TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025022595
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023127315
出願日
2023-08-03
発明の名称
車両制御装置、車両制御プログラム
出願人
株式会社デンソー
,
株式会社J-QuAD DYNAMICS
代理人
個人
,
個人
,
個人
主分類
B60W
30/16 20200101AFI20250206BHJP(車両一般)
要約
【課題】走行時のエネルギー消費を低減可能なように追従制御を実施可能な車両制御装置を提供する。
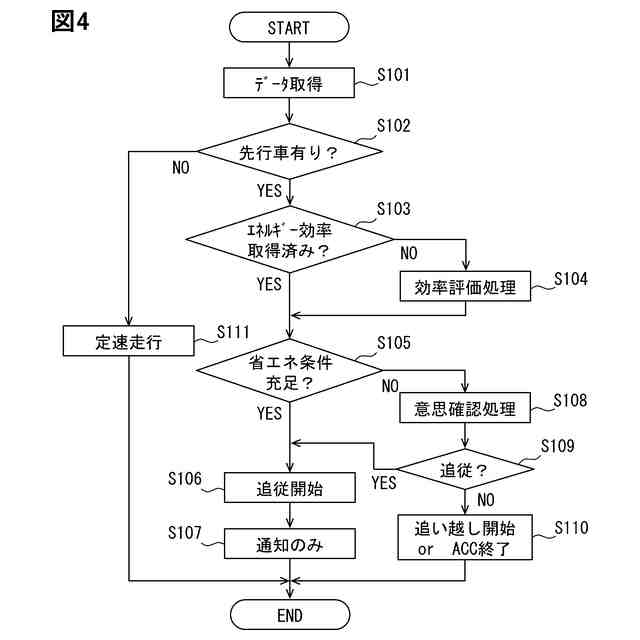
【解決手段】プロセッサ61は、アダプティブクルーズコントロールの定速走行中に先行車を検出すると、当該先行車が高効率車であるか否かを判断する。高効率車は、走行速度の安定度、電費、燃費、エコ運転度といった、走行に伴うエネルギー効率の良し悪しを示す指標が所定の省エネルギー条件を充足する車両である。プロセッサ61は先行車が高効率車である場合には、ドライバへの許可を取ることなく、追従制御を開始する。一方、先行車が高効率車ではない場合には、ドライバに追従するか否かを問い合わせる。
【選択図】図4
特許請求の範囲
【請求項1】
先行車の情報を受信する受信部(64)と、
前記先行車に追従するように自車両を走行させる制御である追従制御を実施可能に構成された制御部(61)と、を備え、
前記制御部は、
前記先行車の前記情報に基づいて、前記先行車が、走行時のエネルギー効率に関する所定の省エネルギー条件を満たすか否か判断し、
前記先行車が前記省エネルギー条件を満たすと判断した場合に前記追従制御を行うように構成されている車両制御装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の車両制御装置であって、
前記制御部は、
前記先行車が前記省エネルギー条件を満たす場合には、ドライバの意思を問い合わせることなく、自動的に前記追従制御を開始する一方、
前記先行車が前記省エネルギー条件を満たさない場合には、車線変更を実施するか、又は、前記追従制御を実施するか否かを前記ドライバに問い合わせる処理を実施する車両制御装置。
【請求項3】
請求項1に記載の車両制御装置であって、
前記制御部は、前記先行車が前記省エネルギー条件を満たさない場合、通知装置を用いて、前記追従制御を行うことを推奨しない情報をドライバに通知するための処理を実行するように構成されている車両制御装置。
【請求項4】
請求項1に記載の車両制御装置であって、
前記制御部は、前記先行車が前記省エネルギー条件を満たす場合、通知装置を用いて、前記追従制御を行うことを推奨する情報をドライバに通知するための処理を実行するように構成されている車両制御装置。
【請求項5】
請求項1に記載の車両制御装置であって、
前記受信部は、入力装置を介して、ドライバが前記追従制御を許容することを示す信号を受信するよう構成されており、
前記制御部は、
前記先行車が前記省エネルギー条件を満たし、かつ、前記追従制御を許容する信号を前記受信部が受信している場合、前記制御部は前記追従制御を行うように構成されている車両制御装置。
【請求項6】
請求項1に記載の車両制御装置であって、
前記省エネルギー条件は、前記先行車の走行にかかるエネルギー消費を抑えるように前記先行車の走行が前記先行車に搭載されている制御装置によって自動制御されている状態であることを含む、車両制御装置。
【請求項7】
請求項1に記載の車両制御装置であって、
前記省エネルギー条件は、前記先行車の現在の走行にかかるエネルギー効率の度合いを示す省エネルギー運転度が所定値以上であることを含む、車両制御装置。
【請求項8】
請求項1に記載の車両制御装置であって、
前記省エネルギー条件は、前記先行車のエネルギー消費履歴に基づく平均エネルギー効率が所定値以上であることを含む、車両制御装置。
【請求項9】
請求項1に記載の車両制御装置であって、
前記省エネルギー条件は、前記先行車の車速が所定の速度範囲内にあることを含む、車両制御装置。
【請求項10】
請求項1に記載の車両制御装置であって、
前記省エネルギー条件は、直近一定時間以内における前記先行車の加速度の最大値が所定範囲に収まっていることを含む、車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、先行車へ追従して走行するか否かを判断可能な車両制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
先行車へ追従して走行するように自車両の速度を自動調整する制御は、アダプティブクルーズコントロール又は先行車追従制御として知られている。特許文献1には、ふらつきの抑制を目的として、先行車の形状に基づいて、先行車追従制御における設定を変更する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-105250号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、先行車追従制御に際し、走行時のエネルギー消費を抑制する方法については検討されていない。仮に減速と加速を頻繁に繰り返す他車両に自車両が追従すると、自車両のエネルギー効率が劣化しうる。
【0005】
本開示は、上記の着眼点に基づいて成されたものであり、その目的の1つは、走行時のエネルギー消費を低減可能なように追従制御を実施可能な車両制御装置を提供することにある。
【課題を解決するための手段】
【0006】
ここに開示される車両制御装置は、先行車の情報を受信する受信部(64)と、先行車に追従するように自車両を走行させる制御である追従制御を実施可能に構成された制御部(61)と、を備え、制御部は、先行車の情報に基づいて、先行車が、走行時のエネルギー効率に関する所定の省エネルギー条件を満たすか否か判断し、先行車が省エネルギー条件を満たすと判断した場合に追従制御を行うように構成されている。
【0007】
また、ここに開示される車両制御プログラムは、コンピュータに、先行車の情報を取得することと、先行車の情報に基づいて先行車が走行時のエネルギー効率に関する所定の省エネルギー条件を満たすか否か判断することと、先行車が省エネルギー条件を満たす場合に、先行車に追従するように自車両を走行させる制御である追従制御を行うことと、を実行させるための命令を含む。
【0008】
上記の装置/プログラムによれば、自車両は、先行車が省エネルギー条件を充足する場合に、追従制御を行うように作動する。よって、減速と加速を頻繁に繰り返すなど、エネルギー効率が悪い他車両に自車両を追従させるおそれを低減できる。すなわち、走行時のエネルギー消費を低減可能なように追従制御を実施可能となる。
【0009】
なお、特許請求の範囲に記載した括弧内の符号は、一つの態様として後述する実施形態に記載の具体的手段との対応関係を示すものであって、本開示の技術的範囲を限定するものではない。
【図面の簡単な説明】
【0010】
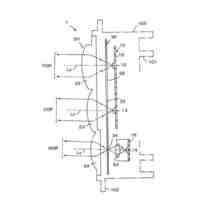
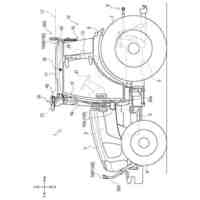
交通システムの全体像を示す図である。
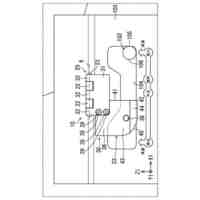
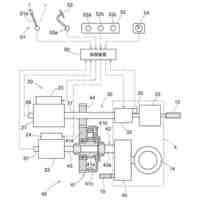
車載システムのブロック図である。
車両制御装置の機能ブロック図である。
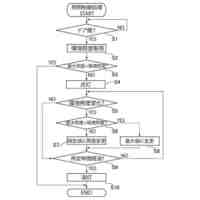
自車両が先行車に追いついた際の車両制御装置の作動例を示すフローチャートである。
先行車への追従を開始する際に表示する画像の一例を示す図である。
手動運転中における車両制御装置の作動例を示すフローチャートである。
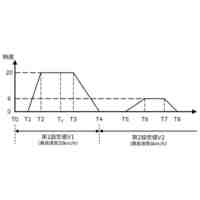
設定車速に応じて先行車に追従するか否かを変更する処理のフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
3日前
個人
授乳用車両
1か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
表示装置
20日前
マツダ株式会社
車両
27日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用照明装置
7日前
株式会社小糸製作所
投影装置
1か月前
関西広域輸送協同組合
制限装置
21日前
株式会社SUBARU
保護構造
27日前
豊田合成株式会社
乗員保護装置
21日前
株式会社クボタ
作業車両
6日前
バルミューダ株式会社
電動車両
7日前
株式会社クボタ
作業車両
6日前
株式会社SUBARU
保護構造
21日前
豊田合成株式会社
乗員保護装置
15日前
株式会社諸岡
昇降用ステップ装置
1か月前
株式会社小糸製作所
画像照射装置
21日前
スズキ株式会社
車両のリッド構造
14日前
株式会社SUBARU
車両前部構造
20日前
株式会社クボタ
作業車
27日前
株式会社ニフコ
乗物用テーブル装置
15日前
株式会社SUBARU
車両前部構造
21日前
株式会社ニフコ
乗物用テーブル装置
15日前
株式会社クボタ
作業車
27日前
株式会社SUBARU
車両前部構造
21日前
株式会社クボタ
作業車
27日前
株式会社ナンシン
旋回キャスタ構造
1か月前
株式会社クボタ
作業車
28日前
株式会社クボタ
作業車
1か月前
株式会社カーメイト
キャリア
14日前
株式会社クボタ
作業車
1か月前
日本車輌製造株式会社
タンク搭載車両
1か月前
豊田合成株式会社
車両用外装品
1か月前
株式会社アイシン
ドア支持装置
21日前
トヨタ自動車株式会社
電動車両
28日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ