TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025030609
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023136070
出願日
2023-08-24
発明の名称
車載外界認識装置
出願人
日立Astemo株式会社
代理人
弁理士法人開知
主分類
G06T
7/00 20170101AFI20250228BHJP(計算;計数)
要約
【課題】撮像部の近傍に位置する物体を確実に認識することが可能な車載外界認識装置を提供する。
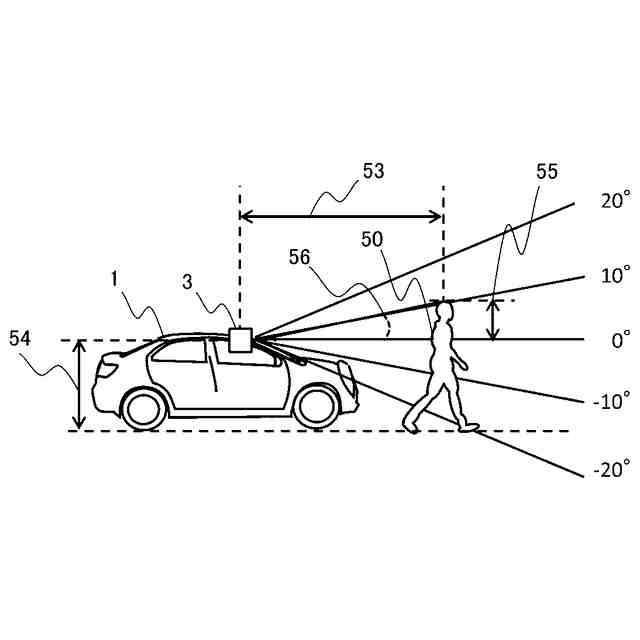
【解決手段】車載外界認識装置は、撮像部および測距部を有する車両に搭載される。車載外界認識装置の演算装置は、測距部による測距結果を用いて物体を検知し、物体の検知結果を用いて、撮像部により撮像された画像に対してモデル推定処理を行う探索範囲を設定し、所定の記憶部に記憶された物体の種別を特定するための種別特定情報を用いて、物体の接地点よりも高い第一の高さから第二の高さまでの範囲が撮像された画像から、探索範囲における物体のモデル推定を行う。
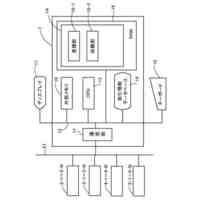
【選択図】図3
特許請求の範囲
【請求項1】
撮像部および測距部を有する車両に搭載される、演算装置を備える車載外界認識装置であって、
前記演算装置は、
前記測距部による測距結果を用いて物体を検知し、
前記物体の検知結果を用いて、前記撮像部により撮像された画像に対してモデル推定処理を行う探索範囲を設定し、
所定の記憶部に記憶された前記物体の種別を特定するための種別特定情報を用いて、前記物体の接地点よりも高い第一の高さから第二の高さまでの範囲が撮像された画像から、前記探索範囲における前記物体のモデル推定を行う、
車載外界認識装置。
続きを表示(約 540 文字)
【請求項2】
請求項1に記載の車載外界認識装置において、
前記演算装置は、前記物体の種別を識別する識別モデルを用いる車載外界認識装置。
【請求項3】
請求項1に記載の車載外界認識装置において、
前記演算装置は、前記物体の位置情報の回帰推定を行う回帰モデルを用いる車載外界認識装置。
【請求項4】
請求項1に記載の車載外界認識装置において、
前記演算装置は、前記物体の高さ別のクラスの識別を行う識別モデルを用いる車載外界認識装置。
【請求項5】
請求項1に記載の車載外界認識装置において、
前記演算装置は、前記モデル推定で定義する前記物体の上端の高さに応じて第一の高さを設定する車載外界認識装置。
【請求項6】
請求項1に記載の車載外界認識装置において、
前記演算装置は、近傍にある物体の車両のボンネットにより遮蔽されず画像に写る下端の高さに応じて第二の高さを設定する車載外界認識装置。
【請求項7】
請求項1に記載の車載外界認識装置において、
前記演算装置は、検知された物体の画像と当該画像に対応する距離情報とを記憶する車載外界認識装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車載外界認識装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
カメラが撮像した画像から物体を認識する際、カメラ以外のセンサを利用して対象物の認識を補助する装置が存在する。例えば特許文献1には、撮像画像とレーザーレーダーによる測距結果とを用いて路面領域を特定する画像処理装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2015-143979号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の画像処理装置は、例えばカメラの視野外に物体の一部が逸脱したり、物体の一部が遮蔽物で遮蔽されたりして、カメラの近傍に位置する物体を認識できない場合がある。
【0005】
本発明は、撮像部の近傍に位置する物体も認識可能な車載外界認識装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様による車載外界認識装置は、撮像部および測距部を有する車両に搭載される、演算装置を備える車載外界認識装置であって、前記演算装置は、前記測距部による測距結果を用いて物体を検知し、前記物体の検知結果を用いて、前記撮像部により撮像された画像に対してモデル推定処理を行う探索範囲を設定し、所定の記憶部に記憶された前記物体の種別を特定するための種別特定情報を用いて、前記物体の接地点よりも高い第一の高さから第二の高さまでの範囲が撮像された画像から、前記探索範囲における前記物体のモデル推定を行う。
【発明の効果】
【0007】
本発明によれば、撮像部の近傍に位置する物体を確実に認識することができる。
【図面の簡単な説明】
【0008】
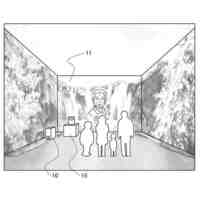
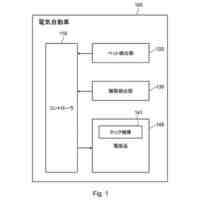
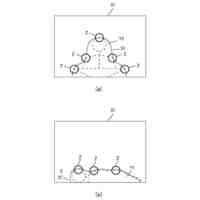
図1は、第1実施形態に係る外界認識装置を搭載する車両の模式図である。
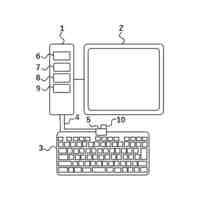
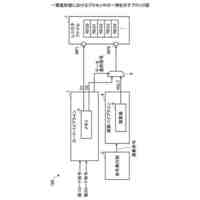
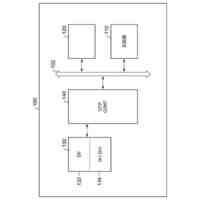
図2は、第1実施形態に係る外界認識装置のハードウェア構成を模式的に示すブロック図である。
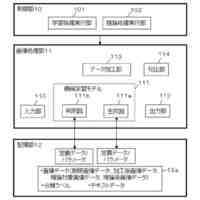
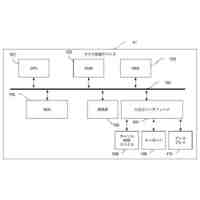
図3は、第1実施形態に係る外界認識装置の機能構成を模式的に示すブロック図である。
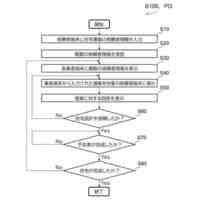
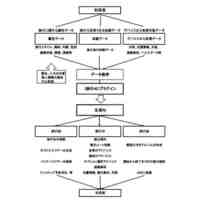
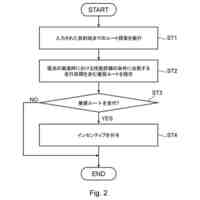
図4は、第1実施形態に係る外界認識装置による外界認識処理のフローチャートである。
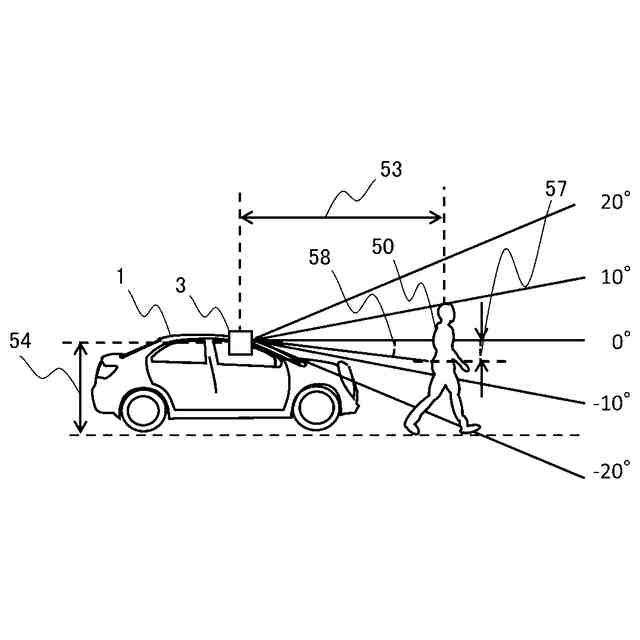
図5は、垂直画角の特定方法を説明する説明図である。
図6は、探索範囲の上端の高さに対応する垂直画角を示す説明図である。
図7は、探索範囲の下端の高さに対応する垂直画角を示す説明図である。
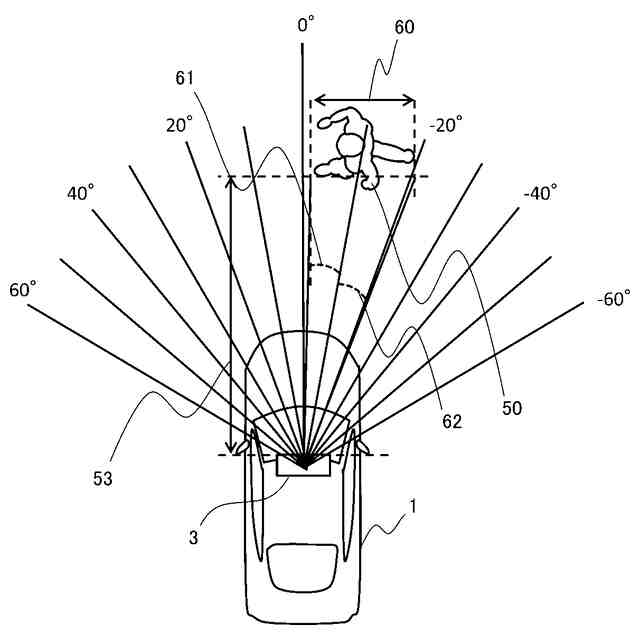
図8は、水平画角の特定方法を説明する説明図である。
図9は、補正済み画像における探索範囲の設定方法の説明図である。
図10は、二値の識別器によるモデル推定を行う場合のモデルの構成例を示す説明図である。
図11は、回帰推定を行う場合のモデルの構成例を示す説明図である。
図12は、身長別に異なるクラスにモデル定義を行う、複数値の識別問題を解くモデルの構成例を示す説明図である。
図13は、探索範囲設定部がモデル辞書更新用の学習データとして記憶する情報を例示する説明図である。
図14は、第2実施形態に係る外界認識装置を搭載する車両の模式図である。
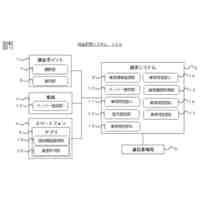
図15は、第2実施形態に係る外界認識装置の機能構成を模式的に示すブロック図である。
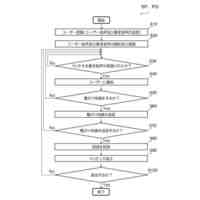
図16は、第2実施形態に係る外界認識装置による外界認識処理のフローチャートである。
【発明を実施するための形態】
【0009】
<第1実施形態>
図1~図13を参照して、本発明の第1実施形態に係る車載外界認識装置について説明する。なお、以下の説明において、車載外界認識装置を外界認識装置と簡略化して呼ぶことがある。
【0010】
図1は、第1実施形態に係る外界認識装置を搭載する車両の模式図である。第1実施形態に係る外界認識装置は、車両1に搭載され、車両1の外界を認識する装置である。以下の説明では、車両1を自車両と呼ぶことがある。車両1は、外界認識装置に加えて、測距装置2a、測距装置2b、および撮像装置3を搭載する。以下の説明において、測距装置2aおよび測距装置2bを測距装置2と総称する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
プログラム
6日前
個人
情報提示方法
1か月前
株式会社理研
演算装置
13日前
個人
プログラム
1か月前
個人
プログラム
1か月前
個人
アカウントマップ
1か月前
個人
日本語入力支援システム
13日前
個人
AI旅行最適化プラグイン
12日前
個人
学習装置及び推論装置
1か月前
個人
案件管理装置および端末装置
27日前
個人
納骨堂システム
5日前
個人
技術実行管理システム
今日
富士通株式会社
金融システム
1か月前
株式会社発明屋
電池指向の構造設計
1か月前
キヤノン株式会社
情報処理装置
13日前
トヨタ自動車株式会社
管理装置
1か月前
個人
ダブルオークションシステム
23日前
株式会社プレニーズ
仲介システム
1か月前
トヨタ自動車株式会社
電気自動車
19日前
富士通株式会社
プロセッサ
1か月前
株式会社イズミ
総合代行システム
23日前
富士通株式会社
予測
26日前
合同会社IPマネジメント
料金収受システム
26日前
株式会社SUBARU
車両用操作装置
19日前
ローム株式会社
半導体集積回路
9日前
株式会社TIMEWELL
情報処理システム
6日前
個人
株式投資コンペティションシステム
26日前
個人
生成AI向けデータ保管及び活用システム
6日前
個人
収納装置および収納システム
12日前
株式会社サマデイ
メンタリングシステム
今日
西日本電信電話株式会社
分析装置
26日前
株式会社アジラ
行動体存在推定システム
1か月前
キヤノン株式会社
ワークフロー制御装置
5日前
トヨタ自動車株式会社
電池評価システム
5日前
トヨタ自動車株式会社
電池性能推定方法
26日前
マクセル株式会社
リーダライタ用ホルダ
26日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ