TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025016341
公報種別
公開特許公報(A)
公開日
2025-01-31
出願番号
2024063129
出願日
2024-04-10
発明の名称
ロボット減速機の診断装置およびその方法
出願人
ヒュンダイ トランシス インコーポレイテッド
,
Hyundai Transys Inc.
代理人
弁理士法人三枝国際特許事務所
主分類
B25J
19/06 20060101AFI20250124BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】本発明は、ロボット減速機の診断装置およびその方法が開示される。
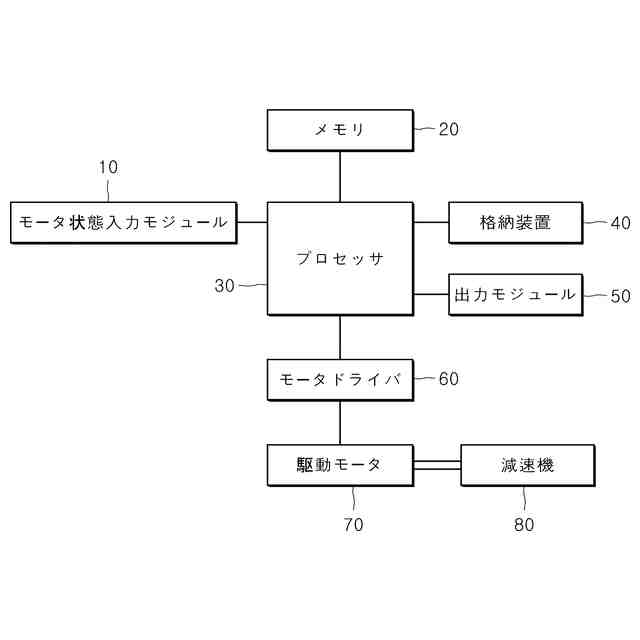
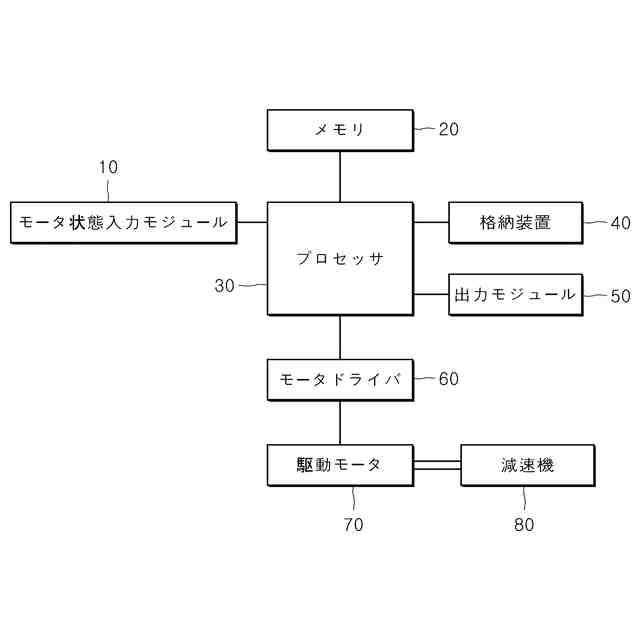
【解決手段】本発明のロボット減速機の診断装置は、減速機に直結した駆動モータの駆動状態が入力されたモータ状態入力モジュールと、格納装置と、実行プログラムが格納されたメモリと、モータ状態入力モジュール、格納装置、およびメモリと作動的に連結(operatively coupled to)されたプロセッサと、を含み、プロセッサは、モータ状態入力モジュールから駆動電流と回転速度とが入力されて、ビッグデータを構築して格納装置に格納し、格納装置に格納された駆動電流と回転速度とに基づいて、減速機を診断するための学習モデルを構築して機械学習を行った後、入力される駆動電流と回転速度とにより、診断学習モデルベースで減速機の異常を診断することを特徴とする。
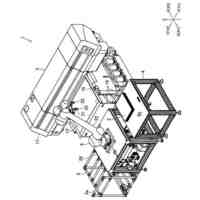
【選択図】図1
特許請求の範囲
【請求項1】
減速機に直結した駆動モータの駆動状態が入力されたモータ状態入力モジュールと、
格納装置と、
実行プログラムが格納されたメモリと、
前記モータ状態入力モジュール、前記格納装置、および前記メモリと作動的に連結(operatively coupled to)されたプロセッサと、を含み、
前記プロセッサは、前記モータ状態入力モジュールから駆動電流と回転速度とが入力されて、ビッグデータを構築して前記格納装置に格納し、前記格納装置に格納された前記駆動電流と前記回転速度とに基づいて、前記減速機を診断するための学習モデルを構築して機械学習を行った後、入力される前記駆動電流と前記回転速度とにより、診断学習モデルベースで前記減速機の異常を診断することを特徴とするロボット減速機の診断装置。
続きを表示(約 990 文字)
【請求項2】
前記診断結果を出力する出力モジュール、をさらに含み、
前記プロセッサは、前記減速機の異常を診断した診断結果を前記出力モジュールを介して出力することを特徴とする請求項1に記載のロボット減速機の診断装置。
【請求項3】
前記モータ状態入力モジュールは、前記駆動モータを駆動するモータドライバからネットワークを介して前記駆動電流と前記回転速度とが入力されることを特徴とする請求項1に記載のロボット減速機の診断装置。
【請求項4】
前記プロセッサは、前記減速機の診断結果をモータドライバに出力することを特徴とする請求項1に記載のロボット減速機の診断装置。
【請求項5】
前記プロセッサは、前記減速機の診断結果を前記格納装置に格納し、診断学習モデルを周期的に改善することを特徴とする請求項1に記載のロボット減速機の診断装置。
【請求項6】
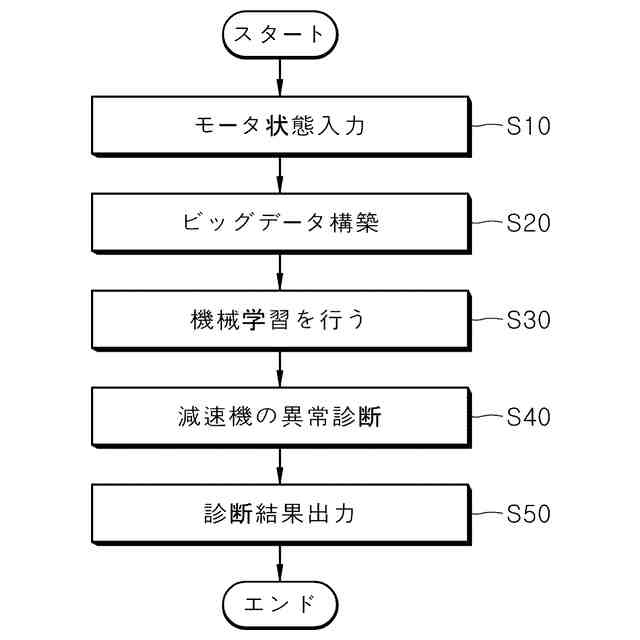
プロセッサが、モータ状態入力モジュールを介して駆動モータの駆動電流と回転速度とが入力されるステップと、
前記プロセッサが、入力された前記駆動電流と前記回転速度とに基づいて、ビッグデータを構築して格納装置に格納するステップと、
前記プロセッサが、前記駆動電流と前記回転速度とに基づいて、減速機を診断するための学習モデルを構築して機械学習を行うステップと、
前記プロセッサが、前記モータ状態入力モジュールから入力される前記駆動電流と前記回転速度とにより、診断学習モデルベースで前記減速機の異常を診断するステップと、を含むことを特徴とするロボット減速機の診断方法。
【請求項7】
前記プロセッサが、前記減速機の異常を診断した診断結果を出力モジュールを介して出力するステップ、をさらに含むことを特徴とする請求項6に記載のロボット減速機の診断方法。
【請求項8】
前記プロセッサが、前記減速機の診断結果をモータドライバに出力するステップ、をさらに含むことを特徴とする請求項6に記載のロボット減速機の診断方法。
【請求項9】
前記プロセッサが、前記減速機の診断結果を前記格納装置に格納し、診断学習モデルを周期的に改善するステップ、をさらに含むことを特徴とする請求項6に記載のロボット減速機の診断方法。
発明の詳細な説明
【技術分野】
【0001】
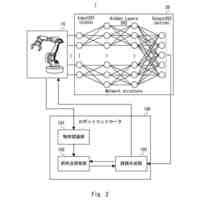
本発明は、ロボット減速機の診断装置およびその方法に関し、より詳しくは、ロボットの減速機に直結した駆動モータに印加される電流と速度とを検出し、マシンラーニングベースで学習して故障を診断し、寿命を予測するロボット減速機の診断装置およびその方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
一般的に、産業用ロボットとは、対象物を自動的にハンドリングするための目的に符合する工具を備えた状態で、多数の運動軸に対して、特に、方位(orientation)、位置および作業の進行に関連してプログラミング可能なハンドリング機械をいう。
【0003】
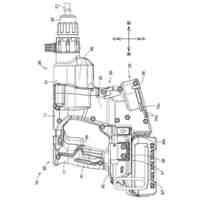
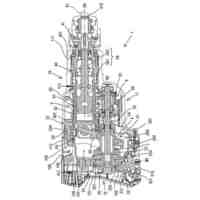
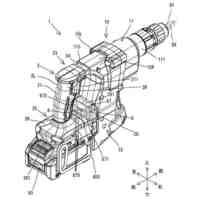
このような産業用ロボットは、対象物に対する製造工程を行うためのツールと、前記ツールが設けられる手首部と、手首部の位置を変更するアームユニットおよびアッパーユニットと、旋回軸を中心に回転して手首部の向く方向を変更させるための旋回部と、旋回部を支持するベース部と、製造工程を行うための駆動力を提供する駆動部とを含む。
【0004】
ここで、駆動部は、駆動モータおよび減速機を含むことができるが、減速機の内部には、潤滑のための潤滑油が収容されている。このような減速機は、構成材料が鉄成分であって、駆動部の運転時間によって摩耗して潤滑油に混ざるようになる。このような潤滑油に混ざった異物は、製造工程を行う過程で突然の減速機の誤作動をもたらすが、これを解決するためには、工程ラインに設けられた複数の産業用ロボットをすべて停止させなければならない。
【0005】
本発明の背景技術は、大韓民国公開特許公報第10-2016-0083392号(2016.07.12.公開、産業用ロボットシステム)に開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0006】
このように、産業用ロボットの減速機に誤動作が発生した場合、減速機と駆動モータとが直接的に接触した構造となっていて、駆動モータの過熱が減速機ハウジングを介して伝達されながら減速機に影響を及ぼすことはもちろん、駆動モータ自体の高熱によって駆動モータのエンコーダ損傷の恐れがあり、また、減速機ハウジングを介した駆動モータの高熱が伝達される場合、減速機ハウジング内の潤滑グリースの寿命が短縮するなどの問題点があった。
【0007】
本発明は、上記の問題点を改善するためになされたものであって、一態様による本発明の目的は、ロボットの減速機に直結した駆動モータに印加される電流と速度とを検出し、マシンラーニングベースで学習して故障を診断し、寿命を予測するロボット減速機の診断装置およびその方法を提供する。
【課題を解決するための手段】
【0008】
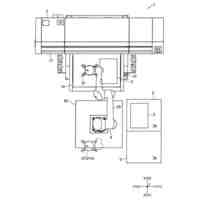
本発明の一態様によるロボット減速機の診断装置は、減速機に直結した駆動モータの駆動状態が入力されたモータ状態入力モジュールと、格納装置と、実行プログラムが格納されたメモリと、モータ状態入力モジュール、格納装置、およびメモリと作動的に連結(operatively coupled to)されたプロセッサと、を含み、プロセッサは、モータ状態入力モジュールから駆動電流と回転速度とが入力されて、ビッグデータを構築して格納装置に格納し、格納装置に格納された駆動電流と回転速度とに基づいて、減速機を診断するための学習モデルを構築して機械学習を行った後、入力される駆動電流と回転速度とにより、診断学習モデルベースで減速機の異常を診断することを特徴とする。
【0009】
本発明は、診断結果を出力する出力モジュール、をさらに含み、プロセッサは、減速機の異常を診断した診断結果を出力モジュールを介して出力することを特徴とする。
【0010】
本発明において、モータ状態入力モジュールは、駆動モータを駆動するモータドライバからネットワークを介して駆動電流と回転速度とが入力されることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
10日前
株式会社マキタ
電動工具
18日前
株式会社マキタ
電動工具
3日前
川崎重工業株式会社
ロボットリスト
18日前
川崎重工業株式会社
ロボットアーム
18日前
川崎重工業株式会社
ロボットアーム
18日前
日本車輌製造株式会社
締め付け工具
18日前
川崎重工業株式会社
ロボットシステム
18日前
CKD株式会社
吸着型搬送装置
1か月前
日本信号株式会社
作業機制御システム
3日前
川崎重工業株式会社
塗装ロボット
1か月前
長堀工業株式会社
締結装置
1か月前
株式会社京阪エンジニアリング
脱着装置
4日前
ジヤトコ株式会社
圧入装置
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社アマダ
磁気吸着装置
1か月前
株式会社スター精機
ワーク搬送装置
7日前
株式会社マキタ
集塵アタッチメント
3日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
制御装置及び制御方法
18日前
工機ホールディングス株式会社
作業機
1か月前
モトコマ株式会社
寄せポンチホルダー
19日前
川崎重工業株式会社
ロボットシステム
10日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社DailyColor
ロボットハンド
19日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
有限会社松尾エンジニアリング
連結部材
19日前
個人
ターンバックル用工具
25日前
トヨタ自動車株式会社
経路決定システム及び方法
1か月前
株式会社SHIN‐JIGEN
上肢アシスト装置
24日前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ