TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025031623
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2024137735
出願日
2024-08-19
発明の名称
制御システム
出願人
ソフトバンクグループ株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
G06Q
50/10 20120101AFI20250228BHJP(計算;計数)
要約
【課題】ユーザに危険が迫っている場合に、ユーザの安全の度合を向上できる制御システムを得る。
【解決手段】制御システムは、状態認識部と、感情決定部と、行動決定部と、を含み、電子機器は、自動走行をすることが可能な移動部に設けられ、電子機器は、ユーザの周囲の状況に関する情報を収集する1又は複数のセンサを含み、行動決定部は、ユーザの周囲の状況に関する情報に基づき、ユーザに危険が迫っていることが検出された場合に、電子機器の行動として、前記ユーザの身代わりとなる行動をとることを決定する。
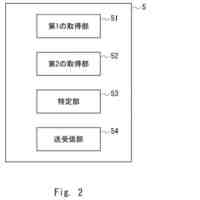
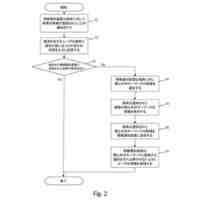
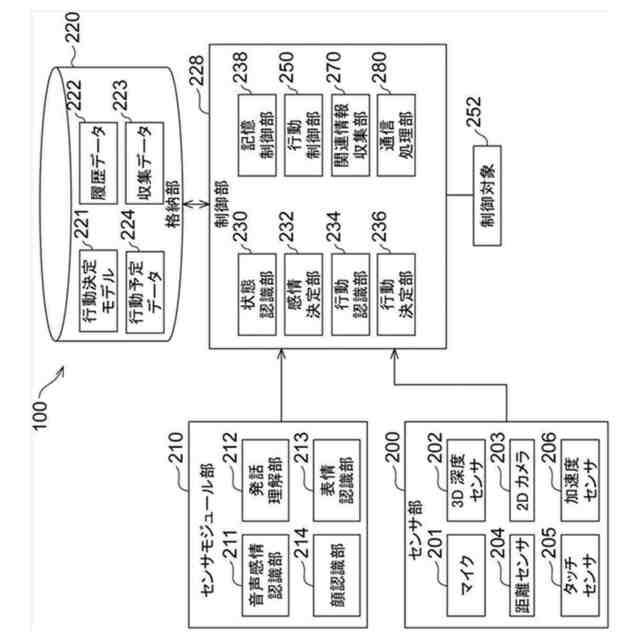
【選択図】図2
特許請求の範囲
【請求項1】
ユーザの行動を含むユーザ状態、及び電子機器の状態を認識する状態認識部と、
前記ユーザの感情又は前記電子機器の感情を判定する感情決定部と、
所定のタイミングで、前記ユーザ状態、前記電子機器の状態、前記ユーザの感情、及び前記電子機器の感情の少なくとも一つと、行動決定モデルとを用いて、作動しないことを含む複数種類の機器作動の何れかを、前記電子機器の行動として決定する行動決定部と、
を含み、
前記電子機器は、自動走行をすることが可能な移動部に設けられ、
前記電子機器は、前記ユーザの周囲の状況に関する情報を収集する1又は複数のセンサを含み、
前記行動決定部は、前記ユーザの周囲の状況に関する情報に基づき、前記ユーザに危険が迫っていることが検出された場合に、前記電子機器の行動として、前記ユーザの身代わりとなる行動をとることを決定する制御システム。
続きを表示(約 840 文字)
【請求項2】
前記ユーザに危険が迫っている状況は、前記ユーザに物体が接近してきている状況であり、
前記行動決定部は、前記ユーザの身代わりとなる行動として、前記電子機器を前記物体と前記ユーザとの間となる位置へ移動させる行動を行うことを決定する請求項1記載の制御システム。
【請求項3】
前記物体は、車両、人、動物の何れかである請求項2記載の制御システム。
【請求項4】
前記行動決定部は、更に、前記ユーザが前記物体から遠ざかる方向又は位置へ避難するよう前記ユーザを誘導することを決定する請求項2記載の制御システム。
【請求項5】
前記ユーザに危険が迫っている状況は、前記ユーザが現在位置している場所における発雷確率が所定値以上になった状況であり、
前記行動決定部は、前記ユーザの身代わりとなる行動として、前記電子機器を現在の位置に留まらせる行動を行うことを決定する請求項1記載の制御システム。
【請求項6】
前記行動決定部は、更に、前記ユーザが現在位置している場所から安全な場所へ避難するよう前記ユーザを誘導することを決定する請求項5記載の制御システム。
【請求項7】
前記電子機器は、通信端末であり、
前記行動決定部は、行動しないことを含む複数種類の前記ユーザと対話するためのエージェントの行動の何れかを、前記通信端末の行動として決定する請求項1記載の制御システム。
【請求項8】
前記行動決定モデルは、対話機能を有する文章生成モデルであり、
前記行動決定部は、前記ユーザ状態、前記エージェントの状態、前記ユーザの感情、及び前記エージェントの感情の少なくとも一つを表すテキストと、前記エージェントの行動を質問するテキストとを前記文章生成モデルに入力し、前記文章生成モデルの出力に基づいて、前記通信端末の行動を決定する請求項7記載の制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御システムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
特許文献1には、ユーザの状態に対してロボットの適切な行動を決定する技術が開示されている。特許文献1の従来技術は、ロボットが特定の行動を実行したときのユーザの反応を認識し、認識したユーザの反応に対するロボットの行動を決定できなかった場合、認識したユーザの状態に適した行動に関する情報をサーバから受信することで、ロボットの行動を更新する。
【先行技術文献】
【特許文献】
【0003】
特許6053847号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら従来技術では、電子機器が特定位置に静止した状態でユーザを支援するため、ユーザを支援する上で改善の余地がある。
【課題を解決するための手段】
【0005】
本発明の第1の態様によれば、制御システムが提供される。当該制御システムは、ユーザの行動を含むユーザ状態、及び電子機器の状態を認識する状態認識部と、前記ユーザの感情又は前記電子機器の感情を判定する感情決定部と、所定のタイミングで、前記ユーザ状態、前記電子機器の状態、前記ユーザの感情、及び前記電子機器の感情の少なくとも一つと、行動決定モデルとを用いて、作動しないことを含む複数種類の機器作動の何れかを、前記電子機器の行動として決定する行動決定部と、を含み、前記電子機器は、自動走行をすることが可能な移動部に設けられ、前記電子機器は、前記ユーザの周囲の状況に関する情報を収集する1又は複数のセンサを含み、前記行動決定部は、前記ユーザの周囲の状況に関する情報に基づき、前記ユーザに危険が迫っていることが検出された場合に、前記電子機器の行動として、前記ユーザの身代わりとなる行動をとることを決定する。
電子機器は、通信端末を含む。ここで、通信端末とは、物理的な動作を行う装置、物理的な動作を行わずに映像や音声を出力する装置、及びソフトウェア上で動作するエージェントを含む。
【図面の簡単な説明】
【0006】
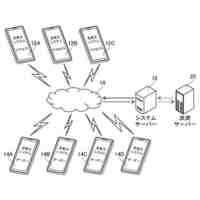
第1実施形態に係るシステム5の一例を概略的に示す。
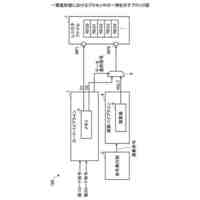
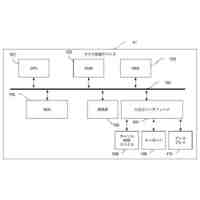
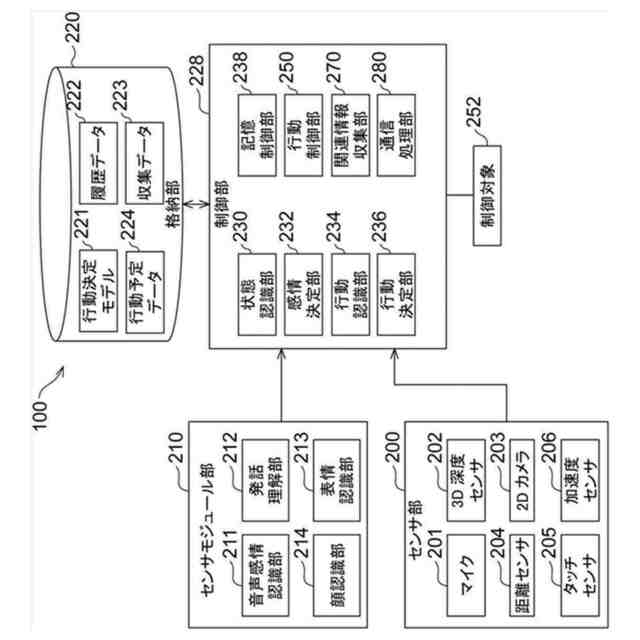
第1実施形態に係るロボット100の機能構成を概略的に示す。
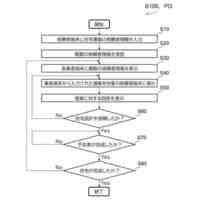
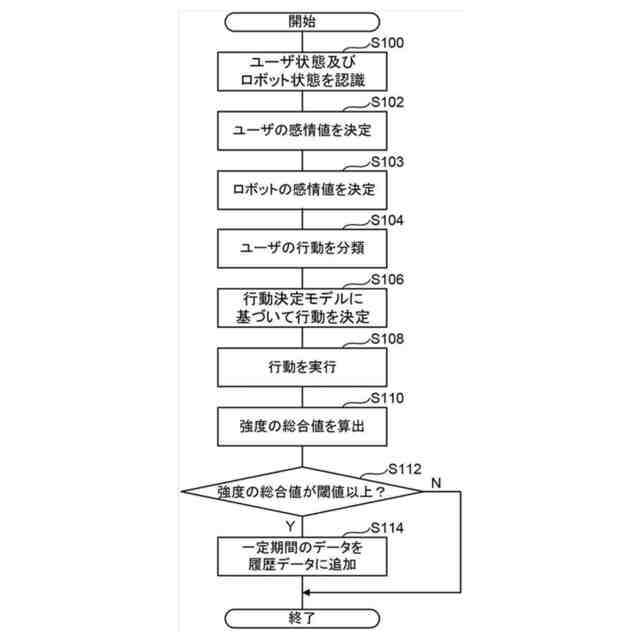
第1実施形態に係るロボット100による収集処理の動作フローの一例を概略的に示す。
第1実施形態に係るロボット100による応答処理の動作フローの一例を概略的に示す。
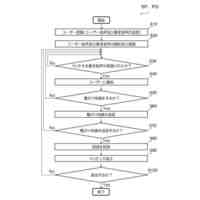
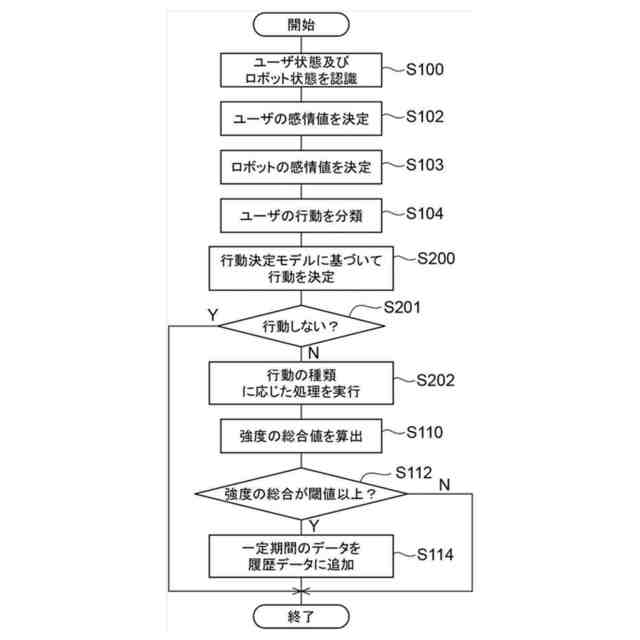
第1実施形態に係るロボット100による自律的処理の動作フローの一例を概略的に示す。
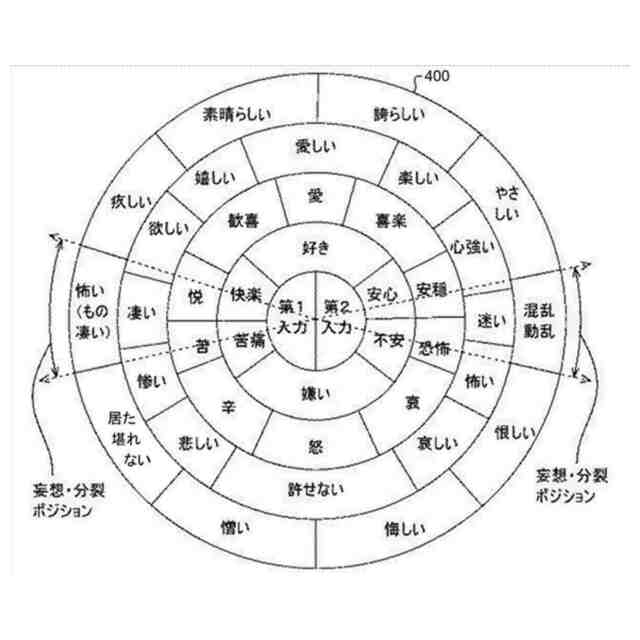
複数の感情がマッピングされる感情マップ400を示す。
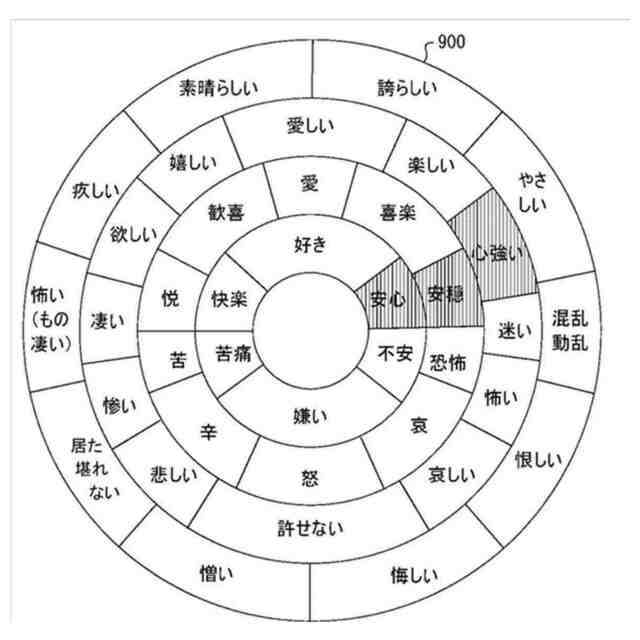
複数の感情がマッピングされる感情マップ900を示す。
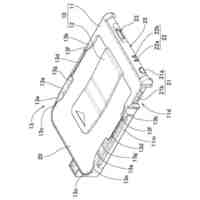
(A)第2実施形態に係るぬいぐるみ100Nの外観図、(B)ぬいぐるみ100Nの内部構造図である。
第2実施形態に係るぬいぐるみ100Nの背面正面図である。
第2実施形態に係るぬいぐるみ100Nの機能構成を概略的に示す。
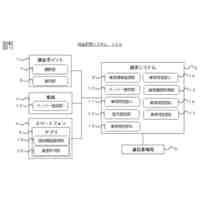
第3実施形態に係るエージェントシステム500の機能構成を概略的に示す。
エージェントシステムの動作の一例を示す。
エージェントシステムの動作の一例を示す。
第4実施形態に係るスマート眼鏡700の機能構成を概略的に示す。
スマート眼鏡によるエージェントシステムの利用態様の一例を示す。
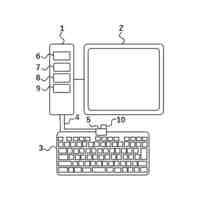
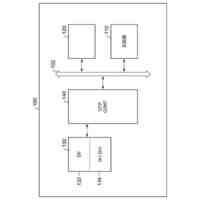
コンピュータ1200のハードウェア構成の一例を概略的に示す。
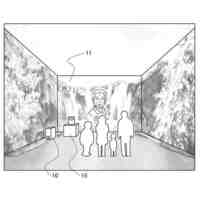
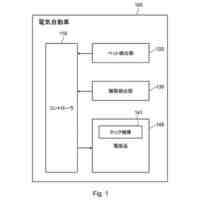
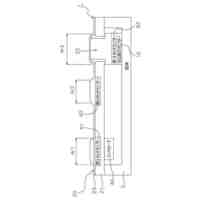
移動部及び通信端末を含む移動システムの外観図である。
移動部及び通信端末を含む移動システムの外観図である。
移動部及び通信端末を含む移動システムが再生する画像などの例を示す図である。
移動部及び通信端末を含む移動システムが再生する画像などの例を示す図である。
移動部及び通信端末を含む移動システムが再生する画像などの例を示す図である。
移動部及び通信端末を含む移動システムが再生する画像などの例を示す図である。
移動部及び通信端末を含む移動システムが再生する画像などの例を示す図である。
移動部及び端末を含む移動システムが再生する画像などの例を示す図である。
物体がユーザに接近している状況を示す図である。
移動システムがユーザの身代わりとなって物体と衝突する状況を示す図である。
【発明を実施するための形態】
【0007】
以下、発明の実施の形態を通じて本発明を説明するが、以下の実施形態は特許請求の範囲にかかる発明を限定するものではない。また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【0008】
[第1実施形態]
図1は、本実施形態に係るシステム5の一例を概略的に示す。システム5は、ロボット100、ロボット101、ロボット102、及びサーバ300を備える。ユーザ10a、ユーザ10b、ユーザ10c、及びユーザ10dは、ロボット100のユーザである。ユーザ11a、ユーザ11b及びユーザ11cは、ロボット101のユーザである。ユーザ12a及びユーザ12bは、ロボット102のユーザである。なお、本実施形態の説明において、ユーザ10a、ユーザ10b、ユーザ10c、及びユーザ10dを、ユーザ10と総称する場合がある。また、ユーザ11a、ユーザ11b及びユーザ11cを、ユーザ11と総称する場合がある。また、ユーザ12a及びユーザ12bを、ユーザ12と総称する場合がある。ロボット101及びロボット102は、ロボット100と略同一の機能を有する。そのため、ロボット100の機能を主として取り上げてシステム5を説明する。
【0009】
ロボット100は、ユーザ10と会話を行ったり、ユーザ10に映像を提供したりする。このとき、ロボット100は、通信網20を介して通信可能なサーバ300等と連携して、ユーザ10との会話や、ユーザ10への映像等の提供を行う。例えば、ロボット100は、自身で適切な会話を学習するだけでなく、サーバ300と連携して、ユーザ10とより適切に会話を進められるように学習を行う。また、ロボット100は、撮影したユーザ10の映像データ等をサーバ300に記録させ、必要に応じて映像データ等をサーバ300に要求して、ユーザ10に提供する。
【0010】
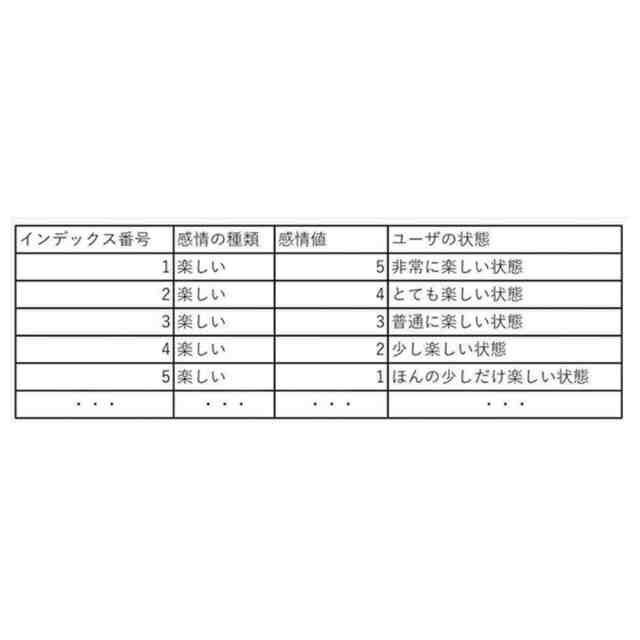
また、ロボット100は、自身の感情の種類を表す感情値を持つ。例えば、ロボット100は、「喜」、「怒」、「哀」、「楽」、「快」、「不快」、「安心」、「不安」、「悲しみ」、「興奮」、「心配」、「安堵」、「充実感」、「虚無感」及び「普通」のそれぞれの感情の強さを表す感情値を持つ。ロボット100は、例えば興奮の感情値が大きい状態でユーザ10と会話するときは、早いスピードで音声を発する。このように、ロボット100は、自己の感情を行動で表現することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
プログラム
6日前
個人
情報提示方法
1か月前
個人
プログラム
1か月前
個人
プログラム
1か月前
株式会社理研
演算装置
13日前
個人
アカウントマップ
1か月前
個人
日本語入力支援システム
13日前
個人
市場受発注システム
1か月前
個人
AI旅行最適化プラグイン
12日前
個人
発想支援方法及びシステム
1か月前
個人
案件管理装置および端末装置
27日前
個人
学習装置及び推論装置
1か月前
個人
分類処理プログラム及び方法
1か月前
個人
納骨堂システム
5日前
個人
技術実行管理システム
今日
株式会社発明屋
電池指向の構造設計
1か月前
富士通株式会社
金融システム
1か月前
トヨタ自動車株式会社
管理装置
1か月前
キヤノン株式会社
情報処理装置
13日前
株式会社プレニーズ
仲介システム
1か月前
個人
ダブルオークションシステム
23日前
株式会社イズミ
総合代行システム
23日前
トヨタ自動車株式会社
電気自動車
19日前
富士通株式会社
プロセッサ
1か月前
村田機械株式会社
人員配置システム
1か月前
トヨタ自動車株式会社
情報通知方法
1か月前
富士通株式会社
予測
26日前
ブラザー工業株式会社
無線通信装置
1か月前
トヨタ自動車株式会社
生成装置
1か月前
NISSHA株式会社
入力装置
1か月前
株式会社SUBARU
車両用操作装置
19日前
合同会社IPマネジメント
料金収受システム
26日前
株式会社TIMEWELL
情報処理システム
6日前
AICRO株式会社
情報処理システム
1か月前
ローム株式会社
半導体集積回路
9日前
マクセル株式会社
リーダライタ用ホルダ
26日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ