TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025011243
公報種別
公開特許公報(A)
公開日
2025-01-23
出願番号
2024179397,2023126335
出願日
2024-10-11,2019-04-12
発明の名称
駆動システム
出願人
株式会社ニコン
代理人
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250116BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】エンドエフェクタの位置決め精度の向上を図る。
【解決手段】駆動システムは、ワークに対して作業可能なエンドエフェクタが変位可能な状態で前記エンドエフェクタを支持する支持部と、前記支持部と前記エンドエフェクタの間に配置される駆動部であって、前記支持部を介して前記エンドエフェクタを駆動可能な第1駆動部の第1ストロークより小さい第2ストロークで、前記支持部に対して前記エンドエフェクタを駆動可能な第2駆動部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
ワークに対して作業可能なエンドエフェクタが変位可能な状態で前記エンドエフェクタを支持する支持部と、
前記支持部と前記エンドエフェクタの間に配置される駆動部であって、
前記支持部を介して前記エンドエフェクタを駆動可能な第1駆動部の第1ストロークより小さい第2ストロークで、前記支持部に対して前記エンドエフェクタを駆動可能な第2駆動部と、
を備える駆動システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、駆動システムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、ロボットアームとエンドエフェクタとを有し、例えば、製品の組み立てなどの用途に利用されるロボット装置に関する技術が開示されている(例えば、特許文献1を参照)。上記のような従来技術においては、エンドエフェクタの位置決め精度の向上を図ることが困難であった。
【先行技術文献】
【特許文献】
【0003】
米国特許第4994639号明細書
【発明の概要】
【0004】
第1の態様によれば、ワークに対して作業可能なエンドエフェクタが変位可能な状態で前記エンドエフェクタを支持する支持部と、前記支持部と前記エンドエフェクタの間に配置される駆動部であって、前記支持部を介して前記エンドエフェクタを駆動可能な第1駆動部の第1ストロークより小さい第2ストロークで、前記支持部に対して前記エンドエフェクタを駆動可能な第2駆動部と、を備える駆動システムが提供される。
【図面の簡単な説明】
【0005】
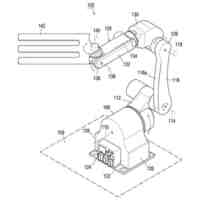
本実施形態のロボットシステムの構成の一例を示す図である。
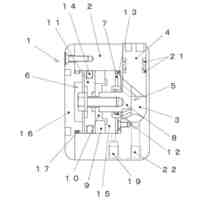
本実施形態のアーム部とエンドエフェクタとの接続部分の構成の一例を示す図である。
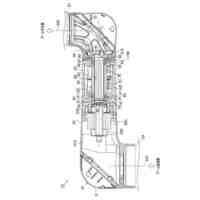
本実施形態のリニアモータの配置の一例を示す図である。
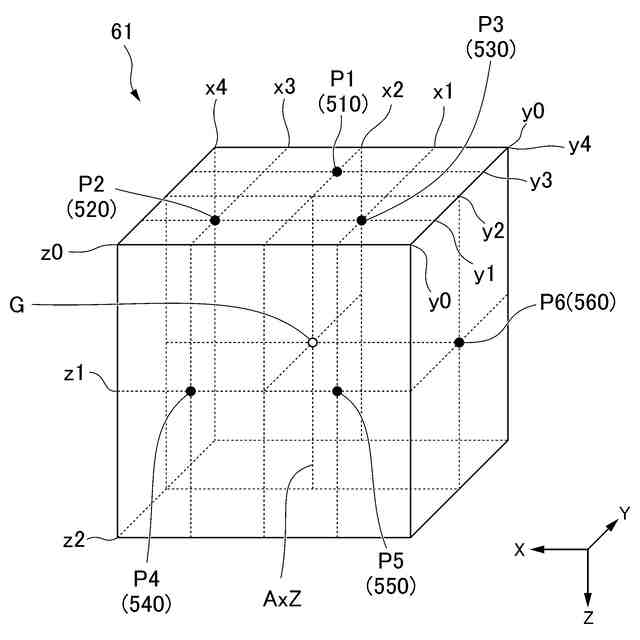
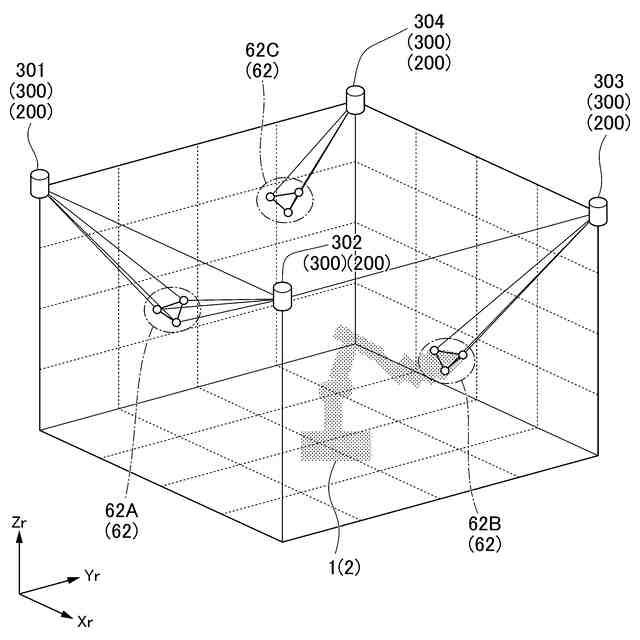
本実施形態のエンドエフェクタの位置検出の一例を示す図である。
本実施形態のエンドエフェクタの位置検出の他の一例を示す図である。
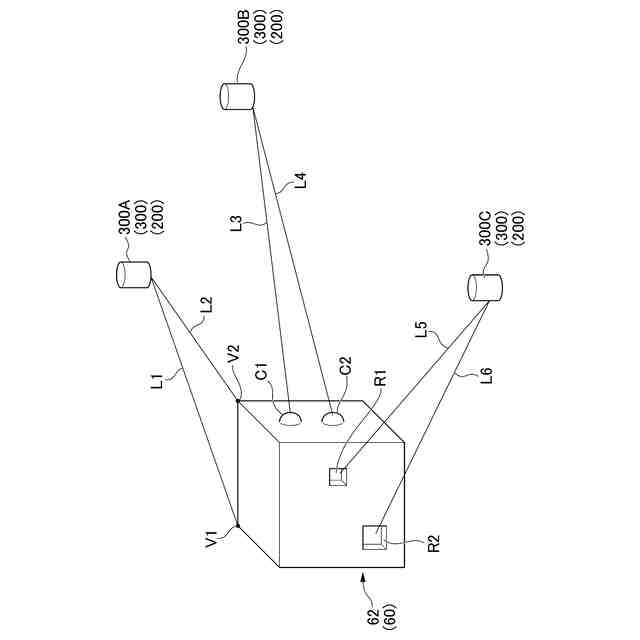
本実施形態の検出部の配置の一例を示す図である。
本実施形態の検出部の配置の具体例を示す図である。
本実施形態の検出部の検出方式の一例を示す図である。
本実施形態の検出部の配置の他の一例を示す図である。
本実施形態のエンドエフェクタの外観構成の一例を示す斜視図である。
本実施形態のエンドエフェクタの外観構成の一例を示す底面図である。
本実施形態のエンドエフェクタの外観構成の一例を示す側面図である。
本実施形態のエンドエフェクタのハンド部がワークを把持している状態の一例を示す図である。
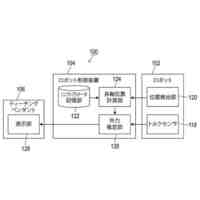
本実施形態の制御装置の機能構成の一例を示す図である。
【発明を実施するための形態】
【0006】
以下、図面を参照して、本発明の実施形態を説明する。
【0007】
[ロボットシステムの構成]
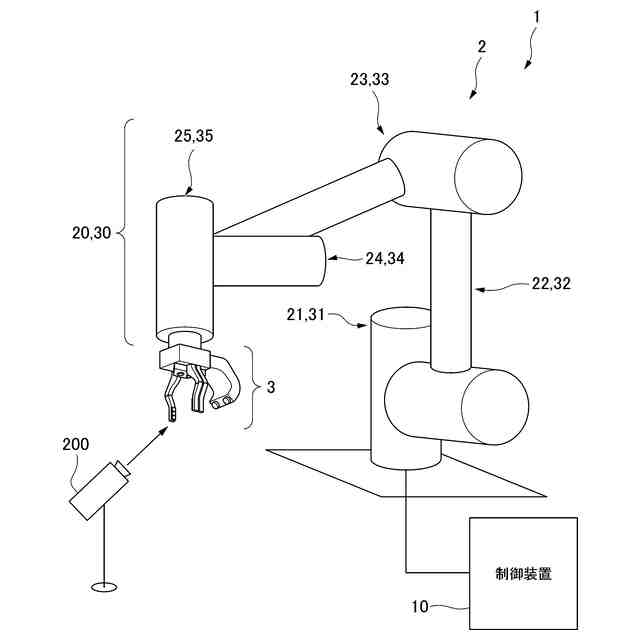
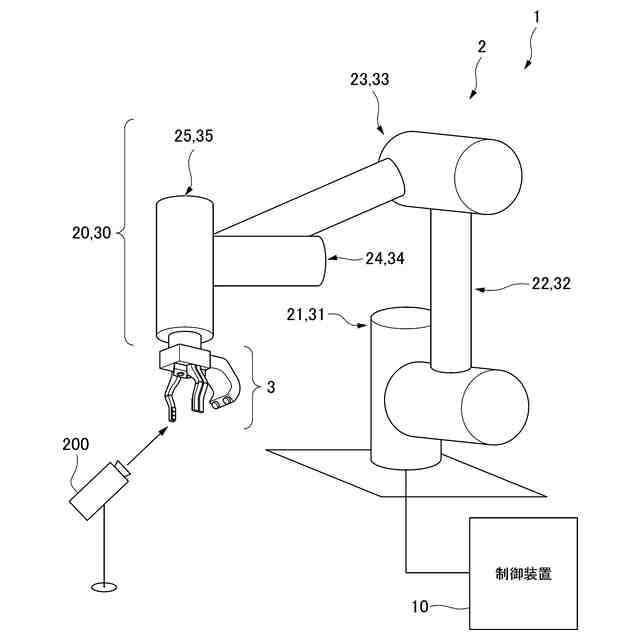
図1は、本実施形態のロボットシステム1の構成の一例を示す図である。ロボットシステム1は、ロボットユニット2と、エンドエフェクタユニット3と、検出部200と、制御装置10とを備える。
ロボットユニット2は、アーム部20と、アーム駆動部30とを備える。
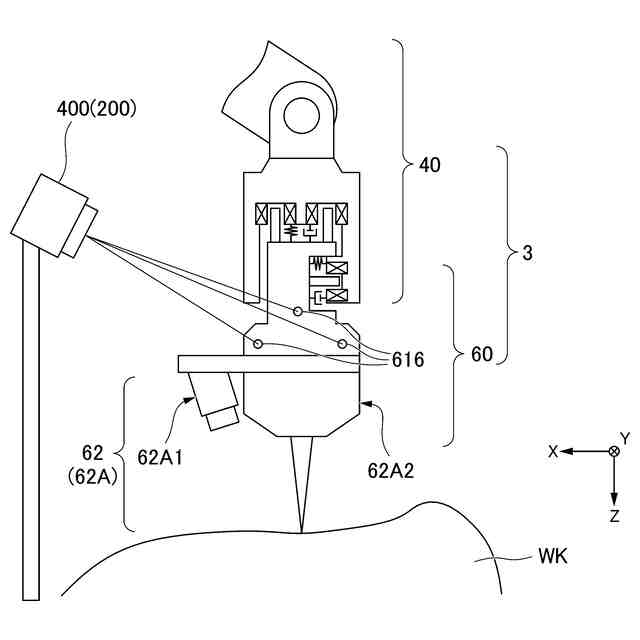
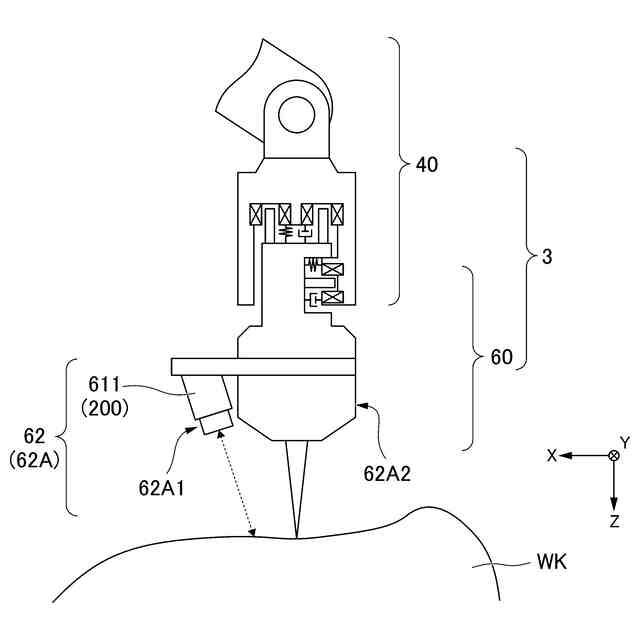
エンドエフェクタユニット3は、支持部41と、台座駆動部50と、台座部61と、エンドエフェクタ62とを備える。
なお、台座部61と、エンドエフェクタ62とを総称して台座付きエンドエフェクタ60としてもよい。また、台座付きエンドエフェクタ60のことを単にエンドエフェクタと称してもよい。
また、以下の説明では、台座部61と、エンドエフェクタ62とが別部品として構成される場合を一例として記載するが、これに限られず、台座部61と、エンドエフェクタ62とが一体的に構成されていてもよい。
また、アーム部20と、支持部41とが一体的に構成されていてもよい。以下の説明において、アーム部20と、支持部41とを総称して支持部付きアーム部40と記載する場合がある。
【0008】
検出部200は、エンドエフェクタ62の位置を検出する。また、検出部200は、エンドエフェクタ62の姿勢を検出してもよい。検出部200は、エンドエフェクタ62の位置及び姿勢を検出する。ここで、エンドエフェクタ62の位置とは、ロボットユニット2が設置された空間内におけるエンドエフェクタ62の座標である。エンドエフェクタ62の姿勢とは、ロボットユニット2が設置された空間内のある位置における、エンドエフェクタ62の向き(又は、エンドエフェクタ62の方向)である。なお、以下の説明においてエンドエフェクタ62の位置と姿勢とを区別することなく、エンドエフェクタ62の位置(又は、エンドエフェクタ62の姿勢)と記載する場合がある。
制御装置10は、ロボットユニット2が備えるアーム駆動部30を制御することにより、ロボットユニット2の位置又は姿勢又はその両方を制御する。
【0009】
本実施形態のロボットユニット2は、多関節アーム型のロボットである。一例として、ロボットユニット2は、関節によって順に接続される5つのアーム(例えば、第1アーム部21~第5アーム部25)を備える。ロボットユニット2は、5つのアームに対応する5つのアーム駆動部30(例えば、第1アーム駆動部31~第5アーム駆動部35)を備える。すなわち、ロボットユニット2は、多関節アームを含む。なお、ロボットユニット2は、多関節アーム型のロボットに限るものではなく、例えば無人航空機(Unmanned Aerial Vehicle;UAV、ドローン)、マルチコプタ等の飛翔体でもよい。
【0010】
アーム駆動部30は、一例として、サーボモータ(不図示)と、アーム位置検出部(不図示)とを備える。
第1アーム駆動部31は、サーボモータによってロボットユニット2の設置面を基準にして第1アーム部21を変位(例えば、回転)させる。第1アーム駆動部31は、第1アーム位置検出部311を備える。第1アーム位置検出部311は、ロボットユニット2の設置面を基準にした第1アーム部21の変位量(例えば、回転角度)を検出する。
第2アーム駆動部32は、サーボモータによって第1アーム部21を基準にして第2アーム部22を変位(例えば、回転)させる。第2アーム駆動部32は、第2アーム位置検出部321を備える。第2アーム位置検出部321は、第1アーム部21を基準にした第2アーム部22の変位量(例えば、回転角度)を検出する。
なお、第3アーム駆動部33~第5アーム駆動部35、及び第3アーム位置検出部331~第5アーム位置検出部351の構成は、上述と同様であるため説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社エビス
連結具
1か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動ハンマ
3か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社エビス
携帯付属物取付具
2か月前
株式会社ダイヘン
制御装置
3か月前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボット
3か月前
株式会社マキタ
ハンマドリル
1か月前
SMC株式会社
グリッパ
3か月前
川崎重工業株式会社
ロボット
1か月前
CKD株式会社
吸着型搬送装置
8日前
株式会社近藤製作所
産業用ロボットチャック
3か月前
学校法人立命館
ロボットハンド
2か月前
ジヤトコ株式会社
圧入装置
7日前
川崎重工業株式会社
塗装ロボット
15日前
株式会社安川電機
ロボット
11日前
トヨタ自動車株式会社
ロボットチャック
3か月前
株式会社安川電機
ロボット
11日前
株式会社安川電機
ロボット
11日前
長堀工業株式会社
締結装置
24日前
株式会社アイエイアイ
グリッパー
2か月前
株式会社不二越
垂直多関節ロボット
3か月前
株式会社不二越
ロボットの操作装置
1か月前
株式会社アマダ
磁気吸着装置
14日前
株式会社デンソーウェーブ
産業用ロボット
3か月前
株式会社山下工業研究所
ラチェットレンチ
1か月前
中国電力株式会社
ボルト共回り防止用工具
3か月前
工機ホールディングス株式会社
作業機
14日前
株式会社不二越
協働ロボットシステム
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
14日前
株式会社マキタ
電動作業機
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ