TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025009707
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023198740
出願日
2023-11-24
発明の名称
通路監視制御方法、装置、デバイス、記憶媒体及びプログラム
出願人
チョーチアン ヘンイー ペトロケミカル カンパニー,リミテッド
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/633 20240101AFI20250109BHJP(制御;調整)
要約
【課題】巻糸パッケージ生産作業場における通路監視制御方法を提供する。
【解決手段】方法は、巻糸パッケージ生産作業場において巻糸パッケージを搬送するために使用する必要があるAGVの車体周辺領域内で収集された走査データを取得することと
、複数のカメラのうちの1つにより、複数の監視制御対象通路のうちのいずれかの監視制御対象通路の少なくとも一部の領域に対してビデオ収集を行うことと、車体収集アセンブリによって収集された走査データ及び/又はカメラによって収集されたビデオデータに基づいて目標体が存在すると判定した場合、目標体が位置する目標通路を取得することと、目標体が位置する目標通路の目標予警報情報を生成することと、を含む。
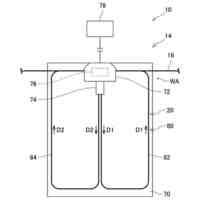
【選択図】図1
特許請求の範囲
【請求項1】
無人搬送車AGVの車体収集アセンブリによって車体周辺領域内で収集された走査データを取得することであって、前記AGVは複数のAGVのうちの1つであり、前記複数のAGVにおけるAGVは複数の監視制御対象通路のうちのいずれかの監視制御対象通路を走行し、前記複数の監視制御対象通路は巻糸パッケージ生産作業場において巻糸パッケージを搬送するために使用する必要がある複数の通路であり、前記車体周辺領域は前記AGVが走行する監視制御対象通路の少なくとも一部の領域を含む、ことと、
カメラによってビデオ収集領域内で収集されたビデオデータを取得することであって、前記カメラは、複数のカメラのうちの1つであり、前記複数の監視制御対象通路のうちのいずれかの監視制御対象通路の少なくとも一部の領域に対してビデオ収集を行うことに用いられ、前記ビデオ収集領域は前記カメラが収集可能な監視制御対象通路の少なくとも一部の領域を含む、ことと、
前記車体収集アセンブリによって収集された走査データ及び/又は前記カメラによって収集されたビデオデータに基づいて目標体が存在すると判定した場合、前記目標体が位置する目標通路を取得し、前記目標通路は前記複数の監視制御対象通路のうちの1つである、ことと、
前記目標体が位置する目標通路の目標予警報情報を生成することと、を含む、
通路監視制御方法。
続きを表示(約 3,200 文字)
【請求項2】
前記車体収集アセンブリによって収集された走査データ及び/又は前記カメラによって収集されたビデオデータに基づいて目標体が存在すると判定した場合、前記目標体が位置する目標通路を取得し、前記目標体が位置する目標通路の目標予警報情報を生成することは、
前記車体収集アセンブリによって収集された走査データに基づいて、走査データに目標体が存在すると判定した場合、走査データにおいて目標体が位置する目標通路を取得し、走査データにおいて目標体が位置する目標通路の走査予警報情報を生成することと、
前記カメラによって収集されたビデオデータに基づいて、ビデオデータに目標体が存在すると判定した場合、ビデオデータにおいて目標体が位置する目標通路を取得し、ビデオデータにおいて目標体が位置する目標通路のビデオ予警報情報を生成することと、
前記車体収集アセンブリによって収集された走査データに基づいて、走査データに目標体が存在すると判定した場合、走査データにおいて目標体が位置する目標通路を取得し、前記カメラによって収集されたビデオデータに基づいて、ビデオデータに目標体が存在すると判定した場合、ビデオデータにおいて目標体が位置する目標通路を取得し、走査データにより取得された目標体が位置する目標通路と、前記ビデオデータにより取得された目標体が位置する目標通路とは同じであると判定した場合、目標通路に対する混合予警報情報を生成することと、
のいずれか1つを含む、
請求項1に記載の通路監視制御方法。
【請求項3】
前記混合予警報情報、走査予警報情報、及びビデオ予警報情報は、三者の優先度が次第に低くなる、
請求項2に記載の通路監視制御方法。
【請求項4】
前記通路監視制御方法は、
前記車体収集アセンブリによって収集された走査データに含まれる走査画像を第1検出モデルに入力して、第1検出結果を得ることであって、前記第1検出モデルは画像に目標体の少なくとも一部の局所特徴が存在するか否かを識別することに用いられ、前記第1検出結果は走査データに含まれる走査画像に目標体が存在するか否かを表す、ことをさらに含む、
請求項2に記載の通路監視制御方法。
【請求項5】
前記車体収集アセンブリによって収集された走査データに含まれる走査画像を第1検出モデルに入力して、第1検出結果を得ることは、
走査画像におけるエッジ領域を除去し、走査画像におけるコア領域に対応するサブ画像を得るように、前記車体収集アセンブリによって収集された走査データに含まれる走査画像に対して前処理を行うことと、
走査画像におけるコア領域に対応するサブ画像を第1検出モデルに入力して、第1検出結果を得ることと、を含み、
ここで、前記第1検出モデルは、走査画像におけるコア領域に対応するサブ画像に対して特徴抽出を行って、コア領域の特徴マップを得、コア領域の特徴マップに目標体の少なくとも一部の局所特徴が存在するか否かを検出することに用いられる、
請求項4に記載の通路監視制御方法。
【請求項6】
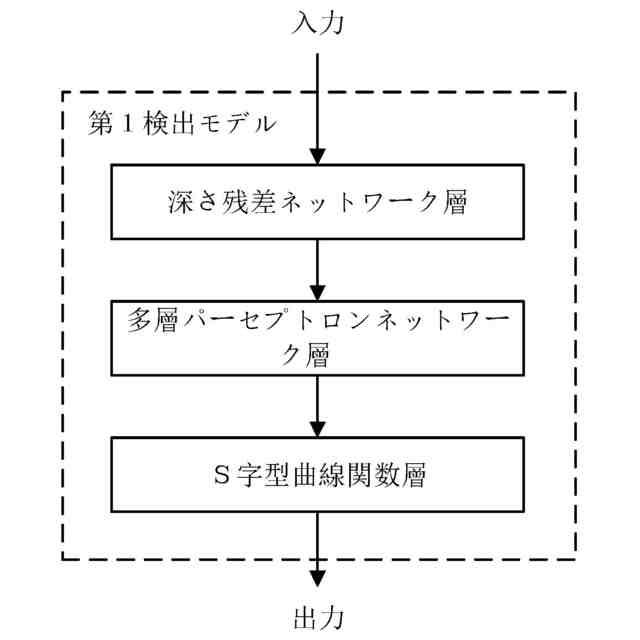
前記第1検出モデルは少なくとも第1ネットワーク層、第2ネットワーク層、及び第3ネットワーク層を含み、
前記第1ネットワーク層は、サブ画像に対応する少なくとも1つの特徴マップを得るように、コア領域に対応するサブ画像に対して特徴抽出を行うことに用いられ、ここで、少なくとも1つの特徴マップにおける特徴マップの数は、特徴マップの特徴ブロックのサイズと負の相関があり、
前記第2ネットワーク層は、サブ画像に対応する少なくとも1つの特徴マップに基づいて、目標体の少なくとも一部の局所特徴が存在するか否かを予測し、確率値を得ることに用いられ、
前記第3ネットワーク層は、確率値を処理し、目標体の少なくとも一部の局所特徴が存在することを表すための第1値、又は目標体の少なくとも一部の局所特徴が存在しないことを表すための第2値を得、前記第1検出結果は前記第1値又は第2値であることに用いられる、
請求項5に記載の通路監視制御方法。
【請求項7】
前記通路監視制御方法は、
前記カメラによって収集されたビデオデータを第2検出モデルに入力して、第2検出結果を得ることをさらに含み、ここで、前記第2検出モデルはビデオデータに目標体が存在するか否かを識別することに用いられ、前記第2検出結果はビデオデータに目標体が存在するか否かを表し、前記第2検出モデルの時間複雑度は前記第1検出モデルの時間複雑度より大きい、
請求項4に記載の通路監視制御方法。
【請求項8】
前記カメラによって収集されたビデオデータを第2検出モデルに入力して、第2検出結果を得ることは、
ビデオ画像セットを得るように、前記カメラによって収集されたビデオデータに対して前処理を行うことであって、前記ビデオ画像セットは少なくとも1組の隣接する2フレームのビデオ画像を含み、前記隣接する2フレームのビデオ画像は、隣接する2フレームのビデオ画像の特徴マップ間の差異値は予め設定された差異値より大きい要件を満たす、ことと、
前記ビデオ画像セットにおける各ビデオ画像を第2検出モデルに入力して、ビデオ画像に対応するサブ結果を得ることと、
前記ビデオ画像セットの全てのビデオ画像のサブ結果のうち、少なくとも1つのサブ結果が、目標体が存在することを表すための第3値である場合、前記第3値を第2検出結果とし、あるいは、前記ビデオ画像セットの各ビデオ画像のサブ結果がいずれも、目標体が存在しないことを表すための第4値である場合、前記第4値を第2検出結果とすることと、を含む、
請求項7に記載の通路監視制御方法。
【請求項9】
前記第2検出モデルは少なくとも第4ネットワーク層、第5ネットワーク層、及び第6ネットワーク層を含み、
前記第4ネットワーク層は順に接続された少なくとも2つの緻密層を含み、ここで、直前の緻密層により得られた接続特徴マップは、次の緻密層の初期特徴マップとなり、前記2つの緻密層における緻密層は、初期特徴マップに対して畳み込み処理を行って、畳み込み特徴マップを得、初期特徴マップと畳み込み特徴マップとに対して接続処理を行って、接続特徴マップを得ることに用いられ、前記少なくとも2つの緻密層における最初の緻密層の初期特徴マップはビデオ画像に基づいて得られ、
前記第5ネットワーク層は前記少なくとも2つの緻密層における最後の緻密層により得られた接続特徴マップに対して特徴集約を行って、目標特徴マップを得ることに用いられ、
前記第6ネットワーク層は前記目標特徴マップに対して予測を行って、前記第3値又は前記第4値を得ることに用いられる、
請求項8に記載の通路監視制御方法。
【請求項10】
前記通路監視制御方法は、ビデオデータにおいて目標体が位置する目標通路を取得した後、
前記目標通路にAGVが走行しているか否かを判定することをさらに含み、
ここで、前記ビデオデータにおいて目標体が位置する目標通路のビデオ予警報情報を生成することは、
AGVが走行していると判定した場合、ビデオデータにおいて目標体が位置する目標通路のビデオ予警報情報を生成することを含む、
請求項2に記載の通路監視制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、データ処理技術分野に関し、特に通路監視制御方法、装置、デバイス、記憶媒体及びプログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
巻糸パッケージ生産作業場において、無人搬送車(Automated Guided Vehicle、AGV)は重要な輸送手段であり、一般的に、無人搬送車両は所定の経路に従って走行し、該経路に作業員が現れると、安全事故、ひいては人員の死傷を引き起こす恐れがあり、従って、上記問題を効果的に解決するため、効果的な監視制御方法が必要となる。
【発明の概要】
【発明が解決しようとする課題】
【0003】
本開示は、従来技術における1つ又は複数の技術的問題を解決又は緩和するために、通路監視制御方法、装置、デバイス、記憶媒体及びプログラムを提供する。
【課題を解決するための手段】
【0004】
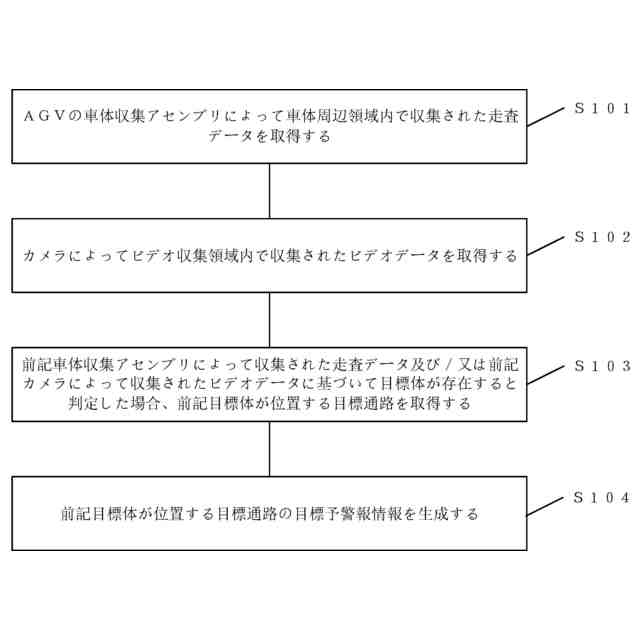
第1態様では、本開示は通路監視制御方法を提供し、当該方法は、
無人搬送車AGVの車体収集アセンブリによって車体周辺領域内で収集された走査データを取得することであって、前記AGVは複数のAGVのうちの1つであり、前記複数のAGVにおけるAGVは複数の監視制御対象通路のうちのいずれかの監視制御対象通路を走行し、前記複数の監視制御対象通路は巻糸パッケージ生産作業場において巻糸パッケージを搬送するために使用する必要がある複数の通路であり、前記車体周辺領域は前記AGVが走行する監視制御対象通路の少なくとも一部の領域を含む、ことと、
カメラによってビデオ収集領域内で収集されたビデオデータを取得することであって、前記カメラは、複数のカメラのうちの1つであり、前記複数の監視制御対象通路のうちのいずれかの監視制御対象通路の少なくとも一部の領域に対してビデオ収集を行うことに用いられ、前記ビデオ収集領域は前記カメラが収集可能な監視制御対象通路の少なくとも一部の領域を含む、ことと、
前記車体収集アセンブリによって収集された走査データ及び/又は前記カメラによって収集されたビデオデータに基づいて目標体が存在すると判定した場合、前記目標体が位置する目標通路を取得し、前記目標通路は前記複数の監視制御対象通路のうちの1つである、ことと、
前記目標体が位置する目標通路の目標予警報情報を生成することと、を含む。
【0005】
第2態様では、本開示は通路監視制御装置を提供し、当該装置は、
無人搬送車AGVの車体収集アセンブリによって車体周辺領域内で収集された走査データを取得し、カメラによってビデオ収集領域内で収集されたビデオデータを取得するための取得ユニットであって、前記AGVは複数のAGVのうちの1つであり、前記複数のAGVにおけるAGVは複数の監視制御対象通路のうちのいずれかの監視制御対象通路を走行し、前記複数の監視制御対象通路は巻糸パッケージ生産作業場において巻糸パッケージを搬送するために使用する必要がある複数の通路であり、前記車体周辺領域は前記AGVが走行する監視制御対象通路の少なくとも一部の領域を含み、前記カメラは、複数のカメラのうちの1つであり、前記複数の監視制御対象通路のうちのいずれかの監視制御対象通路の少なくとも一部の領域に対してビデオ収集を行うことに用いられ、前記ビデオ収集領域は前記カメラが収集可能な監視制御対象通路の少なくとも一部の領域を含む、取得ユニットと、
前記車体収集アセンブリによって収集された走査データ及び/又は前記カメラによって収集されたビデオデータに基づいて目標体が存在すると判定した場合、前記複数の監視制御対象通路のうちの1つであって、前記目標体が位置する目標通路を取得し、前記目標体が位置する目標通路の目標予警報情報を生成するための処理ユニットと、を備える。
【0006】
第3態様では、本開示は電子デバイスを提供し、該デバイスは、
少なくとも1つのプロセッサと、
該少なくとも1つのプロセッサと通信接続されるメモリと、を備え、
該メモリには、該少なくとも1つのプロセッサで実行可能な命令が記憶され、該命令は、該少なくとも1つのプロセッサによって実行されると、本開示の実施例におけるいずれか1つの方法を実行させる。
【0007】
第4態様では、本開示の実施例におけるいずれか1つの方法をコンピュータに実行させるためのコンピュータ命令を記憶した非一時的コンピュータ可読記憶媒体を提供する。
第5態様では、プロセッサにより実行されると、本開示の実施例におけるいずれか1つの方法を実現するためのプログラムを提供する。
【0008】
このように、本開示の方案によれば、取得された走査データ及び/又はビデオデータを検出することができ、これにより、予警報情報への応答効率を効果的に向上させると共に、異なる粒度の監視制御データによって、トラブルシューティングの効率を効果的に向上させるための基礎を築く。
【0009】
ここに記載された内容は、本開示の実施例のキーポイント又は重要な特徴を記述することを意図せず、また、本開示の範囲を制限することにも用いられないことを理解すべきである。本開示の他の特徴については、下記の明細書を通して理解を促す。
【図面の簡単な説明】
【0010】
添付の図面において、別段説明がない限り、複数の図面を通して同一の番号は同一又は類似の部品又は要素を表す。これらの添付図面は、必ずしも縮尺通りに描かれていない。これらの図面は、本開示により提供されるいくつかの実施形態のみを示し、本開示の範囲を限定するものと見なされるべきではないことを理解されたい。
本開示の一実施例による通路監視制御方法の概略フローチャートその一である。
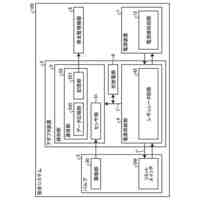
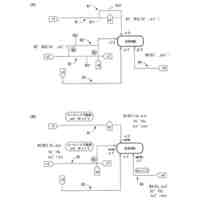
本開示の一実施例による第1検出モデルの構成を示す概略図である。
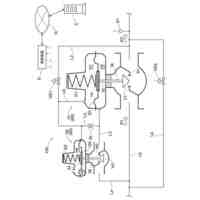
本開示の一実施例による2つの緻密層を含む第4ネットワーク層の構成を示す概略図である。
本開示の一実施例による第2検出モデルの構成を示す概略図である。
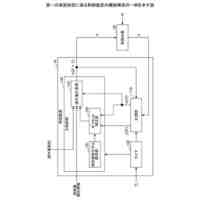
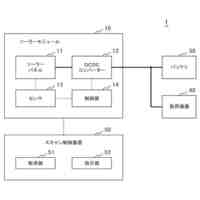
本開示の一実施例による通路監視制御装置の構成を示す概略図である。
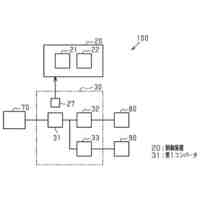
本開示の実施例による通路監視制御方法の電子デバイスのブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
1か月前
アズビル株式会社
制御装置
1か月前
コフロック株式会社
流量制御装置
1か月前
スター精密株式会社
工作機械
1日前
株式会社丸和製作所
入力機器
1か月前
株式会社豊田自動織機
荷役車両
27日前
株式会社フジキン
流量制御装置
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社村田製作所
温度補償回路
1か月前
株式会社シンテックホズミ
搬送ロボット
16日前
株式会社ダイフク
物品搬送設備
1か月前
国立大学法人広島大学
モデル誤差抑制補償器
6日前
株式会社ダイフク
物品搬送設備
20日前
株式会社ダイフク
物品搬送設備
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
トヨタ自動車株式会社
自律走行装置
6日前
日本精工株式会社
制御システムおよび制御方法
6日前
ミツミ電機株式会社
電源回路及びその起動方法
6日前
ローム株式会社
半導体装置
6日前
ブラザー工業株式会社
調整方法及び数値制御装置
28日前
ローム株式会社
定電圧生成回路
20日前
株式会社FUJI
工作機械
1か月前
株式会社シマノ
人力駆動車の操作装置
27日前
株式会社マキタ
作業ロボット
1か月前
株式会社マキタ
作業ロボット
今日
アズビル株式会社
保全システム
27日前
株式会社エイトノット
情報処理システム
10日前
株式会社デジタルカレッジKAGA
物体搬送システム
20日前
株式会社クボタ
フロントローダの操作機構及び作業車両
24日前
トヨタ自動車株式会社
ソーラー発電システムの制御装置
今日
トヨタ自動車株式会社
管理システム
20日前
大阪瓦斯株式会社
二次圧制御機構、及び制御方法
13日前
株式会社マキタ
自律移動システム
今日
富士電機株式会社
制御装置、制御方法、及びプログラム
14日前
トヨタ自動車株式会社
スキャン制御装置
1か月前
ローム株式会社
電源制御装置、電源装置
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ