TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025011995
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023114497
出願日
2023-07-12
発明の名称
動作監視システム、及び動作監視方法
出願人
住友重機械搬送システム株式会社
代理人
個人
,
個人
,
個人
主分類
B66C
13/00 20060101AFI20250117BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】クレーンと対象物との干渉の可能性を早い段階で把握することができる動作監視システム、及び動作監視方法を提供する。
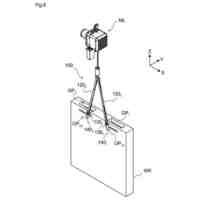
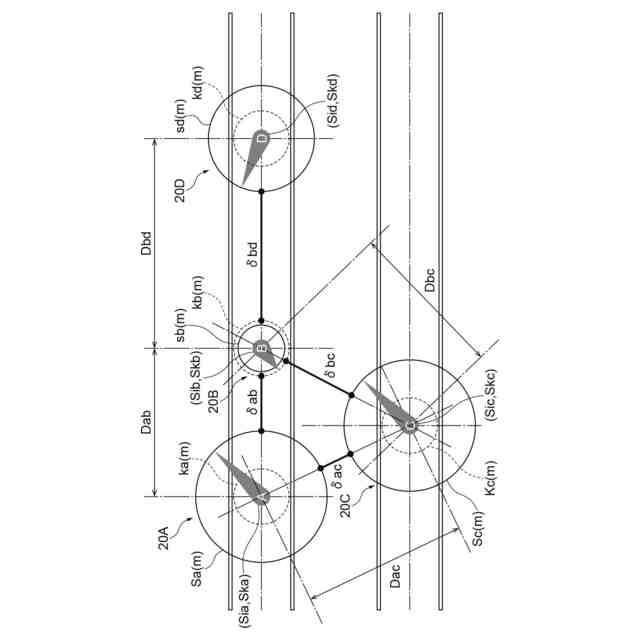
【解決手段】他の対象物であるクレーン20Bの対象物情報とGPSによる位置情報とを照らし合わせることで、クレーン20Aとクレーン20Bとが遠い位置であっても、両者の位置関係を把握し、クレーン20Bの対象物情報とクレーン20Aの構造に関する構造情報とを照らし合わせることで、クレーン20Aのどのような箇所が他のクレーン20Bと干渉し得るかを把握する。判定部は、位置情報、構造情報、及び対象物情報に基づいて演算した判定値と、予め設定した閾値とを比較することでクレーン20Aと他のクレーン20Bとの状態判定を行う。判定部は、クレーン20Aと他のクレーン20Bの距離によらず、早い段階で干渉の可能性を把握することが可能となる。
【選択図】図8
特許請求の範囲
【請求項1】
走行するクレーンの動作を監視する動作監視システムであって、
前記クレーンに配置されたGPSで前記クレーンの位置情報を検出する位置情報検出部と、
前記クレーンの構造に関する構造情報を取得する構造情報取得部と、
前記クレーン以外の対象物に関する対象物情報を取得する対象物情報取得部と、
前記位置情報、前記構造情報、及び前記対象物情報に基づいて演算した判定値と、予め設定した閾値とを比較することで前記クレーンと前記対象物との状態判定を行う判定部と、を備える、動作監視システム。
続きを表示(約 790 文字)
【請求項2】
前記クレーンは、旋回クレーンであり、
前記構造情報には、前記旋回クレーンの旋回半径の情報が含まれる、請求項1に記載された動作監視システム。
【請求項3】
前記GPSのサンプリング値から算出される所定期間の移動量が、許容値を超えた場合、前記位置情報を用いた制御を停止する、請求項1に記載された動作監視システム。
【請求項4】
前記判定部は、前記クレーンが前記対象物に対して相対的に近付く傾向にあることを判定する、請求項1に記載された動作監視システム。
【請求項5】
前記対象物は走行すると共にGPSを有し、
前記対象物の前記GPSの情報を保持する保持部を更に備え、
前記クレーンの前記対象物情報取得部は、前記保持部から前記対象物の位置情報を取得する、請求項1に記載された動作監視システム。
【請求項6】
前記位置情報検出部は、前記クレーンの前記位置情報を前記保持部へ送信する、請求項5に記載された動作監視システム。
【請求項7】
前記判定部が用いる前記閾値は、調整可能である、請求項1に記載された動作監視システム。
【請求項8】
走行するクレーンの動作を監視する動作監視方法であって、
前記クレーンに配置されたGPSで前記クレーンの位置情報を検出する位置情報検出ステップと、
前記クレーンの構造に関する構造情報を取得する構造情報取得ステップと、
前記クレーン以外の対象物に関する対象物情報を取得する対象物情報取得ステップと、
前記位置情報、前記構造情報、及び前記対象物情報に基づいて演算した判定値と、予め設定した閾値とを比較することで前記クレーンと前記対象物との状態判定を行う判定ステップと、を備える、動作監視方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、動作監視システム、及び動作監視方法に関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、クレーンの動作を監視する動作監視システムとして、特許文献1に記載されたようなものが知られている。特許文献1に記載された動作監視システムは、クレーンとの干渉の可能性がある干渉領域を設定する領域設定部と、領域設定部で設定された干渉領域を用いてクレーンの動作の監視を行う監視部と、を備える。
【先行技術文献】
【特許文献】
【0003】
特開2022-93056号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、上述の動作監視システムは、クレーンとクレーンとが互いに近くまで近接した場合の状態における干渉の可能性を監視していた。これに対し、クレーンと対象物との干渉の可能性を早い段階で把握できるシステムがもとめられていた。
【0005】
本発明は、このような課題を解決するためになされたものであり、クレーンと対象物との干渉の可能性を早い段階で把握することができる動作監視システム、及び動作監視方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の動作監視システムは、走行するクレーンの動作を監視する動作監視システムであって、クレーンに配置されたGPSでクレーンの位置情報を検出する位置情報検出部と、クレーンの構造に関する構造情報を取得する構造情報取得部と、クレーン以外の対象物に関する対象物情報を取得する対象物情報取得部と、位置情報、構造情報、及び対象物情報に基づいて演算した判定値と、予め設定した閾値とを比較することでクレーンと対象物との状態判定を行う判定部と、を備える。
【0007】
本発明の動作監視システムは、クレーンに配置されたGPSでクレーンの位置情報を検出する位置情報検出部を備える。この場合、他の対象物の対象物情報とGPSによる位置情報とを照らし合わせることで、クレーンと対象物とが遠い位置であっても、両者の位置関係を把握することができる。また、他の対象物の対象物情報とクレーンの構造に関する構造情報とを照らし合わせることで、クレーンのどのような箇所が対象物と干渉し得るかを把握することができる。これに対し、判定部は、位置情報、構造情報、及び対象物情報に基づいて演算した判定値と、予め設定した閾値とを比較することでクレーンと対象物との状態判定を行う。従って、判定部は、クレーンと対象物の距離によらず、早い段階で干渉の可能性を把握することが可能となる。
【0008】
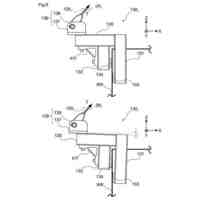
クレーンは、旋回クレーンであり、構造情報には、旋回クレーンの旋回半径の情報が含まれてよい。旋回クレーンの旋回半径の範囲内は、荷役部が通過し得る範囲であるため、対象物との干渉の可能性がある。従って、構造情報に旋回半径の情報を含ませることで、旋回クレーンと対象物との干渉の可能性を正確に把握することができる。
【0009】
GPSのサンプリング値から算出される所定期間の移動量が、許容値を超えた場合、位置情報を用いた制御を停止してよい。GPSの位置情報の誤差が大きくなった場合、監視の信頼性が低下することを抑制できる。
【0010】
判定部は、クレーンが対象物に対して相対的に近付く傾向にあることを判定してよい。この場合、クレーンが対象物に近接する前段階で、干渉の可能性を把握することが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
懸吊装置
5か月前
ユニパルス株式会社
吊具
12か月前
ユニパルス株式会社
吊具
7か月前
ユニパルス株式会社
吊具
11か月前
個人
海上コンテナ昇降装置
1か月前
ユニパルス株式会社
吊具装置
2か月前
ユニパルス株式会社
荷役装置
1か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社豊田自動織機
荷役車両
9か月前
株式会社豊田自動織機
荷役車両
11か月前
株式会社豊田自動織機
荷役車両
10か月前
株式会社豊田自動織機
荷役車両
16日前
株式会社豊田自動織機
荷役車両
6か月前
株式会社豊田自動織機
荷役車両
1か月前
株式会社北川鉄工所
吊荷制御方法
11か月前
株式会社日本キャリア工業
昇降機
5か月前
ユニパルス株式会社
荷役助力装置
9か月前
個人
建築部材の吊り上げ装置
3か月前
フジテック株式会社
エレベータ
23日前
株式会社豊田自動織機
フォークリフト
7か月前
株式会社ニシキ
可変型吊り天秤
8か月前
株式会社大林組
養生方法
4か月前
大同特殊鋼株式会社
治具
10か月前
フジテック株式会社
エレベータ
11か月前
ブラザー工業株式会社
架台
7か月前
ブラザー工業株式会社
架台
7か月前
有限会社サエキ
玉掛用器具
1か月前
小野谷機工株式会社
ジャッキ装置
7か月前
白山工業株式会社
腕重量補償機構
4か月前
株式会社タダノ
高所作業車
4か月前
ウエダ産業株式会社
鋼板保持装置
6か月前
株式会社キトー
吊具
5か月前
株式会社タダノ
クレーン装置
7か月前
株式会社スギヤス
車両整備用リフト
2か月前
株式会社タダノ
クレーン装置
1か月前
株式会社スギヤス
車両整備用リフト
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ