TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025030906
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023136596
出願日
2023-08-24
発明の名称
サスペンション制御システム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
主分類
B60G
17/015 20060101AFI20250228BHJP(車両一般)
要約
【課題】路面変位関連値の有無の境界での振動発生を抑制できるサスペンション制御システムを提供する。
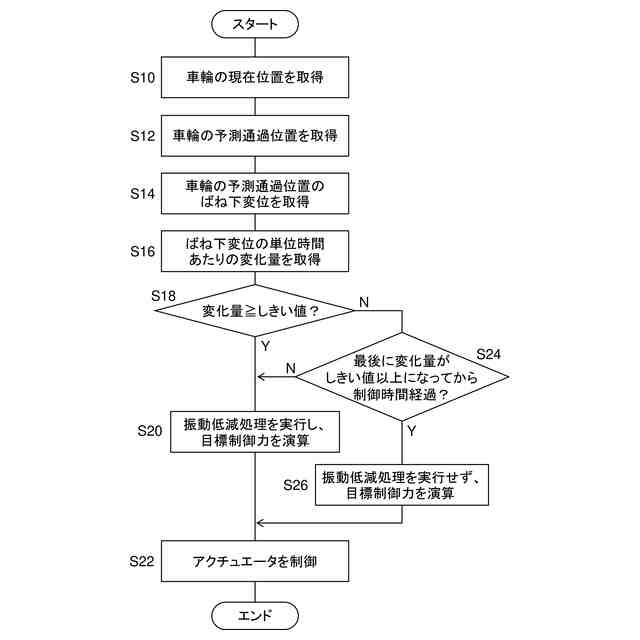
【解決手段】アクチュエータは、車両の制御対象輪のサスペンションストロークを調整する。第1取得部80は、路面の上下方向の変位に関連する路面変位関連値と位置とが関連付けられている路面データマップから、現在時刻から所定時間後の制御対象輪の予測通過位置における路面変位関連値を繰り返し取得する。第2取得部82は、路面変位関連値の単位時間あたりの変化量を取得する。制御部88は、制御対象輪が予測通過位置を通過する時にアクチュエータが発生する制御力が目標制御力に一致するように、アクチュエータを制御する。演算部86は、路面変位関連値の単位時間あたりの変化量がしきい値以上である場合、当該変化量がしきい値未満である場合と比較して目標制御力の単位時間あたりの変化量が小さくなるように、目標制御力を演算する。
【選択図】図4
特許請求の範囲
【請求項1】
車両の制御対象輪のサスペンションストロークを調整するアクチュエータと、
前記アクチュエータを制御する制御装置と、
を備え、
前記制御装置は、
路面の上下方向の変位に関連する路面変位関連値と位置とが関連付けられている路面データマップから、現在時刻から所定時間後の前記制御対象輪の予測通過位置における路面変位関連値を繰り返し取得する第1取得部と、
取得された路面変位関連値にもとづいて、路面変位関連値の単位時間あたりの変化量を取得する第2取得部と、
取得された路面変位関連値にもとづいて目標制御力を演算する演算部と、
前記制御対象輪が前記予測通過位置を通過する時に前記アクチュエータが発生する制御力が前記目標制御力に一致するように、当該アクチュエータを制御する制御部と、
を有し、
前記演算部は、取得された路面変位関連値の単位時間あたりの変化量がしきい値以上である場合、当該変化量が当該しきい値未満である場合と比較して前記目標制御力の単位時間あたりの変化量が小さくなるように、当該目標制御力を演算する、
ことを特徴とするサスペンション制御システム。
続きを表示(約 720 文字)
【請求項2】
前記演算部は、取得された路面変位関連値の単位時間あたりの変化量が前記しきい値以上である場合、取得された路面変位関連値の時系列データまたは前記目標制御力の時系列データに対してレートリミッタまたはローパスフィルタを適用することで、前記目標制御力の単位時間あたりの変化量が小さくなるように当該目標制御力を演算する、
ことを特徴とする請求項1に記載のサスペンション制御システム。
【請求項3】
前記演算部は、取得された路面変位関連値の単位時間あたりの変化量が前記しきい値以上である場合、所定の制御時間の間、前記レートリミッタまたは前記ローパスフィルタを適用する、
ことを特徴とする請求項2に記載のサスペンション制御システム。
【請求項4】
前記演算部は、取得された路面変位関連値の単位時間あたりの変化量が前記しきい値以上である場合、当該変化量が大きいほど、前記目標制御力の単位時間あたりの変化量の低減量が大きくなるように、当該目標制御力を演算する、
ことを特徴とする請求項1から3のいずれかに記載のサスペンション制御システム。
【請求項5】
前記制御部は、前記アクチュエータを制御することにより、前記ばね上構造体の振動を低減するためのフィードバック制御をさらに実行し、
前記演算部は、取得された路面変位関連値の単位時間あたりの変化量が前記しきい値以上である場合、当該変化量が当該しきい値未満である場合と比較して、フィードバック制御のフィードバックゲインを大きくする、
ことを特徴とする請求項1から3のいずれかに記載のサスペンション制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、サスペンション制御システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1は、車両の制振制御装置を開示する。制振制御装置は、測定データに基いて、通過予測位置における路面変位関連値をプレビュー情報として取得し、プレビュー情報を用いて演算された第1目標制御力を含む最終目標制御力に基いて制御力発生装置を制御するプレビュー制振制御を実行する。測定データは、測定車両が路面を実際に走行したときに取得された路面変位関連値と、当該路面変位関連値が取得されたときの位置を表す位置情報とが関連付けられたデータを含む。制振制御装置は、路面状態が過去の時点から変化した蓋然性が高いと判定した場合、第1目標制御力の大きさを小さく設定する。
【先行技術文献】
【特許文献】
【0003】
特開2022-064361号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
プレビュー制振制御中に、測定データのマップの路面変位関連値の有無が混在した領域を車両が走行する場合、路面変位関連値の有無の境界で、路面変位関連値がある値からゼロに、または、ゼロからある値に変化する。そのため、この境界で実際には路面に段差がない場合であっても、振動が発生する可能性がある。このような振動発生を抑制することが望まれる。
【0005】
本発明の目的は、路面変位関連値の有無の境界での振動発生を抑制できるサスペンション制御システムを提供することにある。
【課題を解決するための手段】
【0006】
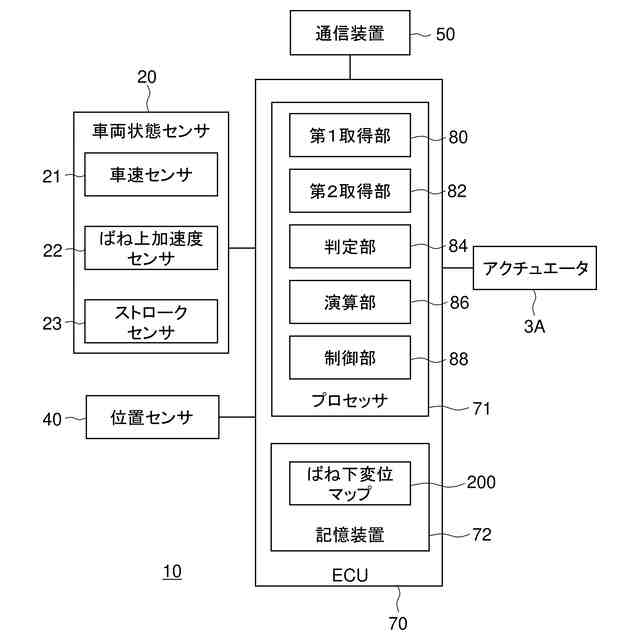
上記課題を解決するために、本発明のある態様のサスペンション制御システムは、車両の制御対象輪のサスペンションストロークを調整するアクチュエータと、前記アクチュエータを制御する制御装置と、を備える。前記制御装置は、路面の上下方向の変位に関連する路面変位関連値と位置とが関連付けられている路面データマップから、現在時刻から所定時間後の前記制御対象輪の予測通過位置における路面変位関連値を繰り返し取得する第1取得部と、取得された路面変位関連値にもとづいて、路面変位関連値の単位時間あたりの変化量を取得する第2取得部と、取得された路面変位関連値にもとづいて目標制御力を演算する演算部と、前記制御対象輪が前記予測通過位置を通過する時に前記アクチュエータが発生する制御力が前記目標制御力に一致するように、当該アクチュエータを制御する制御部と、を有する。前記演算部は、取得された路面変位関連値の単位時間あたりの変化量がしきい値以上である場合、当該変化量が当該しきい値未満である場合と比較して前記目標制御力の単位時間あたりの変化量が小さくなるように、当該目標制御力を演算する。
【発明の効果】
【0007】
本発明によれば、路面変位関連値の有無の境界での振動発生を抑制できるサスペンション制御システムを提供できる。
【図面の簡単な説明】
【0008】
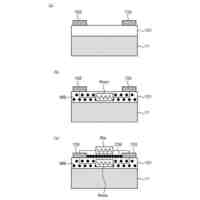
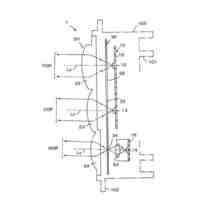
図1(a),(b)は、路面変位関連値のマップの一例を示す図である。
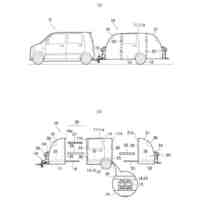
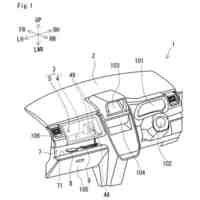
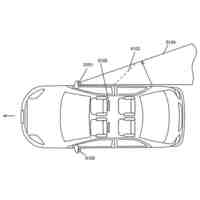
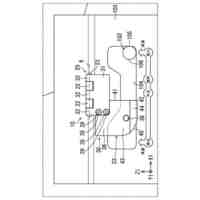
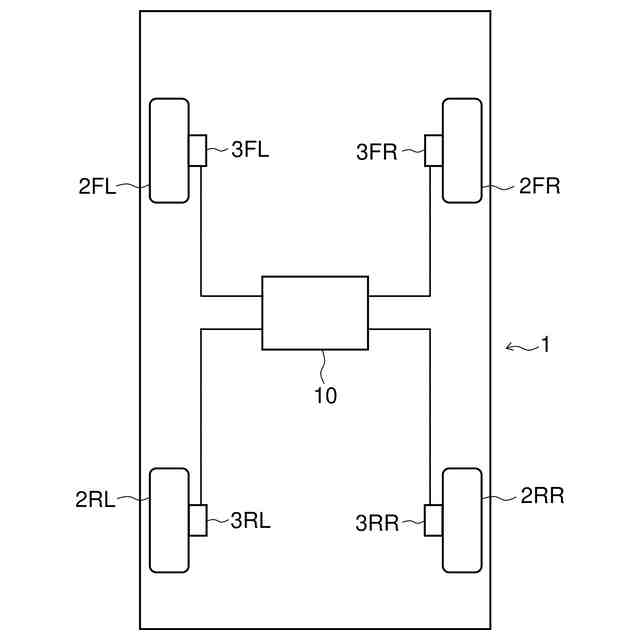
実施の形態の車両の構成を概略的に示す図である。
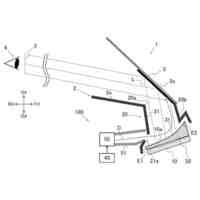
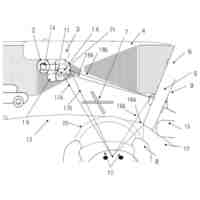
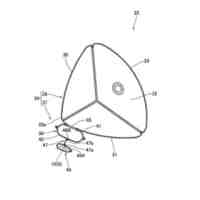
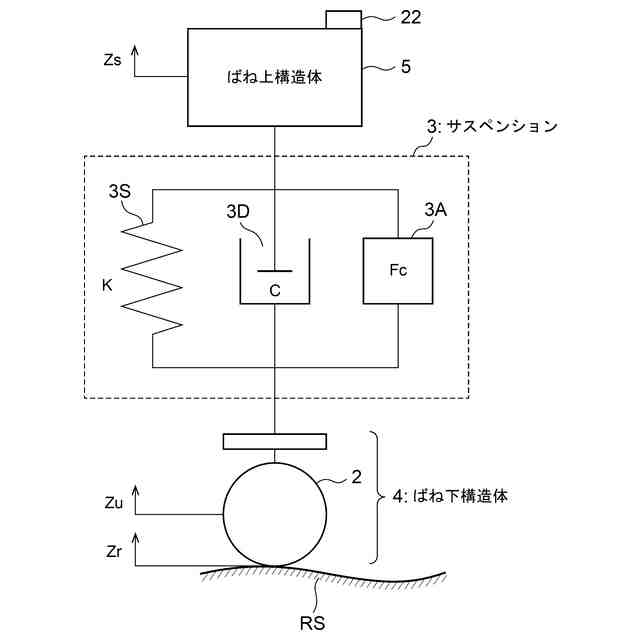
図2のサスペンションの構成を概略的に示す図である。
実施の形態のサスペンション制御システムの構成例を示すブロック図である。
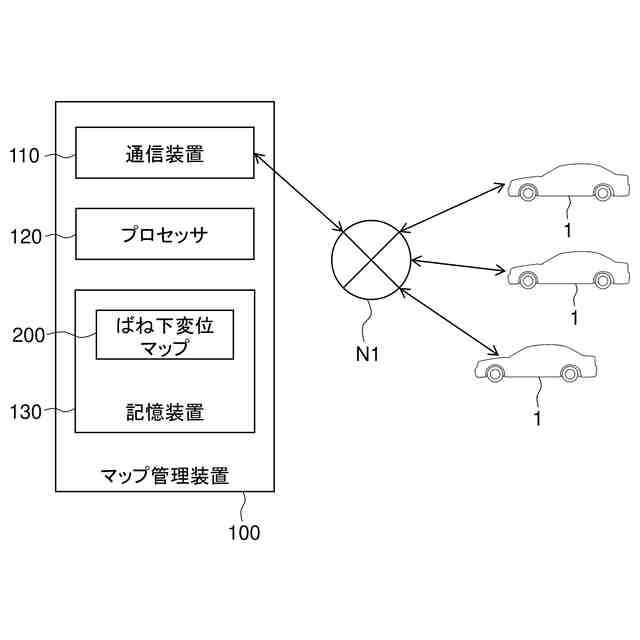
実施の形態のマップ管理装置の構成例を示すブロック図である。
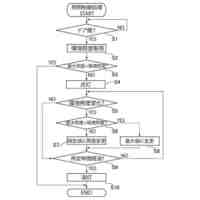
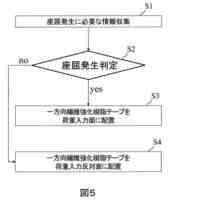
実施の形態のサスペンション制御処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
実施の形態を具体的に説明する前に、基礎となった知見を説明する。路面変位関連値に基づいたプレビュー制御を行う場合、マップがある箇所が続けば良好に制御可能であり、マップが無い箇所が続けばプレビュー制御ができないだけである。マップがあるとは、路面変位関連値があることを表す。マップが無いとは、路面変位関連値がなく、その値がゼロであることを表す。路面変位関連値は、ばね下変位などである。しかし、既述のように、マップ有無が混在した状況の場合、その境界で実際には段差が無いにもかかわらず、車両のばね上構造体に振動が生じ得る。また、マップが上手く生成されていないケース、すなわちマップ有無が混在したり、センサ値異常等によって異常値がマップに格納されたりしているケースでも、同様の課題が生じる。
【0010】
図1(a),(b)は、路面変位関連値のマップの一例を示す。このマップでは、色の濃淡で路面変位関連値の大きさを表す。色の濃淡が均一な領域302は、マップがなく、路面変位関連値はゼロであることを表す。図1(a),(b)に示すマップの状態である場合、比較例のプレビュー制御では、走行経路によっては、実際には段差が無くても路面変位関連値が大きく変化するため振動が生じ得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
21日前
個人
授乳用車両
1か月前
個人
眼科手術車
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
2か月前
個人
台車用車輪止め具
2か月前
個人
キャンピングトレーラー
2か月前
日本精機株式会社
車載表示装置
2か月前
日本精機株式会社
車載表示装置
3か月前
個人
謝意シグナル装着車
2か月前
日本精機株式会社
車両用表示装置
3か月前
トヨタ自動車株式会社
車両
2か月前
マツダ株式会社
車両
3日前
マツダ株式会社
車両
3日前
トヨタ自動車株式会社
車両
3か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用照明装置
25日前
株式会社青木製作所
タンクローリ
2か月前
日本精機株式会社
車両用表示装置
1か月前
マツダ株式会社
車両
1か月前
東レ株式会社
車両用部材の補強方法
2か月前
株式会社小糸製作所
投影装置
1か月前
ダイハツ工業株式会社
車両構造
2か月前
豊田合成株式会社
乗員保護装置
2か月前
YKS特許評価株式会社
自動車
3か月前
個人
Aピラー死角エリヤ確認用ミラー
3日前
バルミューダ株式会社
電動車両
25日前
株式会社SUBARU
保護構造
1か月前
個人
タイヤ洗浄装置の軸受構造
2か月前
豊田合成株式会社
乗員保護装置
1か月前
豊田合成株式会社
乗員保護装置
1か月前
株式会社SUBARU
保護構造
1か月前
関西広域輸送協同組合
制限装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ