TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025027561
公報種別
公開特許公報(A)
公開日
2025-02-28
出願番号
2023132406
出願日
2023-08-16
発明の名称
自律移動体の機能拡張装置、自律移動システム及び自律移動方法
出願人
株式会社日立システムズ
代理人
弁理士法人第一国際特許事務所
主分類
G05D
1/43 20240101AFI20250220BHJP(制御;調整)
要約
【課題】本発明では、自律移動の機械学習モデルの修正を行わずに、自律移動の機能を拡張する技術を提供することを目的とする。
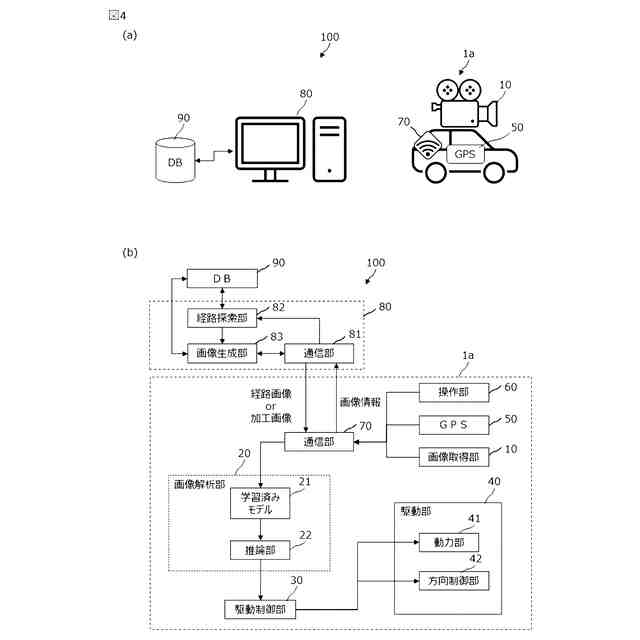
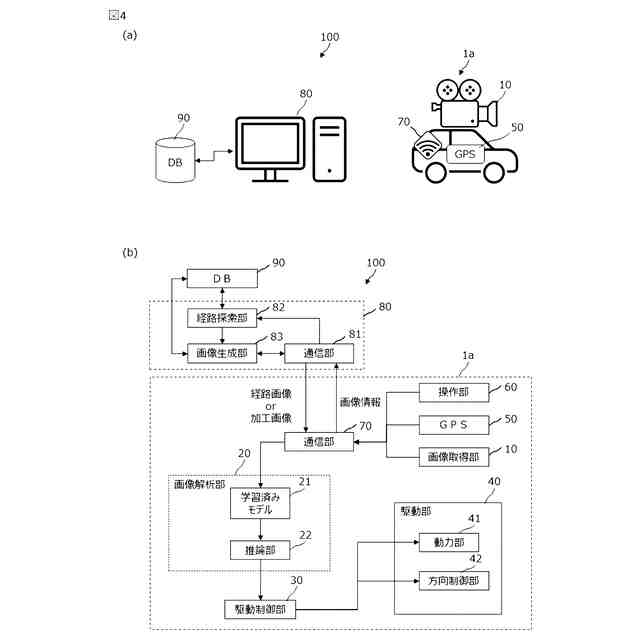
【解決手段】本発明の自律移動体の機能拡張装置の一つは、画像取得部を有し、取得された画像に基づいて移動経路を判断し自律移動を行う自律移動体の機能拡張装置であって、
前記自律移動体の目的地を示す目的地情報及び現在位置を示す現在位置情報、並びに画像取得部によって取得された画像を示す画像情報、を取得する通信部と、前記目的地情報及び現在位置情報に基づいて、移動経路を算出する経路探索部と、前記画像情報に基づいて、前記自律移動体の移動先を示す経路画像を生成する画像生成部と、を備え、前記画像生成部は、前記経路画像において分岐路が検出される場合、前記経路画像を加工した加工画像を生成し、前記自律移動体は、前記加工画像に基づいて移動するものである。
【選択図】図4
特許請求の範囲
【請求項1】
画像取得部を有し、取得された画像に基づいて移動経路を判断し自律移動を行う自律移動体の機能拡張装置であって、
前記自律移動体の目的地を示す目的地情報及び現在位置を示す現在位置情報、並びに画像取得部によって取得された画像を示す画像情報、を取得する通信部と、
前記目的地情報及び現在位置情報に基づいて、移動経路を算出する経路探索部と、
前記画像情報に基づいて、前記自律移動体の移動先を示す経路画像を生成する画像生成部と、を備え、
前記画像生成部は、
前記経路画像において分岐路が検出される場合、前記経路画像を加工した加工画像を生成し、
前記自律移動体は、前記加工画像に基づいて移動する、自律移動体の機能拡張装置。
続きを表示(約 1,100 文字)
【請求項2】
前記画像生成部は、前記分岐路に含まれる少なくとも2つの経路のうち、前記移動経路に含まれない経路を消去するように加工して、前記加工画像を生成する、請求項1に記載の自律移動体の機能拡張装置。
【請求項3】
地図情報が記憶されるデータベースをさらに備え、
前記経路探索部は、前記地図情報、前記目的地情報及び前記現在位置情報に基づいて、前記移動経路を算出する、請求項1に記載の自律移動体の機能拡張装置。
【請求項4】
前記自律移動体は、
前記目的地情報の入力を受け付ける操作部と、
前記現在位置情報を取得する測位部と、
機械学習モデルを用いて前記経路画像に画像解析を行い、走行すべき経路である走行路を抽出する画像解析部と、
前記画像解析の結果に基づいて、走行を制御する駆動制御部と、を備える、請求項1に記載の機能拡張装置。
【請求項5】
自律移動システムであって、
画像取得部を有し、取得された画像に基づいて移動経路を判断し自律移動を行う自律移動体と、
前記自律移動体の目的地を示す目的地情報及び現在位置を示す現在位置情報、並びに画像取得部によって取得された画像を示す画像情報、を取得する通信部と、
前記目的地情報及び現在位置情報に基づいて、移動経路を算出する経路探索部と、
前記画像情報に基づいて、前記自律移動体の移動先を示す経路画像を生成する画像生成部と、を含み、
前記画像生成部は、
前記経路画像に分岐路が検出される場合、前記経路画像を加工した加工画像を生成し、
前記自律移動体は、前記加工画像に基づいて移動する、自律移動システム。
【請求項6】
画像取得部を有し、取得された画像に基づいて移動経路を判断し自律移動を行う自律移動体の自律移動方法であって、
前記自律移動体の目的地を示す目的地情報及び現在位置を示す現在位置情報、並びに画像取得部によって取得された画像を示す画像情報、を取得する通信ステップと、
前記目的地情報及び現在位置情報に基づいて、移動経路を算出する経路探索ステップと、
前記画像情報に基づいて、前記自律移動体の移動先を示す経路画像を生成する画像生成ステップと、を含み、
前記画像生成ステップにおいて、
前記経路画像に分岐路が検出される場合、前記経路画像を加工した加工画像を生成し、
前記自律移動体は、前記加工画像に基づいて移動する、自律移動方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律移動体の機能拡張装置、自律移動システム及び自律移動方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来から、撮像画像に基づいて自律的に走行を行う移動体に関する技術が実用化されている。また、交差点のように走行路が複数撮像された場合に、運転者の操作を支援するためのカメラシステムに関する技術も知られている。
【0003】
前者の技術の一例として、特許文献1は、無人走行台車を開示している。特許文献1における無人走行台車は、走行エリア内の搬送ルートを走行する無人走行台車1であって、搬送ルートの左右両側の床面のガイドライン及び標識を撮像する撮像手段10と、前方の障害物を検知する測域センサ11と、撮像された画像からガイドラインの位置を識別するライン識別手段12と、画像を用いた標識識別手段13と、ガイドラインの位置に合せて操舵すると共に標識の種類に合わせて操舵方向と走行速度を制御する走行制御手段14と、検知した障害物が目的地上にない場合に搬送ルートを外れて障害物を回避した後に元のルートに復帰させ、目的地に停止する場合に障害物がなくなるまで停止させる障害物回避制御手段15とを備える。
【0004】
また後者の技術の一例として、特許文献2は、車載カメラシステムを開示している。特許文献2の車載カメラシステムにおいて、車両が十字路の交差点52に進入するとき、フロントカメラ20Aが撮影する全方位の映像のうちの左方向から進入する車両を確認することができる映像の範囲53と、右方向から進入する車両を確認することができる映像切出範囲54とが算出される。そして、フロントカメラ20Aが撮影する全方位の映像のうちの映像切出範囲53の映像61と映像切出範囲54の映像62とが2画面表示で表示モニタに表示される。
【先行技術文献】
【特許文献】
【0005】
特開2022-042165号公報
特開2009-067292号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1の技術は、基本的に移動経路が定められており、分岐の無い道を走行することが前提とされているAI(機械学習)学習モデルを用いた自律型の移動システムである。このため、前提の条件によって制限されるとおり、分岐路のある道には対応させることが困難である。
一方、特許文献2の技術では交差点の左方向と右方向の状況を把握することが可能となるが、ドライバの運転操作を支援することを目的としており、自動運転への活用については改善の余地を残している。
【0007】
そこで、本発明では、自律移動の機械学習モデルの修正を行わずに、自律移動の機能を拡張する技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、代表的な本発明の自律移動体の機能拡張装置の一つは、画像取得部を有し、取得された画像に基づいて移動経路を判断し自律移動を行う自律移動体の機能拡張装置であって、前記自律移動体の目的地を示す目的地情報及び現在位置を示す現在位置情報、並びに画像取得部によって取得された画像を示す画像情報、を取得する通信部と、前記目的地情報及び現在位置情報に基づいて、移動経路を算出する経路探索部と、前記画像情報に基づいて、前記自律移動体の移動先を示す経路画像を生成する画像生成部と、を備え、前記画像生成部は、前記経路画像において分岐路が検出される場合、前記経路画像を加工した加工画像を生成し、前記自律移動体は、前記加工画像に基づいて移動するものである。
【発明の効果】
【0009】
本発明によれば、自律移動の機械学習モデルの修正を行わずに、自律移動の機能を拡張することができる。
上記した以外の課題、構成および効果は、以下の発明を実施するための形態における説明により明らかにされる。
【図面の簡単な説明】
【0010】
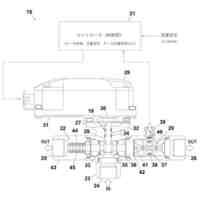
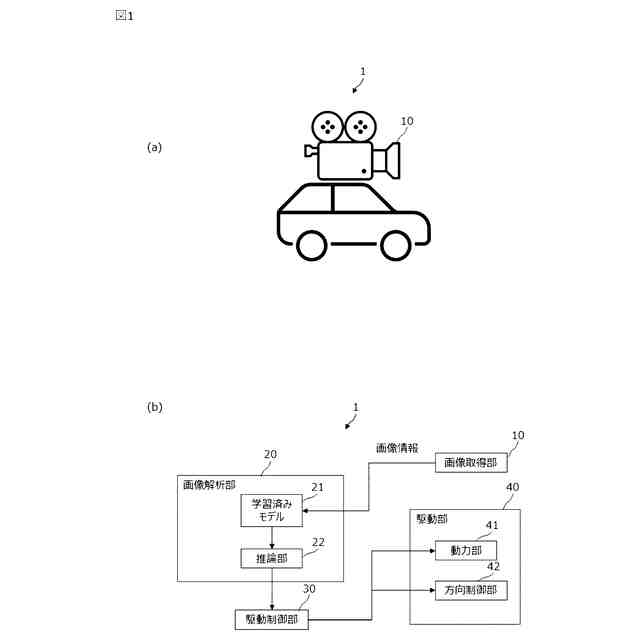
図1は、自律移動体の構成の一例を示す図である。
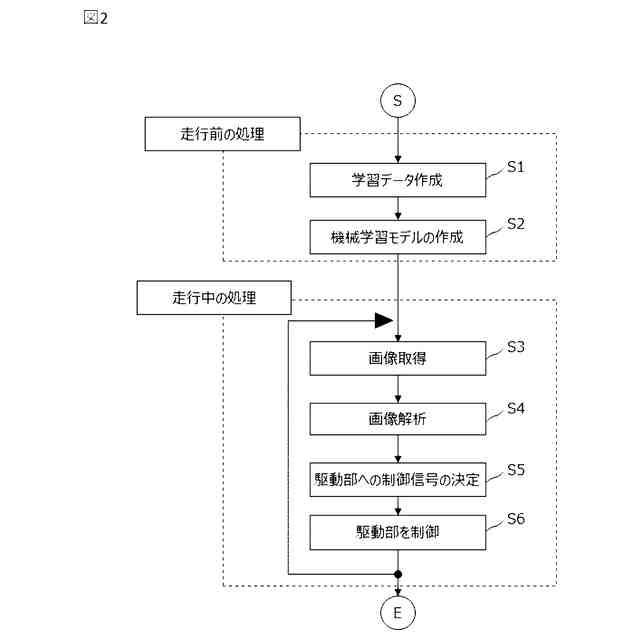
図2は、自律移動体において行われる処理のフローチャートを示す図である。
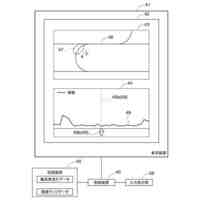
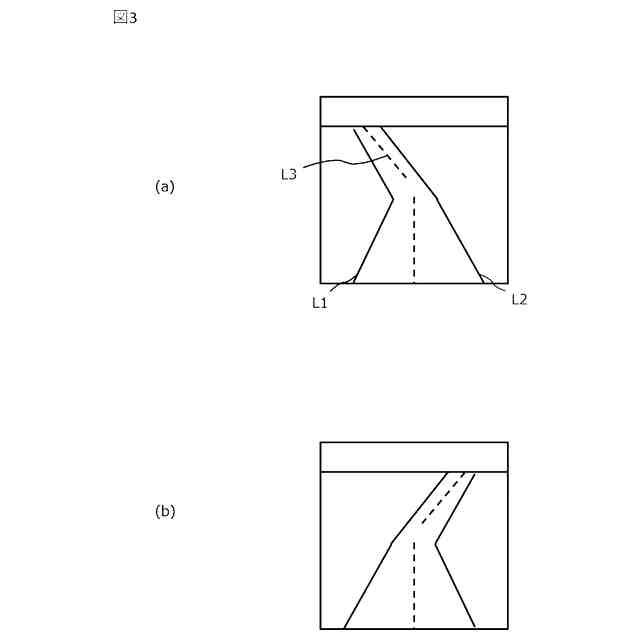
図3は、画像取得部によって取得される画像の一例を示す図である。
図4は、自律移動体に機能拡張装置を適用した構成の一例を示す図である。
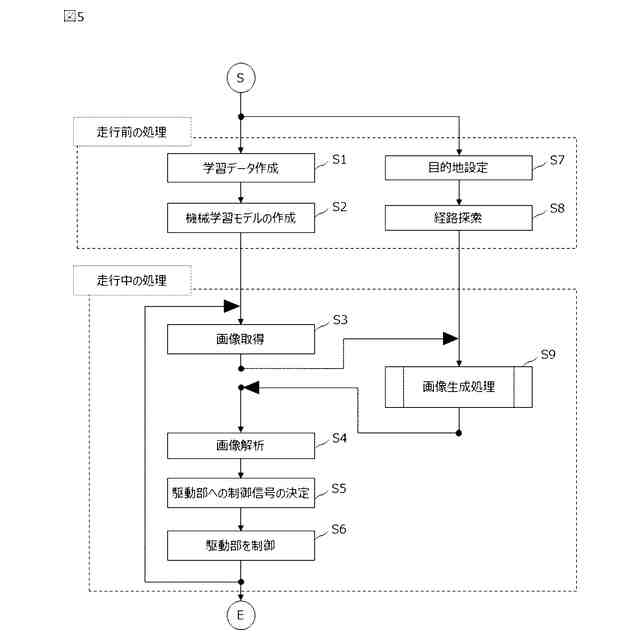
図5は、自律移動システムにおいて行われる処理のフローチャートを示す図である。
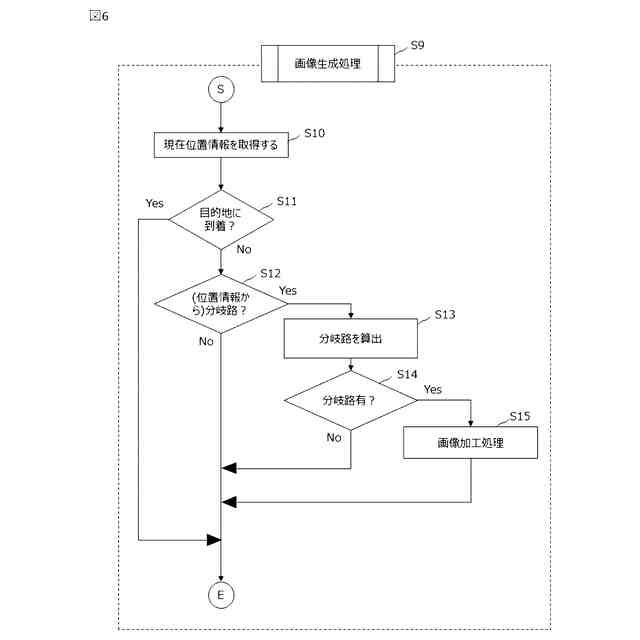
図6は、自律移動システムのフローチャートのうち、画像生成処理のフローチャートを示す図である。
図7は、画像生成部によって生成される加工画像の一例を示す図である。
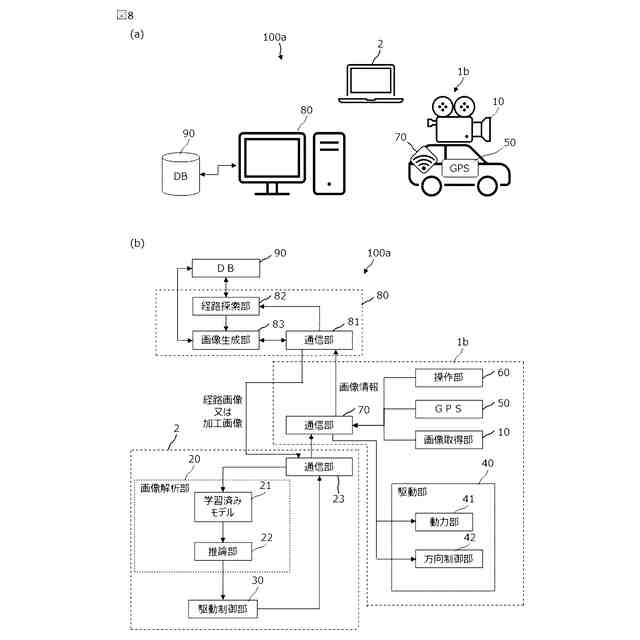
図8は、自律移動体に機能拡張装置を適用した構成の一例を示す図である。
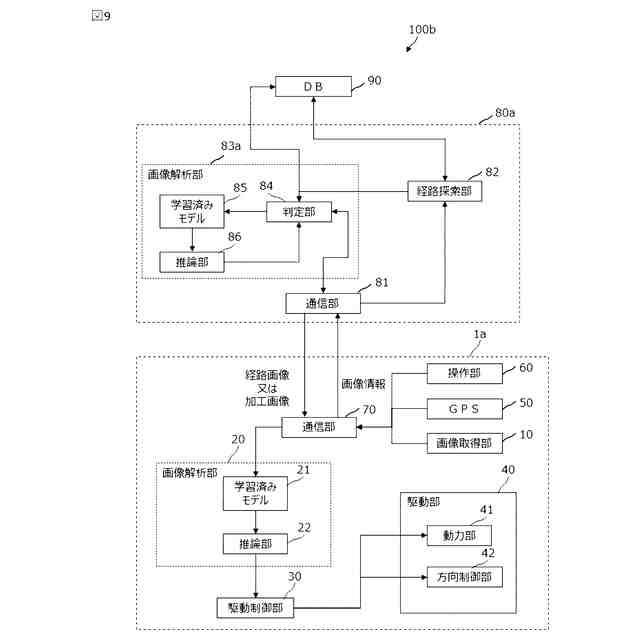
図9は、自律移動体に機能拡張装置を適用した構成の一例を機能ブロックとして示す図である。
図10は、サーバーの画像解析部において行われる学習段階の処理のフローチャートを示す図である。
図11は、画像生成の処理のフローチャートを示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
1か月前
アズビル株式会社
制御装置
24日前
村田機械株式会社
産業機械
1か月前
トヨタ自動車株式会社
自律移動体
1か月前
コフロック株式会社
流量制御装置
25日前
株式会社丸和製作所
入力機器
24日前
株式会社クボタ
作業車
1か月前
株式会社明電舎
車両
1か月前
アズビル株式会社
パラメータ調整装置
1か月前
株式会社豊田自動織機
荷役車両
17日前
株式会社フジキン
流量制御装置
24日前
株式会社村田製作所
温度補償回路
1か月前
株式会社シンテックホズミ
搬送ロボット
6日前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
キヤノン株式会社
情報処理装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
10日前
旭精機工業株式会社
監視データ処理装置
1か月前
東フロコーポレーション株式会社
流量制御装置
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
25日前
ブラザー工業株式会社
数値制御装置及び工作機械
1か月前
株式会社ダイフク
情報表示システム
2か月前
株式会社ディスコ
搬送車
1か月前
ブラザー工業株式会社
調整方法及び数値制御装置
18日前
株式会社FUJI
工作機械
25日前
ローム株式会社
定電圧生成回路
10日前
ローム株式会社
定電圧生成回路
1か月前
ローム株式会社
定電圧生成回路
1か月前
株式会社日立製作所
診断装置および診断方法
2か月前
株式会社マキタ
作業ロボット
1か月前
株式会社シマノ
人力駆動車の操作装置
17日前
富士電機株式会社
制御システム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ