TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025016468
公報種別
公開特許公報(A)
公開日
2025-02-04
出願番号
2024173303,2022554725
出願日
2024-10-02,2021-03-05
発明の名称
船体洗浄ロボット
出願人
ヨツン アクティーゼルスカブ
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B63B
59/06 20060101AFI20250128BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】船体洗浄ロボットを提供する。
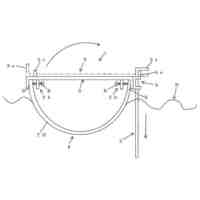
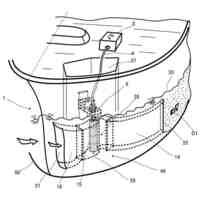
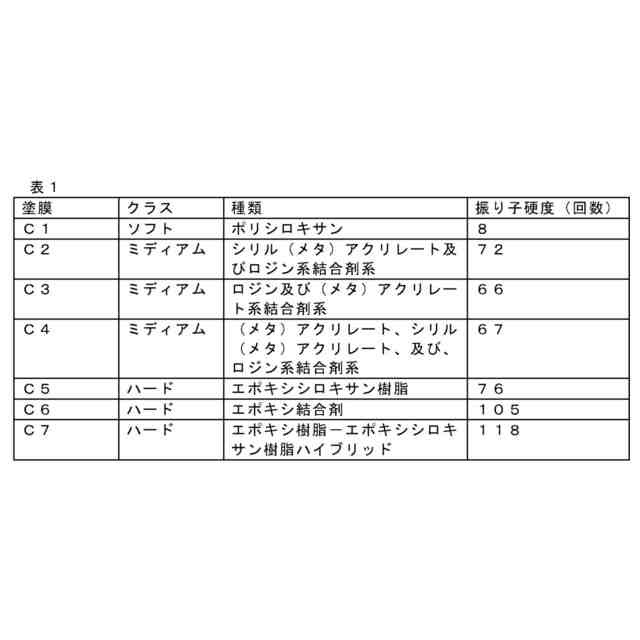
【解決手段】一実施形態では、75回数未満のケーニッヒ振り子硬度を有する塗膜の面を洗浄するように構成されたロボットが開示される。ロボットは、ブラシ芯から外側に延びると共に、高さを有する複数のラメラを有するラメラ洗浄ブラシを備える洗浄ブラシアセンブリを備え、ラメラ洗浄ブラシは、面と接触すると面に洗浄動作を施すためにその軸を中心に回転するように配置され、ブラシが塗膜の面に接触するがその事によって変形していない初期位置から、塗膜の面に向かって距離をとって据えた位置にブラシが保持され、この距離は複数のラメラの高さの56%未満であるように、ロボットは面に洗浄ブラシの圧縮度を加えるように構成される。
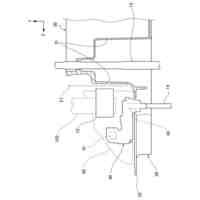
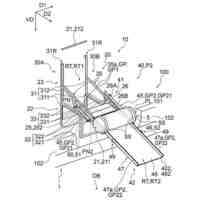
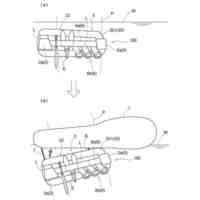
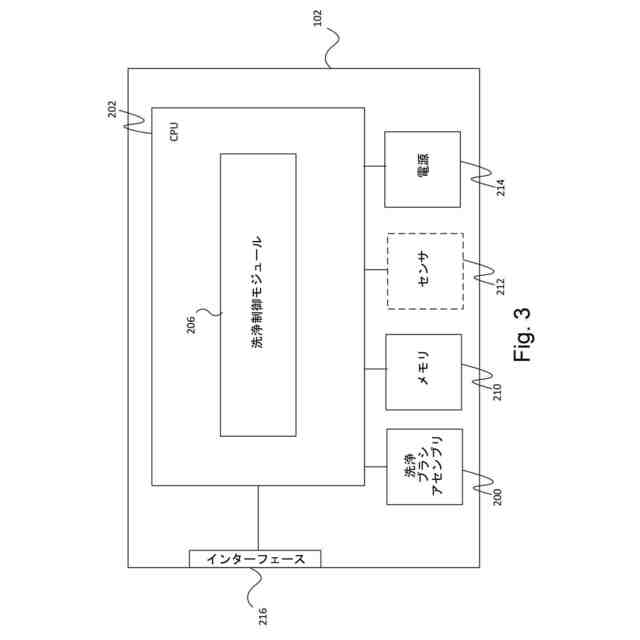
【選択図】図3
特許請求の範囲
【請求項1】
船の船体に塗布された塗膜の面を、前記船体上を走行しながら洗浄するように構成されたロボットであって、前記塗膜は75回数未満のケーニッヒ振り子硬度を有し、前記ロボットは、
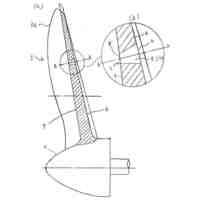
ラメラ洗浄ブラシを備える洗浄ブラシアセンブリを備え、前記ラメラ洗浄ブラシは、ブラシ芯から外側に延び、高さを有する複数のラメラを備え、前記ラメラ洗浄ブラシは、前記面に接触すると前記面に洗浄動作を施すためにその軸を中心に回転するように配置され、
前記ラメラ洗浄ブラシが前記塗膜の前記面に接触するがその事によって変形していない初期位置から前記塗膜の前記面に向かって距離をとって据えた位置に前記ラメラ洗浄ブラシが保持されるように、前記ロボットは前記面に前記ラメラ洗浄ブラシの圧縮度を加えるように構成され、前記距離は前記複数のラメラの前記高さの56%未満である、ロボット。
続きを表示(約 1,100 文字)
【請求項2】
前記距離は、前記複数のラメラの前記高さの5~56%であり、より好ましくは前記複数のラメラの前記高さの5~28%であり、さらに好ましくは前記複数のラメラの前記高さの11~22%である、請求項1に記載のロボット。
【請求項3】
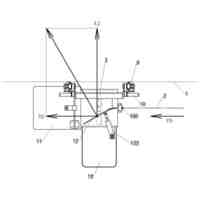
プロセッサは、前記ロボットが前記船体の領域上を走行することで前記洗浄動作中に各ラメラが多数のブラシストロークを前記領域に施すように、前記ロボットを制御するよう構成され、前記領域は、5mmの幅と前記ラメラ洗浄ブラシの長さに対応する長さとを有する、請求項1又は請求項2に記載のロボット。
【請求項4】
ブラシストロークの数は5000回未満、好ましくは5~3400回、より好ましくは5~1280回、さらに好ましくは6~855回である、請求項3に記載のロボット。
【請求項5】
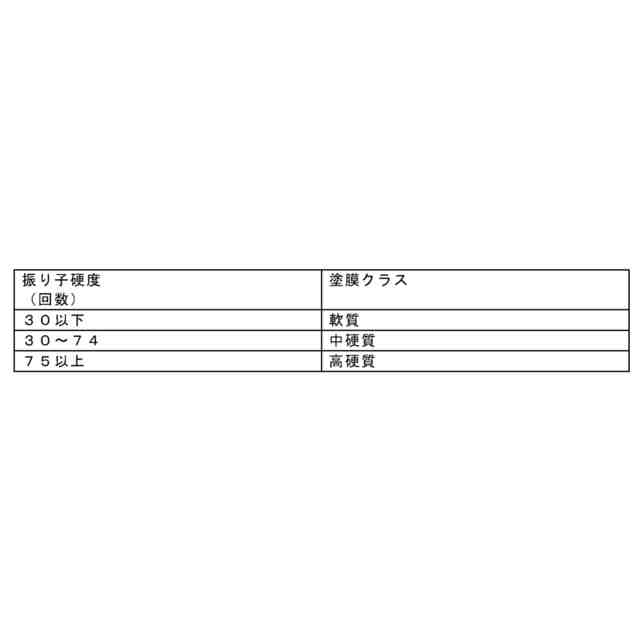
前記塗膜は振り子硬度が30回数未満であり、前記ブラシストロークの数は855回未満である、請求項3に記載のロボット。
【請求項6】
前記塗膜は振り子硬度が30回数未満である、請求項1から請求項4の何れか1項に記載のロボット。
【請求項7】
前記塗膜は振り子硬度が30~74回数である、請求項1から請求項4の何れか1項に記載のロボット。
【請求項8】
前記塗膜は防汚剤を含む、請求項1から請求項7の何れか1項に記載のロボット。
【請求項9】
船の船体に塗布された塗膜の面を、前記船体上を走行しながら洗浄するように構成されたロボットであって、前記塗膜は30~74回数のケーニッヒ振り子硬度を有し、前記ロボットは
洗浄ブラシを備える洗浄ブラシアセンブリを備え、前記洗浄ブラシは前記面に接触すると前記面に洗浄動作を施すためにその軸を中心に回転するように配置され、前記洗浄ブラシは、ブリストル長を有するブリストルを備え、前記ブリストルは1mm以下のブリストル径を有し、
前記洗浄ブラシが前記塗膜の前記面に接触するがそれによって変形していない初期位置から前記塗膜の前記面に向かって距離をとって据えた位置に前記洗浄ブラシが保持されるように、前記ロボットは前記面に前記洗浄ブラシの圧縮度を加えるように構成され、前記距離は前記ブリストルの前記ブリストル長の20%未満である、ロボット。
【請求項10】
前記距離は、前記ブリストルの前記ブリストル長の2~16%であり、より好ましくは前記ブリストルの前記ブリストル長の2~12%である、請求項9に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、船の船体上を走行しながら船体を洗浄するように構成されたロボット、船の船体洗浄用キット、及び、船の船体に塗布された塗膜の面を洗浄する方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
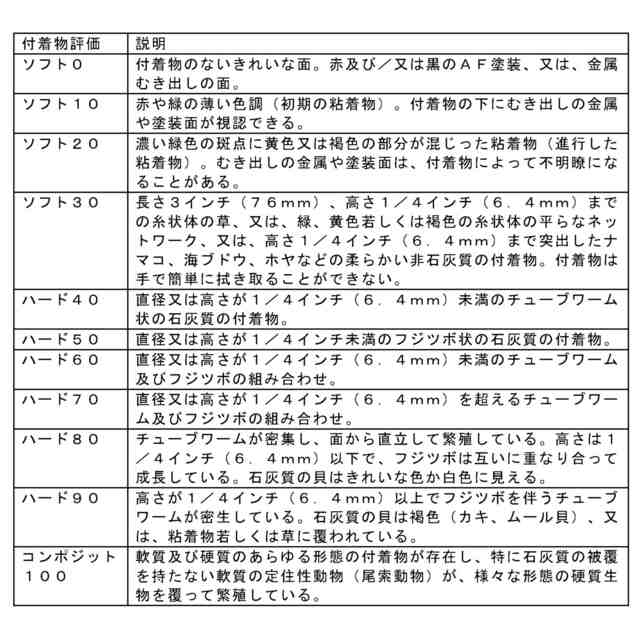
海水に浸かっている全ての面には、細菌、珪藻、藻類、ムール貝、チューブワーム、フジツボなどの有機体の付着が発生する。海洋付着物は、海水に浸かっている構造物への微生物、藻類、動物の望ましくない蓄積である。付着生物は、マイクロファウリング(細菌及び2原子分子のバイオフィルム)とマクロファウリング(例えば、大型藻類、フジツボ、ムール貝、チューブワーム、コケムシ)とに分類することができ、これらは付着物コミュニティを形成しながら共に生息する。付着工程の概要を簡単に説明すると、第一段階として、有機分子が面に付着した調整膜が形成される。この現象は、面が海水に浸かった瞬間に発生する。一次コロニー形成者である細菌及び珪藻類は1日以内に沈着する。二次コロニー形成者である大型藻類の胞子や原生生物は1週間以内に沈着する。そして、マクロファウリングの幼生である第三次コロニー形成者が2~3週間以内に沈着する。
【0003】
海洋付着物の発生はよく知られた問題である。活発な貿易を行う船の船体に付着した海洋付着物は抵抗の増加や燃料消費量の増加、あるいは速度の低下につながるであろう。燃料消費量の増加は、CO
2
、NO
x
及び硫黄排出量の増加につながるであろう。多くの商船(例えば、コンテナ船、ばら積み貨物船、タンカー、旅客船)が世界中で貿易をしている。船体に付着した付着生物は、ある地理的地域から別の地域へ移動し得ることが知られている。これが問題となり得るのは、外来種が新しい生態系に侵入し、結果として生態学的又は商業的な影響を及ぼす場合である。
【0004】
従来から、海洋生物の沈着や繁殖を防ぐために防汚塗料が使用されてきた。最も効率的な防汚塗料には、塗膜から漏れ出して付着量を減少させる殺生物剤が含まれる。
【0005】
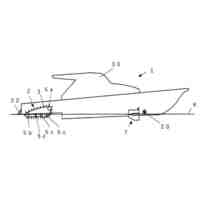
また、従来から、「クローラ」又はROV(遠隔操作ビークル)と呼ばれることがあるロボットも、水中に浸かっている面の洗浄のために、例えば船の船体上に使用するために用いられている。背景技術は、米国特許第8506719号明細書を確認されたい。
【発明の概要】
【0006】
発明者らは、水中に浸かっている面の洗浄には従来からロボットが使用されてきたものの、洗浄装置は、付着物の除去を最適化し、且つ、船体に塗布された塗膜を損傷しないように調整/設置されていないことを特定した。過剰な洗浄動作は、分解性塗膜の過剰消費を招き、殺生物剤を含む塗膜成分の環境への過剰放出につながり、これはまた塗膜の寿命を短くする結果になる。環境への殺生物剤の放出は最小限に留めるべきであるので、これは不都合なことである。また、過剰な洗浄動作は、塗膜に損傷を与え、塗膜の寿命を縮めることになる。過剰な洗浄動作は、あらゆる塗膜を損傷させる可能性がある。塗装面の損傷もまた抵抗を増加させ、燃料消費量を増加させ、あるいは、船の速度を低下させるであろう。
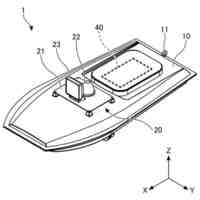
【0007】
本開示の実施形態は、船の船体の予防的洗浄を実行するように構成されたロボットに関するものである。これは、付着工程の初期段階で付着物を除去する方がより容易であり、船の燃料消費を最小限に抑えることを保証するために有益である。予防的洗浄は、付着物を除去するのに充分な研磨力を保ちながら、塗膜の完全性に影響を与えないような穏やかで頻繁な船体の洗浄である。洗浄力のための充分な研磨性と、塗膜面への穏やかな接触のこのバランスは、異なる塗膜系に対して調節されなければならない。
【0008】
本開示の一態様によれば、船の船体に塗布された塗膜の面を、前記船体上を走行しながら洗浄するように構成されたロボットであって、前記塗膜は75回数未満のケーニッヒ振り子硬度を有し、前記ロボットは、ラメラ洗浄ブラシを備える洗浄ブラシアセンブリを備え、前記ラメラ洗浄ブラシは、ブラシ芯から外側に延び、高さを有する複数のラメラを備え、前記ラメラ洗浄ブラシは、前記面に接触すると前記面に洗浄動作を施すためにその軸を中心に回転するように配置され、前記ラメラ洗浄ブラシが前記塗膜の前記面に接触するがそれによって変形していない初期位置から前記塗膜の前記面に向かって距離をとって据えた位置に前記ラメラ洗浄ブラシが保持されるように、前記ロボットは前記面に前記ラメラ洗浄ブラシの圧縮度を加えるように構成され、前記距離は前記複数のラメラの前記高さの56%未満である、ロボットが提供される。
【0009】
前記距離は、前記複数のラメラの前記高さの5~56%であってもよく、より好ましくは前記複数のラメラの前記高さの5~28%であり、さらに好ましくは前記複数のラメラの前記高さの11~22%である。
【0010】
プロセッサは、前記ロボットが前記船体の領域上を走行することで前記洗浄動作中に各ラメラが多数のブラシストロークを前記領域に加えるように前記ロボットを制御するよう構成されてもよく、前記領域は、5mmの幅と前記ラメラ洗浄ブラシの長さに対応する長さを有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
川下り用船
2か月前
個人
シーアンカー
5か月前
個人
発電船
3か月前
個人
船用横揺防止具
3日前
個人
船舶用プロペラ
11か月前
個人
流体抵抗低減省エネ船
10か月前
小柳建設株式会社
台船
5か月前
ウラカミ合同会社
曳航ロボット
6か月前
炎重工株式会社
浮標
1か月前
炎重工株式会社
浮標
1か月前
個人
水陸両用移動装置
6か月前
炎重工株式会社
移動体
4か月前
個人
船舶
1か月前
ダイハツ工業株式会社
ジャケット
7か月前
常石造船株式会社
メタノール燃料船
2か月前
ヤマハ発動機株式会社
船外機
1か月前
個人
海洋「いかだ」上の風力発電システム
10か月前
誠加興業股分有限公司
呼吸用マスク
6か月前
トヨタ自動車株式会社
ガンネル治具
8か月前
株式会社テラサン
位置保持システム
4か月前
個人
キャタピラ推進式高速船
9か月前
株式会社神戸タフ興産
船舶の甲板構造
2か月前
川崎汽船株式会社
ドライアイス輸送船
7か月前
藤倉コンポジット株式会社
架台
1か月前
炎重工株式会社
自律航行浮遊体
1か月前
株式会社大林組
水中潜行システム
24日前
ヤマハ発動機株式会社
船外機および船舶
11日前
株式会社 ASC
航海用低燃費航行方法
11か月前
ヤマハ発動機株式会社
船外機および船舶
17日前
個人
搬送器材
10か月前
サームトロン株式会社
外付けスラスタ装置
11か月前
ASTI株式会社
操作機構取付構造
3か月前
高階救命器具株式会社
救命具
8か月前
株式会社小野田産業
シェルタ
8か月前
個人
競艇用ターンブイ
7か月前
日本ソリッド株式会社
バランス機能を付与した船舶
6か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ