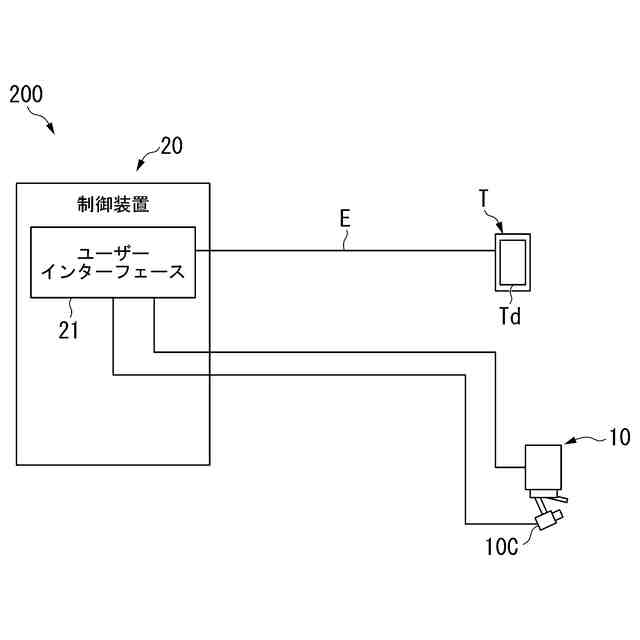
【解決手段】開先を撮像してカメラ画像データを出力するカメラ10C、を有する溶接ロボット10と、溶接ロボット10を制御するための制御信号を生成する制御装置20と、溶接ロボット10及び制御装置20と接続され、溶接ロボット10と制御装置20との間で情報を中継する中継装置30と、を備える溶接システム100であって、制御装置20は、溶接ロボット10を操作するための操作画像データを中継装置30に送信し、中継装置30は、制御装置20から送信される操作画像データを表示装置Tに送信し、カメラ10Cは、カメラ10Cが出力するカメラ画像データを表示装置Tに送信することを特徴とする。
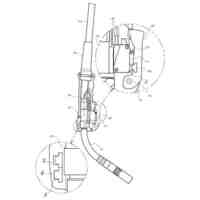
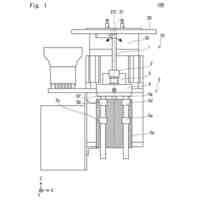
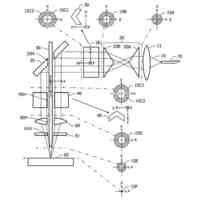
【選択図】図1
特許請求の範囲
【請求項1】
開先を撮像してカメラ画像データを出力するカメラ、を有する溶接ロボットと、
前記溶接ロボットを制御するための制御信号を生成する制御装置と、
前記溶接ロボット及び前記制御装置と接続され、前記溶接ロボットと前記制御装置との間で情報を中継する中継装置と、
を備える溶接システムであって、
前記制御装置は、前記溶接ロボットを操作するための操作画像データを前記中継装置に送信し、
前記中継装置は、前記制御装置から送信される操作画像データを表示装置に送信し、
前記カメラは、前記カメラが出力するカメラ画像データを表示装置に送信する、
ことを特徴とする溶接システム。
続きを表示(約 1,900 文字)
【請求項2】
前記中継装置は、前記制御装置から送信される操作画像データと、前記カメラが開先を撮像して出力するカメラ画像データと、を前記表示装置に送信する、
ことを特徴とする請求項1に記載の溶接システム。
【請求項3】
前記中継装置は、前記カメラから出力されるカメラ画像データを前記制御装置に送信し、
前記制御装置は、前記中継装置から送信されるカメラ画像データを前記制御装置が生成する操作画像データとともに、前記中継装置に送信し、
前記中継装置は、前記制御装置から送信されるカメラ画像データを前記制御装置から送信される操作画像データとともに、前記表示装置に送信する、
ことを特徴とする請求項2に記載の溶接システム。
【請求項4】
前記中継装置は、前記カメラから出力されるカメラ画像データを前記制御装置に送信し、
前記制御装置は、前記中継装置から送信されるカメラ画像データと、前記制御装置が生成する操作画像データと、を1つの画像データに合成し、前記操作画像データとして前記中継装置に送信する、
ことを特徴とする請求項1に記載の溶接システム。
【請求項5】
前記表示装置は、第1表示装置及び第2表示装置を含み、
前記中継装置は、前記制御装置が生成する操作画像データを、前記第1表示装置に送信し、前記カメラが出力するカメラ画像データを、前記第2表示装置に送信する、
ことを特徴とする請求項2又は3に記載の溶接システム。
【請求項6】
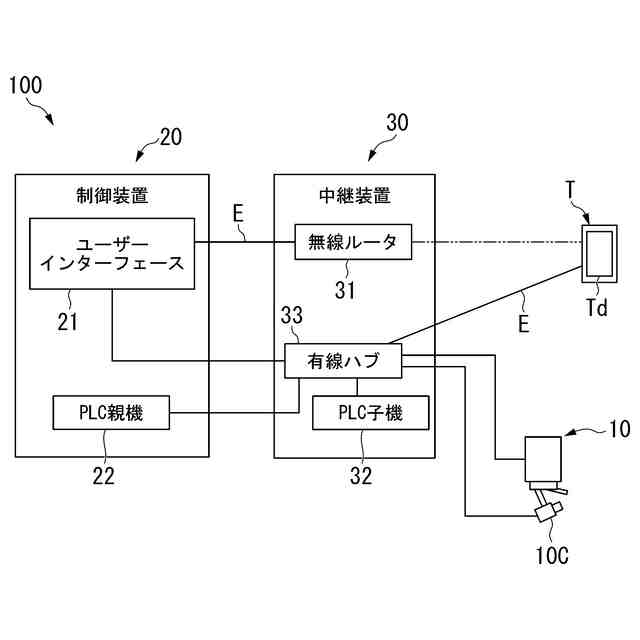
前記表示装置は、1台であり、
前記表示装置は、表示部に表示させる画像を、前記中継装置から送信される操作画像データに対応する操作画像から、前記カメラが出力するカメラ画像データに対応するカメラ画像に切り替えることができる、
ことを特徴とする請求項2又は3に記載の溶接システム。
【請求項7】
前記溶接ロボットが鋼材の溶接を開始するか否かを判定する判定手段、
を更に備え、
前記表示装置は、前記溶接ロボットが前記鋼材の溶接を開始すると前記判定手段が判定する場合に、前記表示部に表示させる画像を、前記操作画像から前記カメラ画像に切り替える、
ことを特徴とする請求項6に記載の溶接システム。
【請求項8】
前記カメラが出力するカメラ画像データを前記中継装置から前記制御装置に送信させるのか、又は、前記カメラが出力するカメラ画像データを前記中継装置から前記表示装置に送信させるのか、を前記中継装置に指示する指示手段、
を更に備え、
前記中継装置は、前記カメラが出力するカメラ画像データを前記中継装置から前記制御装置に送信させるように前記指示手段によって指示された場合は、前記カメラが出力するカメラ画像データを前記制御装置に送信し、前記カメラが出力するカメラ画像データを前記中継装置から前記表示装置に送信させるように前記指示手段によって指示された場合は、前記カメラが出力するカメラ画像データを前記表示装置に送信する、
ことを特徴とする請求項2に記載の溶接システム。
【請求項9】
前記カメラが出力するカメラ画像データのフレームレートが所定閾値を超えているか否かを判別する判別手段、
を更に備え、
前記指示手段は、前記フレームレートが所定閾値を超えていると判別手段が判別した場合に、前記カメラが出力するカメラ画像データを前記中継装置から前記制御装置に送信させるように前記中継装置に指示し、前記フレームレートが所定閾値を超えていないと判別手段が判別した場合に、前記カメラが出力するカメラ画像データを前記中継装置から前記表示装置に送信させるように前記中継装置に指示する、
ことを特徴とする請求項8に記載の溶接システム。
【請求項10】
前記カメラが出力するカメラ画像データのフレームレートが所定閾値を超えているか否かを判別する判別手段、
を更に備え、
前記中継装置は、前記フレームレートが所定閾値を超えていないと前記判別手段が判別した場合に、前記制御装置から送信される操作画像データに対応する操作画像と前記カメラが出力するカメラ画像データに対応するカメラ画像とを交互に表示するよう、前記表示装置を制御する、
ことを特徴とする請求項2に記載の溶接システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、溶接システムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
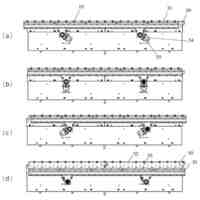
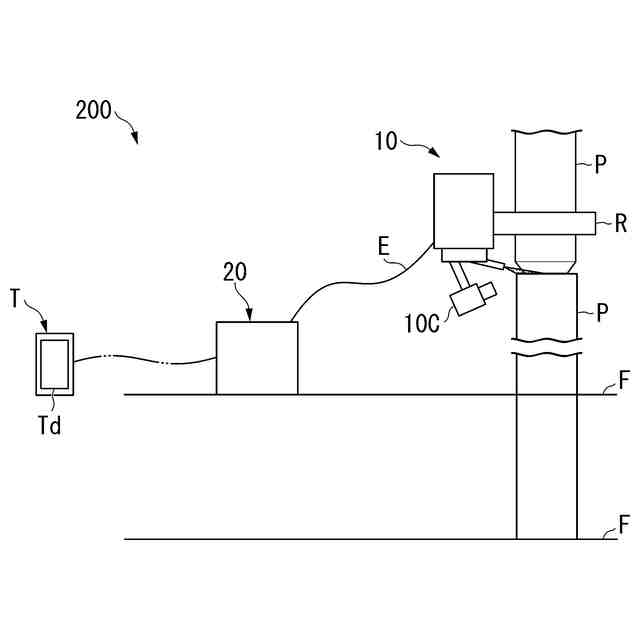
高層ビル等の大型建築物には、角形の鋼管を溶接により継ぎ足して形成された鋼管柱が用いられる。鋼管柱の溶接には、レールを自走しながら溶接作業を行う溶接ロボットが用いられる。
従来技術の一例である特許文献1では、溶接ロボットと、溶接ロボットを制御する制御装置と、の間の距離を離して設置することを目的として、溶接ロボットと、溶接ロボットを制御する制御装置とを、中継装置によって接続している。
【先行技術文献】
【特許文献】
【0003】
特開2023-10202号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
溶接ロボットによる鋼管柱の溶接作業中に、作業者が溶接部の状態をカメラで遠隔監視しながら狙い位置の調整をすることがある。このとき、溶接システム内においてデータが伝送される経路や、制御装置及び中継装置の処理能力によっては、カメラ画像データのフレームレートが低下する等、データの伝送に遅滞が生じることがある。すると、溶接作業中に表示装置に表示されるカメラ画像がコマ落ちする等の事象により、狙い位置を正確に調整することができなくなる問題がある。
【0005】
本発明は、前述した事情に鑑みてなされたものであって、溶接部の遠隔監視を遅滞なく行うことができる溶接システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
<1>本発明の態様1に係る溶接システムは、開先を撮像してカメラ画像データを出力するカメラ、を有する溶接ロボットと、前記溶接ロボットを制御するための制御信号を生成する制御装置と、前記溶接ロボット及び前記制御装置と接続され、前記溶接ロボットと前記制御装置との間で情報を中継する中継装置と、を備える溶接システムであって、前記制御装置は、前記溶接ロボットを操作するための操作画像データを前記中継装置に送信し、前記中継装置は、前記制御装置から送信される操作画像データを表示装置に送信し、前記カメラは、前記カメラが出力するカメラ画像データを表示装置に送信することを特徴とする。
【0007】
態様1によれば、制御装置は、溶接ロボットを操作するための操作画像データを中継装置に送信し、中継装置は、制御装置から送信される操作画像データを表示装置に送信する。これにより、表示装置が制御装置から離れた位置にあっても、表示装置に操作画像データを表示することができる。したがって、例えば、表示装置を溶接ロボットから離れた位置に配置することができる。このことで、作業者は、溶接ロボットから十分に離れた位置でカメラ画像データを確認することができる。よって、作業者が安全に作業を行うことができる。
また、制御装置が操作画像データを生成することで、例えば、表示装置が操作画像データを生成する場合と比較して、データ処理を速くすることができる。
更に、溶接ロボットが備えるカメラは、当該カメラが出力するカメラ画像データを表示装置に送信する。すなわち、例えば、カメラ画像データが、制御装置を介することなく、表示装置に送信されることも可能となる。これにより、制御装置を介することによるデータ伝送の遅滞を抑え、カメラによる溶接部の遠隔監視を遅滞なく行うことができる。また、データ処理を速くすることができることで、例えば、表示装置に表示されるカメラ画像データの解像度を高くすることや、カメラ画像データのフレームレートを高くすることができる。
したがって、溶接システムの操作性を向上させることができる。
【0008】
<2>本発明の態様2に係る溶接システムは、態様1に係る溶接システムにおいて、前記中継装置は、前記制御装置から送信される操作画像データと、前記カメラが開先を撮像して出力するカメラ画像データと、を前記表示装置に送信することを特徴とする。
【0009】
態様2によれば、中継装置は、制御装置から送信される操作画像データと、カメラが開先を撮像して出力するカメラ画像データと、を表示装置に送信する。これにより、表示装置が制御装置から離れた位置にあっても、表示装置に操作画像データ及びカメラ画像データを表示することができる。したがって、例えば、表示装置を溶接ロボットから離れた位置に配置することができる。このことで、作業者は、溶接ロボットから十分に離れた位置でカメラ画像データ及びカメラ画像データを確認することができる。よって、作業者が安全に作業を行うことができる。
また、例えば、表示装置が操作画像データを生成する場合と比較して、データ処理を速くすることができる。
更に、中継装置が、カメラが開先を撮像して出力するカメラ画像データを表示装置に送信する。すなわち、例えば、カメラ画像データが、カメラから中継装置のみを介して、表示装置に送信されることも可能となる。これにより、制御装置を介することによるデータ伝送の遅滞を抑え、カメラによる溶接部の遠隔監視を遅滞なく行うことができる。また、データ処理を速くすることができることで、例えば、表示装置に表示されるカメラ画像データの解像度を高くすることや、カメラ画像データのフレームレートを高くすることができる。
したがって、溶接システムの操作性を向上させることができる。
【0010】
<3>本発明の態様3に係る溶接システムは、態様1又は態様2に係る溶接システムにおいて、前記中継装置は、前記カメラから出力されるカメラ画像データを前記制御装置に送信し、前記制御装置は、前記中継装置から送信されるカメラ画像データを前記制御装置が生成する操作画像データとともに、前記中継装置に送信し、前記中継装置は、前記制御装置から送信されるカメラ画像データを前記制御装置から送信される操作画像データとともに、前記表示装置に送信することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
スラッジ除去装置
1か月前
個人
作業用治具
4か月前
個人
トーチノズル
4か月前
シヤチハタ株式会社
組立ライン
4か月前
日東精工株式会社
ねじ締め装置
4日前
日東精工株式会社
組み付け装置
4か月前
有限会社津谷工業
切削工具
3か月前
株式会社FUJI
工作機械
20日前
個人
複合金属回転式ホーン
1か月前
株式会社FUJI
工作機械
1か月前
エンシュウ株式会社
工作機械
4か月前
株式会社ダイヘン
積層造形溶接方法
24日前
株式会社不二越
タップ
3か月前
トヨタ自動車株式会社
積層コア
2か月前
株式会社トーキン
溶接用トーチ
1か月前
株式会社ダイヘン
アーク溶接制御方法
3か月前
トヨタ自動車株式会社
検査方法
1か月前
ダイハツ工業株式会社
冷却構造
4か月前
株式会社ナベヤ
締結装置
24日前
トヨタ自動車株式会社
取付装置
1か月前
株式会社ツガミ
工作機械
1か月前
株式会社ツガミ
工作機械
1か月前
株式会社メドメタレックス
ドリル
2か月前
オークマ株式会社
診断装置
10日前
株式会社不二越
歯車研削盤
3か月前
オークマ株式会社
工作機械
10日前
大和ハウス工業株式会社
溶接方法
5日前
株式会社不二越
歯車研削盤
1か月前
株式会社不二越
歯車加工機
3か月前
株式会社オーエム製作所
工作機械
1か月前
株式会社メタルクリエイト
切削装置
4か月前
株式会社関本管工
エルボ管保持装置
1か月前
スター精密株式会社
工作機械
4日前
三菱電機株式会社
ねじ取り出し装置
2か月前
株式会社ダイヘン
溶接トーチ
1か月前
住友重機械工業株式会社
レーザ装置
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ