TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025011035
公報種別
公開特許公報(A)
公開日
2025-01-23
出願番号
2024098593
出願日
2024-06-19
発明の名称
ロボットアレイインクジェットプリンティング用のカメラ較正
出願人
ザ・ボーイング・カンパニー
,
The Boeing Company
代理人
園田・小林弁理士法人
主分類
B25J
13/08 20060101AFI20250116BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
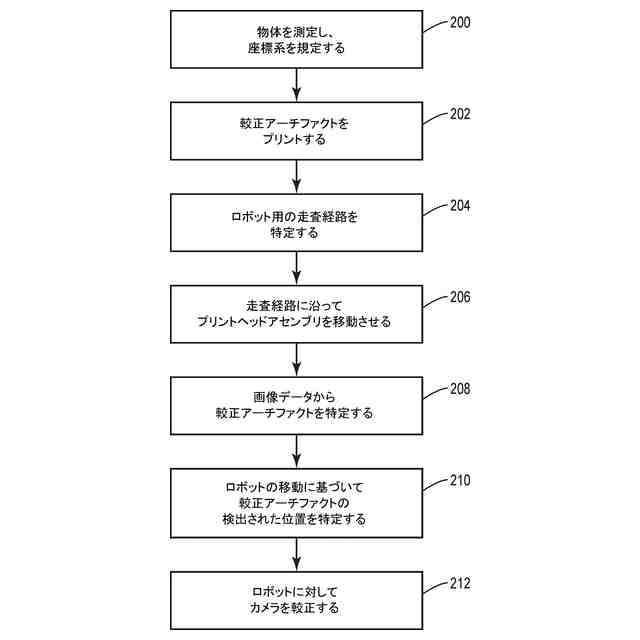
【課題】ロボットインクジェットプリンティングと共に使用されるカメラを較正する方法を対象とする。
【解決手段】本用途は、ロボットに取り付けられたプリントヘッドアセンブリでの使用を対象とする。1つの用途は、民間航空機の表面などの大きな物体にインクジェットプリントするためのシステムを提供する。この用途は、ロボットの動きに対してカメラを較正することを行う。この較正は、インクジェットシステムによって印刷された1以上の較正アーチファクトを使用して実現される。
【選択図】図5
特許請求の範囲
【請求項1】
ロボットインクジェットプリンティングと共に使用されるカメラ(30)を較正する方法であって、
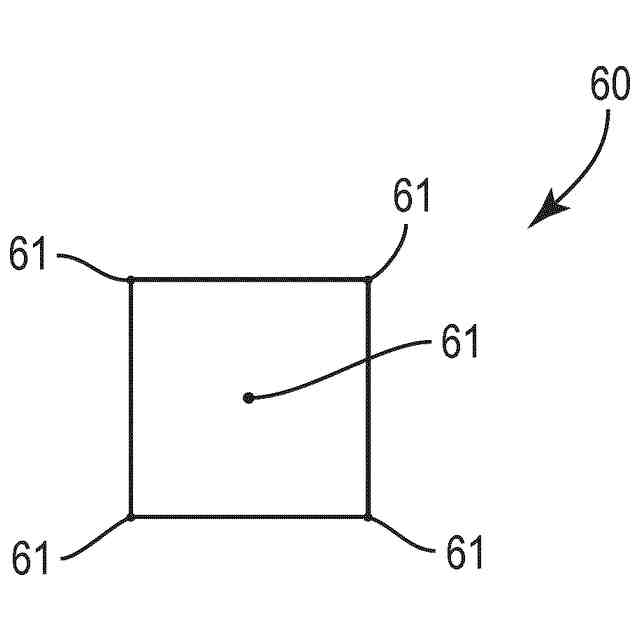
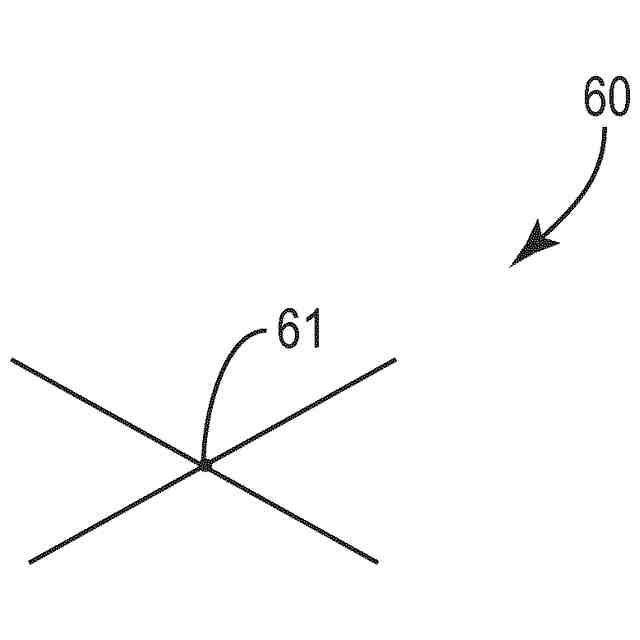
1以上の制御ポイント(61)を含む較正アーチファクト(60)をプリントすることであって、前記較正アーチファクト(60)はロボット(40)に結合されたプリントヘッドアセンブリ(20)を用いてプリントされ、前記較正アーチファクト(60)は物体(100)上の既知の位置にプリントされる、較正アーチファクト(60)をプリントすること、
前記ロボット(40)を用いて、前記プリントヘッドアセンブリ(20)に結合されたカメラ(30)を移動させ、前記較正アーチファクト(60)の画像データをキャプチャすること、
前記画像データから前記較正アーチファクト(60)を検出すること、
前記画像データがキャプチャされたときの前記ロボット(40)の位置に基づいて、前記較正アーチファクト(60)の検出された位置を特定すること、及び
前記較正アーチファクト(60)の既知の位置と前記較正アーチファクト(60)の前記検出された位置とに基づいて、前記カメラ(30)を較正することを含む、方法。
続きを表示(約 1,900 文字)
【請求項2】
前記較正アーチファクト(60)が、既知の制御ポイント位置に配置された1以上の制御ポイント(61)を含み、前記方法は、
前記カメラ(30)によってキャプチャされた前記画像データから前記制御ポイント(61)の検出された位置を特定すること、及び
前記較正アーチファクト(60)の前記制御ポイント(61)の前記位置と前記較正アーチファクト(60)の前記制御ポイント(61)の前記検出された位置とに基づいて、前記カメラ(30)を較正することを更に含む、請求項1に記載の方法。
【請求項3】
前記ロボット(40)が前記プリントヘッドアセンブリ(20)を前記物体(100)の上で移動させるための走査経路を生成すること、及び
前記ロボット(40)が前記走査経路に沿って前記プリントヘッドアセンブリ(20)を移動させている間に、前記較正アーチファクト(60)の前記画像データをキャプチャすることを更に含む、請求項1に記載の方法。
【請求項4】
前記較正アーチファクト(60)を前記既知の位置にプリントする前に、計測システム(50)を用いて前記物体(100)の表面の三次元スキャンをキャプチャすることを更に含む、請求項1に記載の方法。
【請求項5】
前記物体(100)の前記三次元スキャンに基づく計測座標系内の前記ロボット(40)の移動を特定することを更に含む、請求項1に記載の方法。
【請求項6】
前記プリントヘッドアセンブリ(20)の工具中心点(26)に基づいて、前記ロボット(40)の前記位置を特定することを更に含む、請求項1に記載の方法。
【請求項7】
前記工具中心点(26)と前記カメラ(30)との間の前記プリントヘッドアセンブリ(20)上の既知の距離に基づいて、前記カメラ(30)を較正することを更に含む、請求項6に記載の方法。
【請求項8】
前記較正アーチファクト(60)は、第1の較正アーチファクト(60)であり、前記方法は、
前記物体(100)上の既知の位置に、更なる較正アーチファクト(60)をプリントすること、
前記更なる較正アーチファクト(60)の更なる画像データをキャプチャすること、及び
前記較正アーチファクト(60)の前記既知の位置と前記較正アーチファクト(60)の前記画像データがキャプチャされたときの前記工具中心点(26)との間の差に基づいて、前記ロボット(40)に対して前記カメラ(30)を較正することを更に含む、請求項1に記載の方法。
【請求項9】
前記較正アーチファクト(60)の前記画像データをキャプチャすることは、ラインスキャンカメラ(30)を用いて前記画像データをキャプチャすることを含む、請求項1に記載の方法。
【請求項10】
ロボットインクジェットプリンティングと共に使用されるカメラ(30)を較正する方法であって、
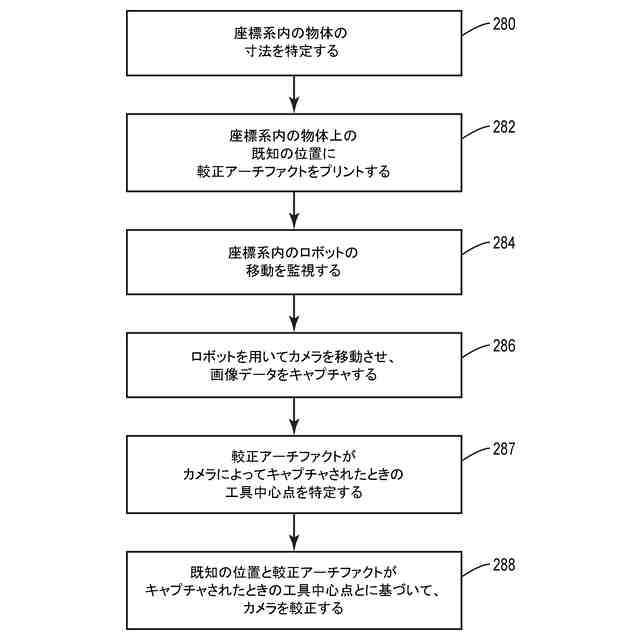
計測システム(50)によって物体(100)の三次元スキャンに基づく座標系(99)内の前記物体(100)の寸法を特定すること、
ロボット(40)に結合されたプリントヘッドアセンブリ(20)を用いて、前記物体(100)に較正アーチファクト(60)をプリントすることであって、前記較正アーチファクト(60)は前記座標系(99)内の前記物体(100)上の既知の位置にプリントされる、前記物体(100)に較正アーチファクト(60)をプリントすること、
前記ロボット(40)が前記物体(100)の上を移動している間に、前記座標系(99)内の前記ロボット(40)の動きを監視すること、
前記ロボット(40)を用いてカメラ(30)を前記物体(100)の上で移動させ、前記較正アーチファクト(60)の画像データをキャプチャすること、
前記画像データが前記カメラ(30)によってキャプチャされたときの前記ロボット(40)の位置に基づいて、前記較正アーチファクト(60)の前記画像データがキャプチャされたときの前記プリントヘッドアセンブリ(20)の工具中心点(26)の位置を特定すること、及び
前記較正アーチファクト(60)の前記既知の位置と前記較正アーチファクト(60)の前記画像データがキャプチャされたときの前記工具中心点(26)との間の差に基づいて、前記ロボット(40)に対して前記カメラ(30)を較正することを含む、方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
[0001] 本開示は、広くは、インクジェットプリンティングの分野に関し、特に、インクジェットプリンティングのエラーを検出することにおいて使用されるカメラ較正に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
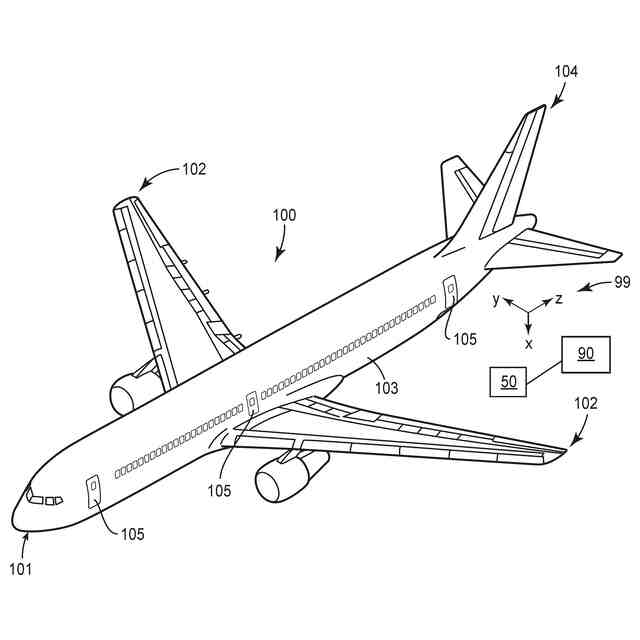
[0002] インクジェットプリンティング装置は、大きな表面にプリントするように構成され得る。プリンティングの文脈には、非限定的に、民間航空機の胴体、主翼、及び飛行操縦部材などの、様々な航空機部品へのプリンティングが含まれる。その他の文脈には、非限定的に、大きな装置部品(例えば、フレーム、ワークベッド)や産業機械が含まれる。
【0003】
[0003] インクジェットプリンティング装置は、ロボットに取り付けられたインクジェットプリントヘッドアセンブリを含む。一例では、プリントヘッドアセンブリが、幾つかの個別のプリントヘッドを有するプリントヘッドハウジングを含む。各インクジェットプリントヘッドは、シアン、イエロー、マゼンタ、及びブラックなどの、異なる色のインクを吐出する。プリントヘッドは、ロボットがプリンティング中に表面にわたりプリントヘッドアセンブリを移動させるときに制御される。
【0004】
[0004] 大きなスケールのインクジェットプリンティングの問題は、プリントされる表面の一部分又は全体にわたり延在するようにサイズ決定される大きなロボットの必要性である。プリントヘッドアセンブリは、ロボットの一端に取り付けられ、そのサイズの結果として高い動的な荷重を受ける。インクジェットプリンティングは、目に見える欠陥が生じる前に、インク付加における誤差の許容範囲が非常に小さい。カメラを使用して、インクジェットプリンティングを監視し、目に見える誤差を検出する。カメラは、目に見えるプリンティング欠陥を最小限に抑えるために、局所的な低遅延の視覚的監視を提供するように較正されるべきである。カメラは、非限定的に、インク付加の重複パス間のノズル停止やモーションシステムのエラーなどの、インクジェットプリンティングにおける様々なエラーを特定するように構成されるべきである。
【発明の概要】
【0005】
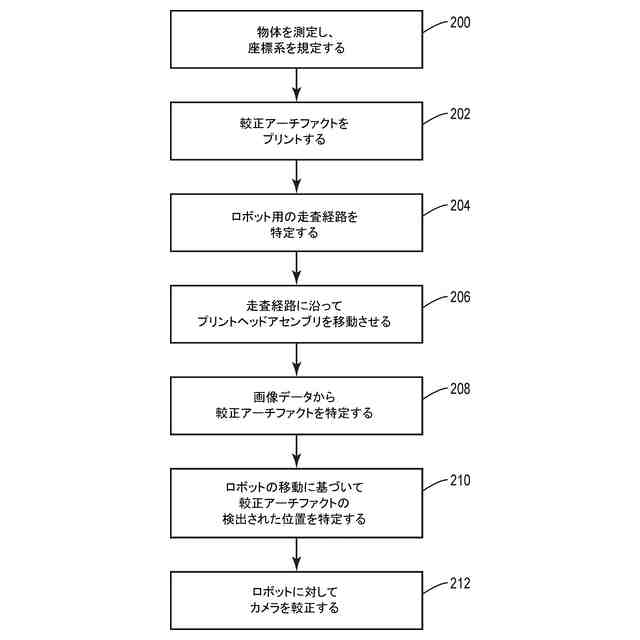
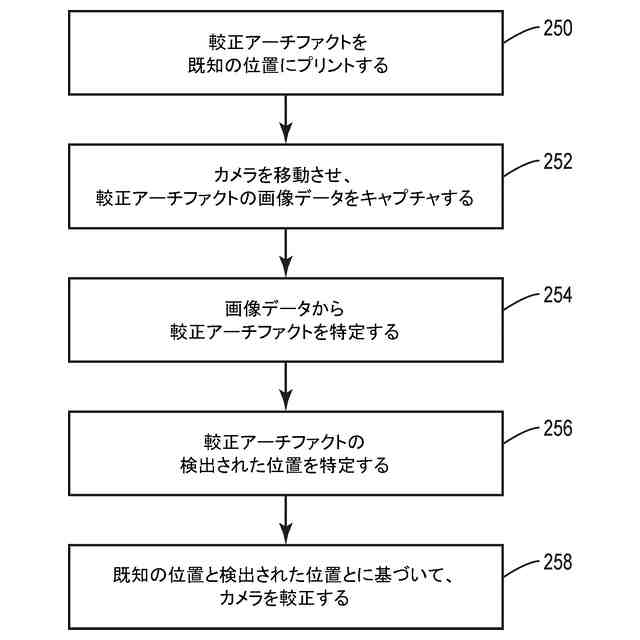
[0005] 一態様は、ロボットインクジェットプリンティングと共に使用されるカメラを較正する方法を対象とする。該方法は、1以上の制御ポイントを含む較正アーチファクトをプリントすることであって、較正アーチファクトはロボットに結合されたプリントヘッドアセンブリを用いてプリントされ、較正アーチファクトは物体上の既知の位置にプリントされる、較正アーチファクトをプリントすること、ロボットを用いて、プリントヘッドアセンブリに結合されたカメラを移動させ、較正アーチファクトの画像データをキャプチャすること、画像データから較正アーチファクトを検出すること、画像データがキャプチャされたときのロボットの位置に基づいて、較正アーチファクトの検出された位置を特定すること、及び、較正アーチファクトの既知の位置と較正アーチファクトの検出された位置とに基づいて、カメラを較正することを含む。
【0006】
[0006] 別の一態様では、較正アーチファクトが、既知の制御ポイント位置に配置された1以上の制御ポイントを含み、該方法は、カメラによってキャプチャされた画像データから制御ポイントの検出された位置を特定すること、及び、較正アーチファクトの既知の制御ポイント位置と較正アーチファクトの制御ポイントの検出された位置とに基づいて、カメラを較正することを更に含む。
【0007】
[0007] 別の一態様では、該方法が、ロボットがプリントヘッドアセンブリを物体の上で移動させるための走査経路を生成すること、及び、ロボットが走査経路に沿ってプリントヘッドアセンブリを移動させている間に、較正アーチファクトの画像データをキャプチャすることを更に含む。
【0008】
[0008] 別の一態様では、該方法が、較正アーチファクトを既知の位置にプリントする前に、計測システムを用いて物体の表面の三次元スキャンをキャプチャすることを更に含む。
【0009】
[0009] 別の一態様では、該方法が、物体の三次元スキャンに基づく計測座標系内のロボットの移動を特定することを更に含む。
【0010】
[0010] 別の一態様では、該方法が、プリントヘッドアセンブリの工具中心点に基づいて、ロボットの位置を特定することを更に含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社マキタ
電動工具
4日前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
電動ハンマ
3か月前
株式会社ダイヘン
制御装置
3か月前
株式会社エビス
携帯付属物取付具
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボットアーム
4日前
川崎重工業株式会社
ロボット
3か月前
川崎重工業株式会社
ロボットアーム
4日前
川崎重工業株式会社
ロボットリスト
4日前
SMC株式会社
グリッパ
3か月前
日本車輌製造株式会社
締め付け工具
4日前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボットシステム
4日前
株式会社近藤製作所
産業用ロボットチャック
3か月前
CKD株式会社
吸着型搬送装置
18日前
学校法人立命館
ロボットハンド
2か月前
長堀工業株式会社
締結装置
1か月前
株式会社安川電機
ロボット
21日前
株式会社安川電機
ロボット
21日前
トヨタ自動車株式会社
ロボットチャック
3か月前
株式会社アイエイアイ
グリッパー
2か月前
川崎重工業株式会社
塗装ロボット
25日前
ジヤトコ株式会社
圧入装置
17日前
株式会社安川電機
ロボット
21日前
株式会社アマダ
磁気吸着装置
24日前
株式会社不二越
ロボットの操作装置
2か月前
中国電力株式会社
ボルト共回り防止用工具
3か月前
株式会社不二越
垂直多関節ロボット
3か月前
株式会社山下工業研究所
ラチェットレンチ
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ