TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025015958
公報種別
公開特許公報(A)
公開日
2025-01-31
出願番号
2023118901
出願日
2023-07-21
発明の名称
多関節ロボット、多関節ロボットの制御方法、ロボットシステム、及び、物品の製造方法
出願人
ローレルバンクマシン株式会社
,
ローレル機械株式会社
,
ローレル精機株式会社
代理人
弁理士法人旺知国際特許事務所
主分類
B25J
9/06 20060101AFI20250124BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
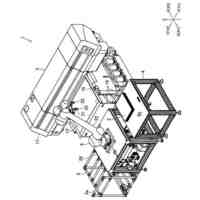
【課題】基部の周辺であっても多関節ロボットの作業可能領域を狭めることなく、高精度にロボットの先端部を制御する。
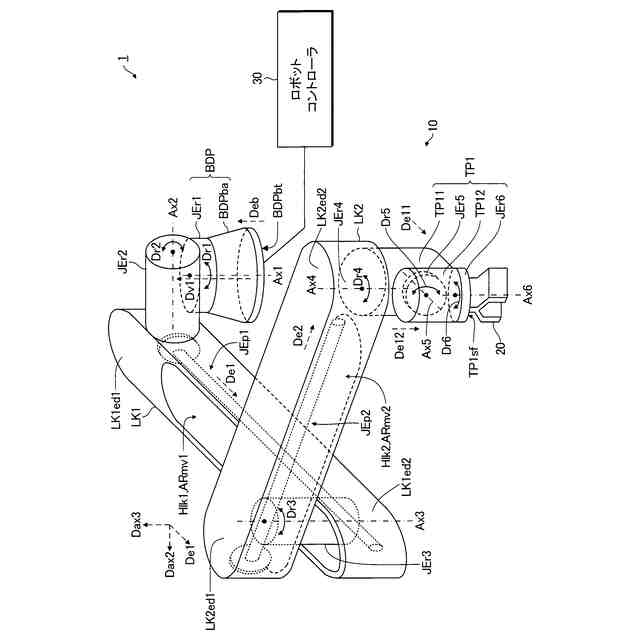
【解決手段】ロボット10は、リンクLK1及びLK2と、リンクLK1が延在する方向De1とのなす角度が所定の角度より大きい軸Ax3を第1回転軸としてリンクLK2をリンクLK1に対して回転させる関節機構JEr3と、方向De1に沿って関節機構JEr3をリンクLK1に対して移動させる関節機構JEp1と、リンクLK2の延在方向に沿ってリンクLK2を関節機構JEr3に対して移動させる関節機構JEp2と、ボディ部BDPの底面BDPbtに垂直な方向Dv1とのなす角度が所定の角度より大きい軸Ax2を第3回転軸としてリンクLK1を回転させる関節機構JEr2とを有する。方向De1からの平面視において、第1回転軸に沿う方向Dax3と第3回転軸に沿う方向Dax2とは、所定の角度以上の第1角度で交差する。
【選択図】図1
特許請求の範囲
【請求項1】
基部と、
先端部と、
第1リンク及び第2リンクを含み、前記基部と前記先端部とを接続する複数のリンクと、
前記第1リンクと前記第2リンクとを接続し、前記第1リンクが延在する第1方向とのなす角度が所定の角度より大きい軸を第1回転軸として前記第2リンクを前記第1リンクに対して回転させる第1駆動機構と、
前記第1方向に沿って、前記第1駆動機構を前記第1リンクに対して相対的に移動させる第1移動機構と、
前記第2リンクが延在する第2方向に沿って、前記第2リンクを前記第1駆動機構に対して相対的に移動させる第2移動機構と、
前記基部の底面に垂直な方向とのなす角度が前記所定の角度以下の軸を第2回転軸として、前記基部の少なくとも一部分を回転させる第2駆動機構と、
前記基部と前記第1リンクとを接続し、前記基部の底面に垂直な方向とのなす角度が前記所定の角度より大きい軸を第3回転軸として前記第1リンクを回転させる第3駆動機構と、
を備え、
前記第1方向からの平面視において、前記第1回転軸に沿う方向と前記第3回転軸に沿う方向は、前記所定の角度以上の第1角度で交差している、
ことを特徴とする多関節ロボット。
続きを表示(約 1,900 文字)
【請求項2】
前記第1角度は、実質的に90度である、
ことを特徴とする請求項1に記載の多関節ロボット。
【請求項3】
前記第2リンクと前記先端部とを接続し、前記先端部を前記第2リンクに対して回転させる第4駆動機構をさらに有し、
前記第4駆動機構は、
前記第2方向とのなす角度が前記所定の角度より大きい軸を第4回転軸として、前記先端部を前記第2リンクに対して回転させ、
前記先端部は、
前記第2リンクに接続される第1部分と、
前記第1部分に接続される第2部分と、
前記第1部分と前記第2部分とを接続し、前記第4回転軸とのなす角度が前記所定の角度より大きい軸を第5回転軸として、前記第2部分を前記第1部分に対して回転させる第5駆動機構と、
前記第5回転軸とのなす角度が前記所定の角度より大きい軸を第6回転軸として、前記先端部のうちエンドエフェクタが取り付けられる部分を回転させる第6駆動機構と、
を含む、
ことを特徴とする請求項2に記載の多関節ロボット。
【請求項4】
前記第2リンクと前記先端部とを接続し、前記先端部を前記第2リンクに対して回転させる第4駆動機構をさらに有し、
前記第4駆動機構は、
前記第2方向とのなす角度が前記所定の角度以下の軸を第4回転軸として、前記先端部を前記第2リンクに対して回転させ、
前記先端部は、
前記第2リンクに接続される第1部分と、
前記第1部分に接続される第2部分と、
前記第1部分と前記第2部分とを接続し、前記第4回転軸とのなす角度が前記所定の角度より大きい軸を第5回転軸として、前記第2部分を前記第1部分に対して回転させる第5駆動機構と、
前記第5回転軸とのなす角度が前記所定の角度より大きい軸を第6回転軸として、前記先端部のうちエンドエフェクタが取り付けられる部分を回転させる第6駆動機構と、
を含む、
ことを特徴とする請求項2に記載の多関節ロボット。
【請求項5】
前記第1駆動機構を駆動する第1モータと、
前記第1移動機構を駆動する第2モータと、
前記第2移動機構を駆動する第3モータと、
前記第2駆動機構を駆動する第4モータと、
前記第3駆動機構を駆動する第5モータと、
をさらに有し、
前記第1移動機構は、
前記第1リンクの内部に配置され、前記第1方向に延在し、前記第2モータの回転に伴い、前記第1方向に沿う軸を回転軸として回転する第1ねじ部と、
前記第1駆動機構に接続され、前記第1ねじ部が挿通され、前記第1ねじ部の回転に伴い、前記第1ねじ部に対して相対的に移動する第1移動部と、
を有し、
前記第2移動機構は、
前記第2リンクの内部に配置され、前記第2方向に延在し、前記第3モータの回転に伴い、前記第2方向に沿う軸を回転軸として回転する第2ねじ部と、
前記第1駆動機構に接続され、前記第2ねじ部が挿通され、前記第2ねじ部の回転に伴い、前記第2ねじ部に対して相対的に移動する第2移動部と、
を有し、
前記第1駆動機構は、前記第1移動部の移動に伴い、前記第1リンクに対して相対的に移動し、
前記第2リンクは、前記第2移動部の移動に伴い、前記第1駆動機構に対して相対的に移動する、
ことを特徴とする請求項2に記載の多関節ロボット。
【請求項6】
請求項5に記載の多関節ロボットの制御方法であって、
前記多関節ロボットの動作を制御する制御装置は、
前記第1モータ、前記第2モータ及び前記第3モータを制御することにより、前記多関節ロボットの前記先端部が所定の平面に沿って移動するように、前記多関節ロボットの動作を制御する、
ことを特徴とする多関節ロボットの制御方法。
【請求項7】
請求項5に記載の多関節ロボットと、
前記先端部に取り付けられたエンドエフェクタと、
前記多関節ロボット及び前記エンドエフェクタの動作を制御する制御装置と、
を備え、
前記制御装置は、
前記第1モータ、前記第2モータ、前記第3モータ、前記第4モータ及び前記第5モータを制御することにより、前記多関節ロボットの動作を制御する、
ことを特徴とするロボットシステム。
【請求項8】
請求項7に記載のロボットシステムにより、部品を組み付ける、又は、部品を取り除く、
ことを特徴とする物品の製造方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、多関節ロボット、多関節ロボットの制御方法、ロボットシステム、及び、物品の製造方法に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
人と同様の動作を行うロボットとして、多関節ロボットが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開昭61-136782号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、従来の多関節ロボットの場合、ロボットのアーム同士が干渉するため、ロボットの先端部が到達できる領域に制限があり、多関節ロボットの作業可能領域を狭めていた。特にロボットの根本側に位置する、アームが取り付けられている基部の周辺は、アーム同士が干渉しやすく作業可能領域外となる領域が多くなる。すなわち、2つのアームを有するロボットの場合、2つのアームのなす角が0°に近づくためアーム同士が干渉してしまう。また、作業可能領域内であった場合でも、先端部の制御は2つのアームを介して行われるため、精度を高めるにも限界があった。このため、基部の周辺であっても多関節ロボットの作業可能領域を狭めることなく、高精度にロボットの先端部を制御することが望まれている。
【課題を解決するための手段】
【0005】
本発明の好適な態様に係る多関節ロボットは、基部と、先端部と、第1リンク及び第2リンクを含み、前記基部と前記先端部とを接続する複数のリンクと、前記第1リンクと前記第2リンクとを接続し、前記第1リンクが延在する第1方向とのなす角度が所定の角度より大きい軸を第1回転軸として前記第2リンクを前記第1リンクに対して回転させる第1駆動機構と、前記第1方向に沿って、前記第1駆動機構を前記第1リンクに対して相対的に移動させる第1移動機構と、前記第2リンクが延在する第2方向に沿って、前記第2リンクを前記第1駆動機構に対して相対的に移動させる第2移動機構と、前記基部の底面に垂直な方向とのなす角度が前記所定の角度以下の軸を第2回転軸として、前記基部の少なくとも一部分を回転させる第2駆動機構と、前記基部と前記第1リンクとを接続し、前記基部の底面に垂直な方向とのなす角度が前記所定の角度より大きい軸を第3回転軸として前記第1リンクを回転させる第3駆動機構と、を備え、前記第1方向からの平面視において、前記第1回転軸に沿う方向と前記第3回転軸に沿う方向は、前記所定の角度以上の第1角度で交差している。
【0006】
本発明の好適な態様に係る多関節ロボットの制御方法は、上述の多関節ロボットにおいて、前記第1駆動機構を駆動する第1モータと、前記第1移動機構を駆動する第2モータと、前記第2移動機構を駆動する第3モータと、前記第2駆動機構を駆動する第4モータと、前記第3駆動機構を駆動する第5モータと、をさらに有し、前記第1移動機構は、前記第1リンクの内部に配置され、前記第1方向に延在し、前記第2モータの回転に伴い、前記第1方向に沿う軸を回転軸として回転する第1ねじ部と、前記第1駆動機構に接続され、前記第1ねじ部が挿通され、前記第1ねじ部の回転に伴い、前記第1ねじ部に対して相対的に移動する第1移動部と、を有し、前記第2移動機構は、前記第2リンクの内部に配置され、前記第2方向に延在し、前記第3モータの回転に伴い、前記第2方向に沿う軸を回転軸として回転する第2ねじ部と、前記第1駆動機構に接続され、前記第2ねじ部が挿通され、前記第2ねじ部の回転に伴い、前記第2ねじ部に対して相対的に移動する第2移動部と、を有し、前記第1駆動機構は、前記第1移動部の移動に伴い、前記第1リンクに対して相対的に移動し、前記第2リンクは、前記第2移動部の移動に伴い、前記第1駆動機構に対して相対的に移動し、前記第1角度は、実質的に90度である、多関節ロボットの制御方法であって、前記多関節ロボットの動作を制御する制御装置は、前記第1モータ、前記第2モータ及び前記第3モータを制御することにより、前記多関節ロボットの前記先端部が所定の平面に沿って移動するように、前記多関節ロボットの動作を制御する。
【0007】
本発明の好適な態様に係るロボットシステムは、上述の多関節ロボットにおいて、前記第1駆動機構を駆動する第1モータと、前記第1移動機構を駆動する第2モータと、前記第2移動機構を駆動する第3モータと、前記第2駆動機構を駆動する第4モータと、前記第3駆動機構を駆動する第5モータと、をさらに有し、前記第1移動機構は、前記第1リンクの内部に配置され、前記第1方向に延在し、前記第2モータの回転に伴い、前記第1方向に沿う軸を回転軸として回転する第1ねじ部と、前記第1駆動機構に接続され、前記第1ねじ部が挿通され、前記第1ねじ部の回転に伴い、前記第1ねじ部に対して相対的に移動する第1移動部と、を有し、前記第2移動機構は、前記第2リンクの内部に配置され、前記第2方向に延在し、前記第3モータの回転に伴い、前記第2方向に沿う軸を回転軸として回転する第2ねじ部と、前記第1駆動機構に接続され、前記第2ねじ部が挿通され、前記第2ねじ部の回転に伴い、前記第2ねじ部に対して相対的に移動する第2移動部と、を有し、前記第1駆動機構は、前記第1移動部の移動に伴い、前記第1リンクに対して相対的に移動し、前記第2リンクは、前記第2移動部の移動に伴い、前記第1駆動機構に対して相対的に移動し、前記第1角度は、実質的に90度である、多関節ロボットと、前記先端部に取り付けられたエンドエフェクタと、前記多関節ロボット及び前記エンドエフェクタの動作を制御する制御装置と、を備え、前記制御装置は、前記第1モータ、前記第2モータ、前記第3モータ、前記第4モータ及び前記第5モータを制御することにより、前記多関節ロボットの動作を制御する。
【0008】
本発明の好適な態様に係る物品の製造方法は、上述のロボットシステムにより、部品を組み付ける、又は、部品を取り除く。
【発明の効果】
【0009】
本発明によれば、基部の周辺であっても多関節ロボットの作業可能領域を狭めることなく、高精度にロボットの先端部を制御することができる。
【図面の簡単な説明】
【0010】
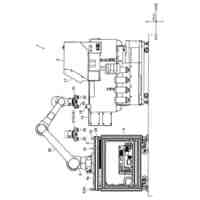
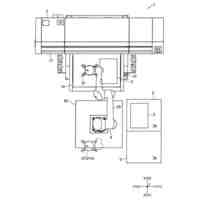
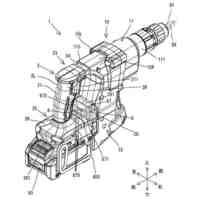
実施形態に係るロボットシステムの概要を説明するための説明図である。
関節機構の一例を説明するための説明図である。
ロボットの先端部を接地面に対して水平方向に移動させる動作の一例を説明するための説明図である。
図3に示したロボットの動作の続きの動作を説明するための説明図である。
複数の関節機構のうち、直動関節に対応する2つの関節機構のみを駆動することにより実現される動作の一例を説明するための説明図である。
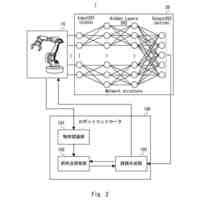
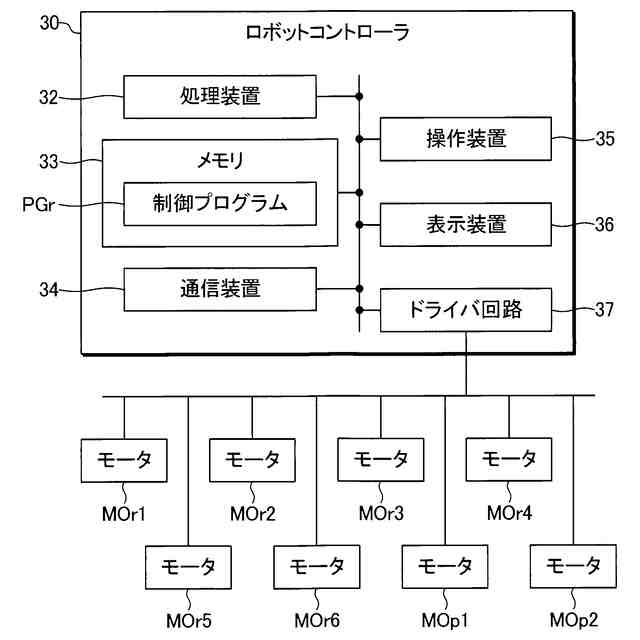
図1に示したロボットコントローラのハードウェア構成の一例を示す図である。
第1変形例に係る先端部の一例を説明するための説明図である。
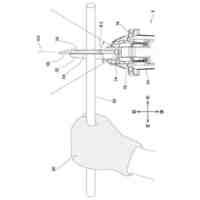
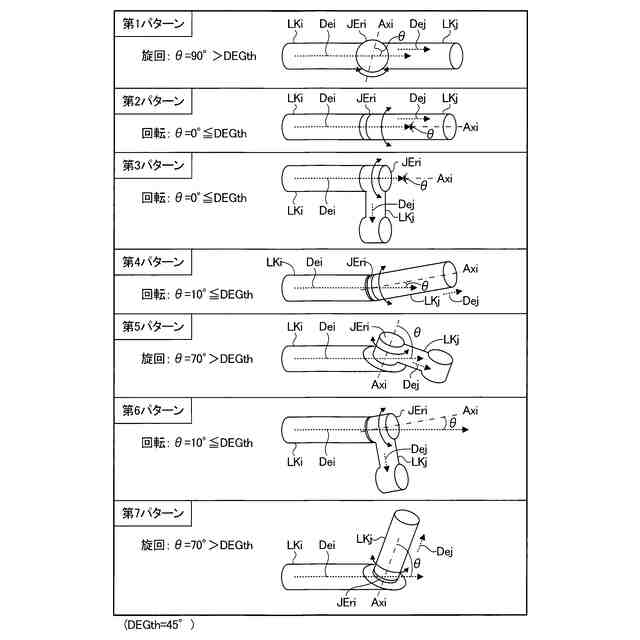
旋回の一例を説明するための説明図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
10日前
株式会社マキタ
電動工具
3日前
株式会社マキタ
電動工具
18日前
川崎重工業株式会社
ロボットアーム
18日前
日本車輌製造株式会社
締め付け工具
18日前
川崎重工業株式会社
ロボットリスト
18日前
川崎重工業株式会社
ロボットアーム
18日前
川崎重工業株式会社
ロボットシステム
18日前
日本信号株式会社
作業機制御システム
3日前
CKD株式会社
吸着型搬送装置
1か月前
株式会社京阪エンジニアリング
脱着装置
4日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
長堀工業株式会社
締結装置
1か月前
ジヤトコ株式会社
圧入装置
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社アマダ
磁気吸着装置
1か月前
株式会社マキタ
集塵アタッチメント
3日前
株式会社スター精機
ワーク搬送装置
7日前
モトコマ株式会社
寄せポンチホルダー
19日前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
10日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
制御装置及び制御方法
18日前
個人
ターンバックル用工具
25日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社DailyColor
ロボットハンド
19日前
有限会社松尾エンジニアリング
連結部材
19日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
トヨタ自動車株式会社
経路決定システム及び方法
1か月前
株式会社SHIN‐JIGEN
上肢アシスト装置
24日前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
10日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ