TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025008242
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023110229
出願日
2023-07-04
発明の名称
ピッキングシステム、ピッキング方法およびプログラム
出願人
三菱電機株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250109BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数種類のワークを好適にピッキングおよびキッティングする。
【解決手段】ピッキングシステムは、複数種類のワークをピッキングおよびキッティングするピッキングシステムであって、ばら積みされたワークを把持する把持部を有し、ピッキングおよびキッティングを行うピッキングハンドと、ワークを撮像する撮像部と、撮像された画像からワークの形状を識別することにより、把持部による前記ワークの把持位置およびキッティング時の姿勢を判別し、把持部にワークを把持位置で把持させ、ピッキングハンドにワークをキッティング時の姿勢でキッティングさせるように制御する制御部と、を備える。
【選択図】図9
特許請求の範囲
【請求項1】
複数種類のワークをピッキングおよびキッティングするピッキングシステムであって、
ばら積みされた前記ワークを把持する把持部を有し、ピッキングおよびキッティングを行うピッキングハンドと、
前記ワークを撮像する撮像部と、
撮像された画像から前記ワークの形状を識別することにより、前記把持部による前記ワークの把持位置およびキッティング時の姿勢を判別し、前記把持部に前記ワークを前記把持位置で把持させ、前記ピッキングハンドに前記ワークを前記キッティング時の姿勢でキッティングさせるように制御する制御部と、
を備える、
ピッキングシステム。
続きを表示(約 1,400 文字)
【請求項2】
搬送装置をさらに備え、
前記ワークは、種類別に容器にばら積みされ、
前記容器は、前記搬送装置に載置され、
ピッキングおよびキッティング対象の前記ワークの種類の変更時には、前記制御部は、前記搬送装置を作動させることにより、前記ピッキングハンドがピッキングおよびキッティングを行う前記ワークを変更し、前記ワークの種類に応じた前記把持部による前記ワークの前記把持位置および前記キッティング時の姿勢を判別し、前記把持部に前記ワークを前記把持位置で把持させ、前記ピッキングハンドに前記ワークを前記キッティング時の姿勢でキッティングさせるように制御する、
請求項1に記載のピッキングシステム。
【請求項3】
前記制御部は、前記撮像された画像から前記ワークの種類を識別し、前記ワークの種類に応じた前記把持部による前記ワークの前記把持位置および前記キッティング時の姿勢を判別し、前記把持部に前記ワークを前記把持位置で把持させ、前記ピッキングハンドに前記ワークを前記キッティング時の姿勢でキッティングさせるように制御する、
請求項1に記載のピッキングシステム。
【請求項4】
ピッキングされた前記ワークの把持位置および姿勢を変更する姿勢変更装置をさらに備え、
前記姿勢変更装置は、前記ピッキングハンドから前記ワークを受け取った後に前記ワークの姿勢を変更し、再度前記ピッキングハンドに前記ワークを受け渡す、
請求項1に記載のピッキングシステム。
【請求項5】
前記把持部は、複数の把持爪により前記ワークを把持し、
前記ワークの把持位置に応じて、把持爪同士の間隔を調整する、
請求項1に記載のピッキングシステム。
【請求項6】
前記ワークを振動させることにより、ばら積みされた前記ワークの姿勢を変化させる振動発生装置をさらに備える、
請求項1に記載のピッキングシステム。
【請求項7】
前記撮像部は、前記ばら積みされたワークに近づく方向に移動させることができ、
前記ピッキングハンドが予め設定された回数以内で前記ワークをピッキングできなかった場合、前記撮像部を前記ばら積みされたワークに近づく方向に移動させる、
請求項1に記載のピッキングシステム。
【請求項8】
複数種類のワークをピッキングおよびキッティングするピッキング方法であって、
ばら積みされた前記ワークを撮像し、
撮像された画像から前記ワークの形状を識別することにより、ピッキングハンドの把持部による前記ワークの把持位置およびキッティング時の姿勢を判別し、
前記把持部に前記ワークを前記把持位置で把持させ、前記ピッキングハンドに前記ワークを前記キッティング時の姿勢でキッティングさせる、
ピッキング方法。
【請求項9】
コンピュータに、
ばら積みされたワークを撮像し、
撮像された画像から前記ワークの形状を識別することにより、ピッキングハンドの把持部による前記ワークの把持位置およびキッティング時の姿勢を判別し、
前記把持部に前記ワークを前記把持位置で把持させ、前記ピッキングハンドに前記ワークを前記キッティング時の姿勢でキッティングさせる、
処理を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ピッキングシステム、ピッキング方法およびプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、多様化する市場のニーズに合わせて変種変量生産に対応できる部品供給システムが求められている。これに対応して、ばら積みされたワークをビジョンセンサで認識し、ロボットでワークを取り出すピッキングシステムの開発が広く進められている。
【0003】
例えば、特許文献1には、ばら積みされたワークから、指定された個数のワークをロボットハンドの指を用いてピッキングおよびキッティングするロボットシステムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-45771号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載のロボットシステムは、単一種類のワークの個数のみを管理するので、複数種類のワークをピッキングおよびキッティングする場合に使用することはできない。また、このロボットシステムは、撮像部によりワークの存在する場所を特定するが、ワークの位置、姿勢を特定せずにロボットハンドの指を用いてワークを持とうと試みるので、ワークを持つのに失敗するおそれがある。
【0006】
本開示は、上記実情に鑑みてなされたものであり、複数種類のワークをピッキングおよびキッティングするのに好適なピッキングシステム、ピッキング方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本開示に係るピッキングシステムは、複数種類のワークをピッキングおよびキッティングするピッキングシステムであって、ばら積みされたワークを把持する把持部を有し、ピッキングおよびキッティングを行うピッキングハンドと、ワークを撮像する撮像部と、撮像された画像からワークの形状を識別することにより、把持部によるワークの把持位置およびキッティング時の姿勢を判別し、把持部にワークを把持位置で把持させ、ピッキングハンドにワークをキッティング時の姿勢でキッティングさせるように制御する制御部と、を備える。
【発明の効果】
【0008】
本開示によれば、撮像された画像からワークの形状を識別することにより、把持部によるワークの把持位置およびキッティング時の姿勢を判別し、把持部にワークを把持位置で把持させ、ピッキングハンドにワークをキッティング時の姿勢でキッティングさせるように制御することができる。従って、複数種類のワークをピッキングおよびキッティングするのに好適なピッキングシステム、ピッキング方法およびプログラムを提供することができる。
【図面の簡単な説明】
【0009】
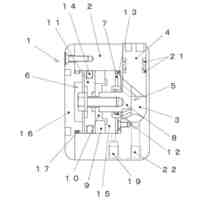
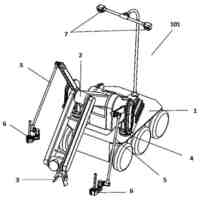
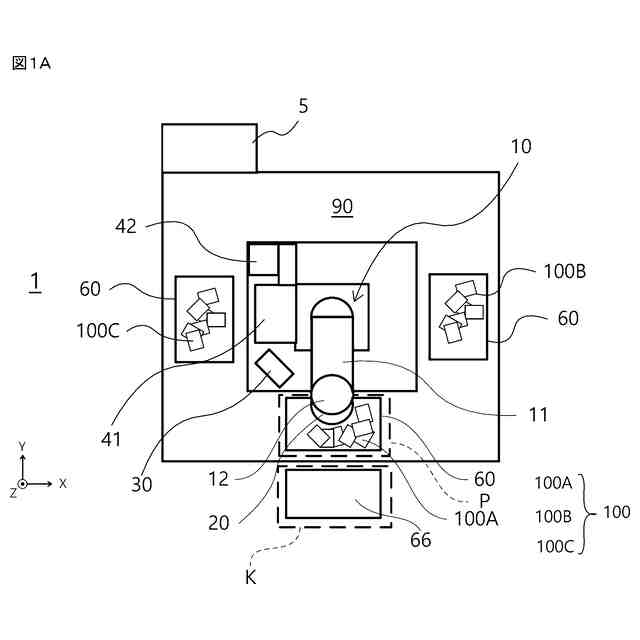
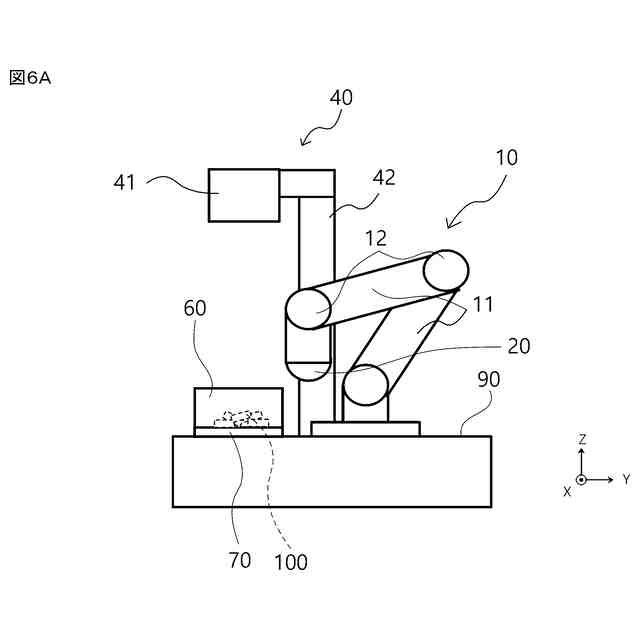
本開示の実施の形態1に係るピッキングシステムのピッキング時の様子を説明する平面図
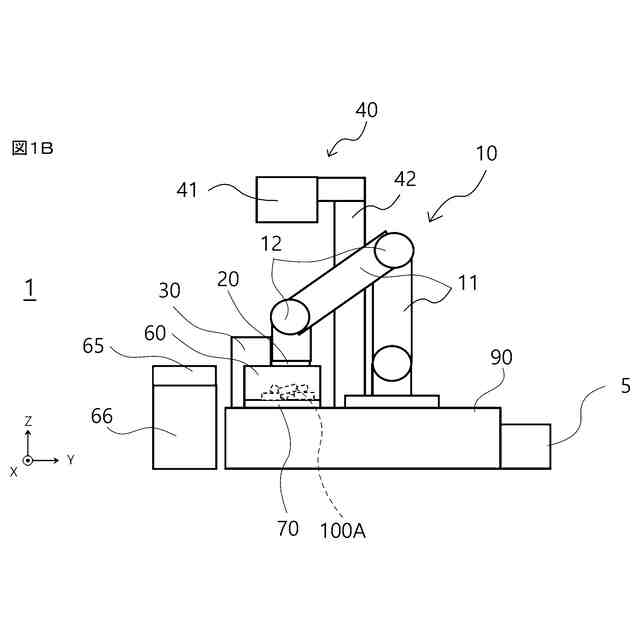
図1Aの側面図
実施の形態1に係るピッキングシステムのキッティング時の様子を説明する平面図
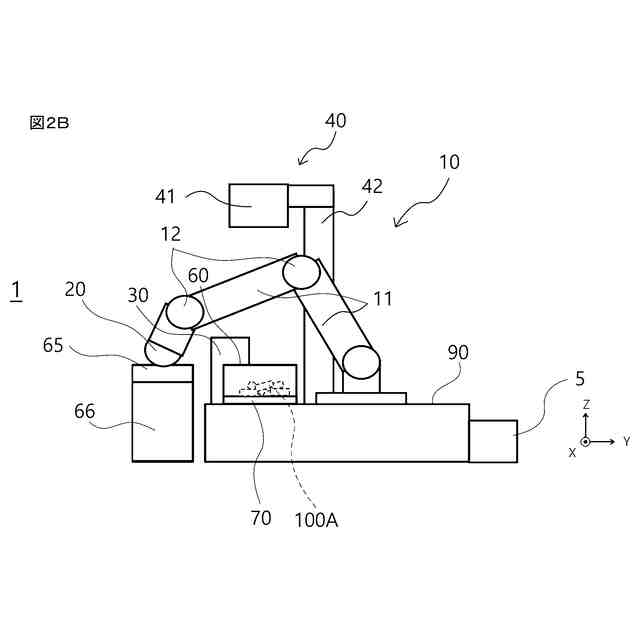
図2Aの側面図
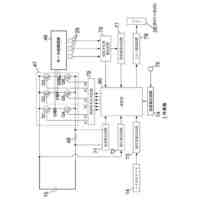
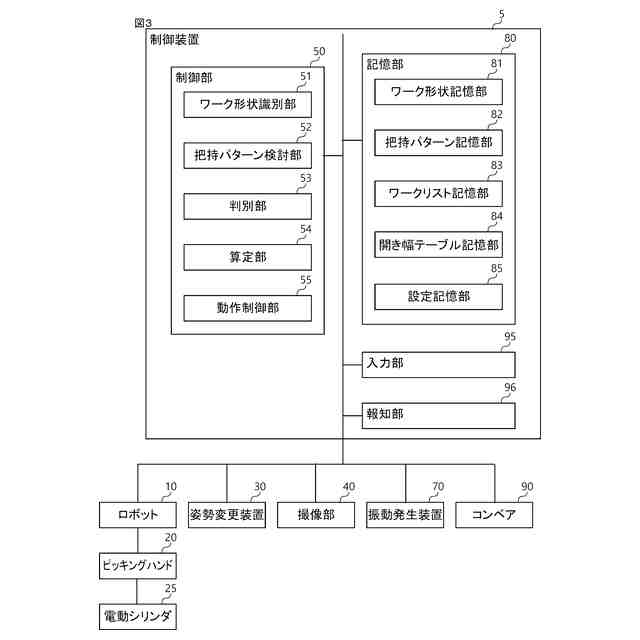
実施の形態1に係るピッキングシステムのブロック図
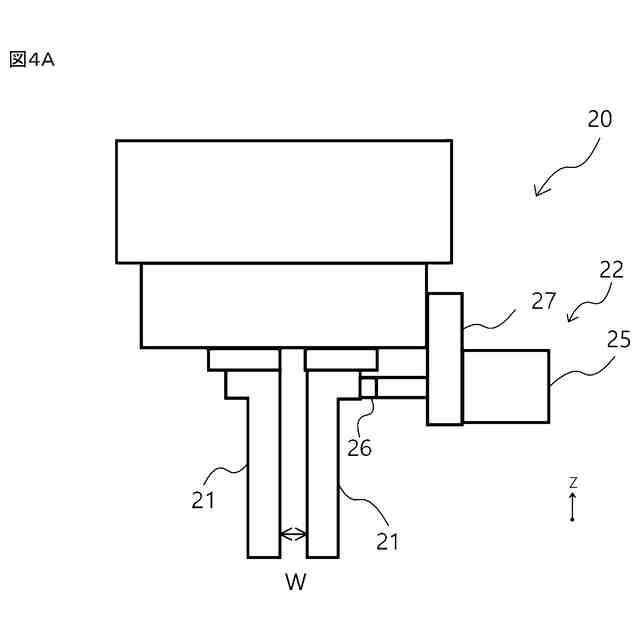
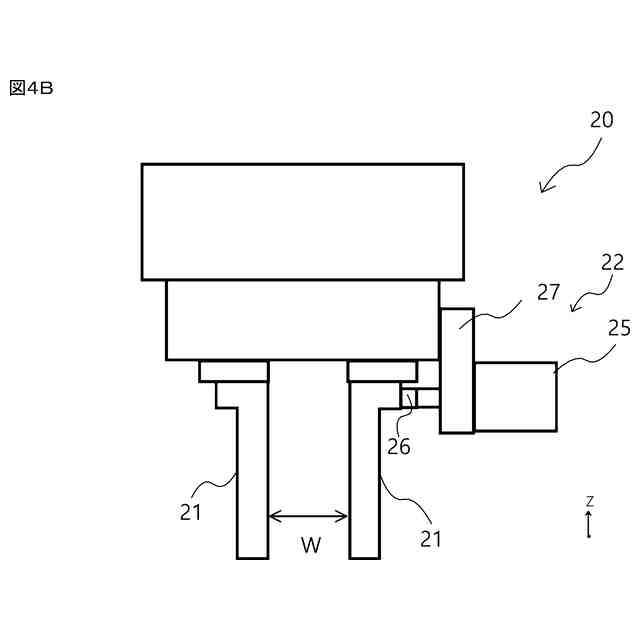
実施の形態1に係るピッキングハンドの把持部が閉じた状態の正面図
実施の形態1に係るピッキングハンドの把持部が開いた状態の正面図
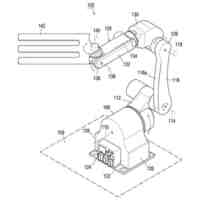
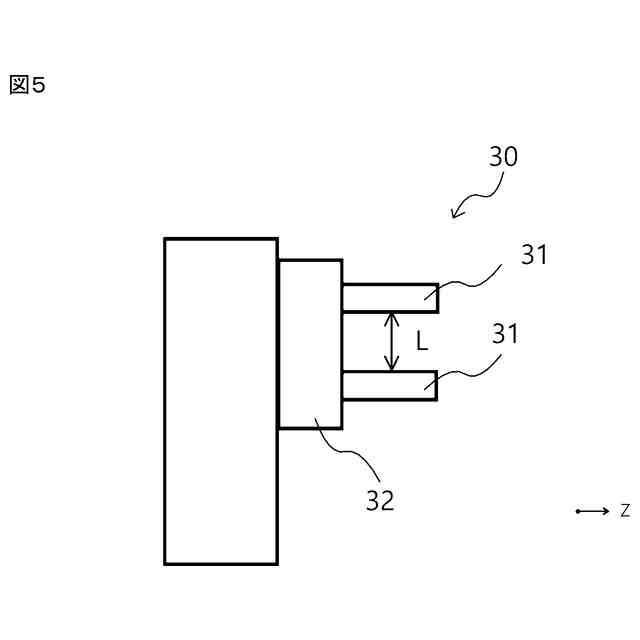
実施の形態1に係る姿勢変更装置の正面図
実施の形態1に係る三次元ビジョンセンサの初期位置を示す正面図
実施の形態1に係る三次元ビジョンセンサが下方に移動した状態を示す正面図
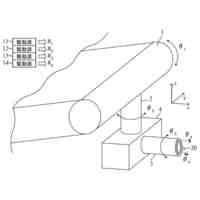
実施の形態1に係るワークリストの一例を説明する図
実施の形態1に係るメインフロー1のフローチャート
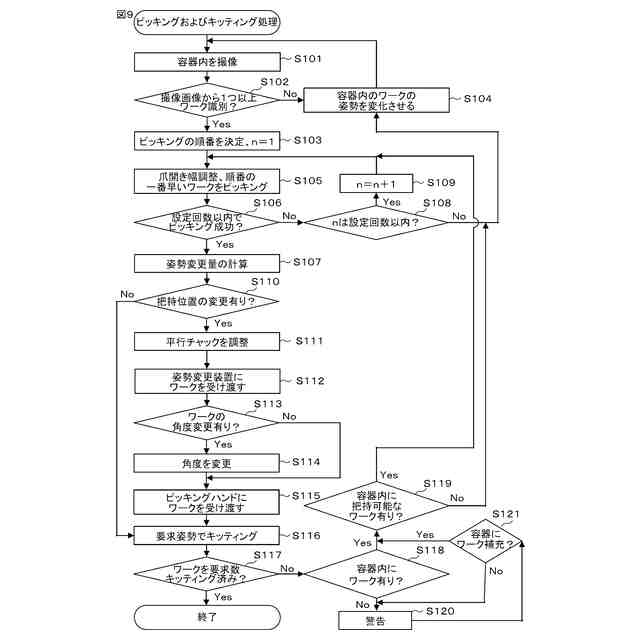
実施の形態1に係るピッキングおよびキッティング処理のフローチャート
本開示の実施の形態2に係る複数種類のワークが混載された容器を例示する図
実施の形態2に係るピッキングシステムのピッキング時の様子を説明する平面図
実施の形態2に係るメインフロー2のフローチャート
【発明を実施するための形態】
【0010】
以下、本開示に係るピッキングシステムについて、図面を参照して説明する。なお、図中、同一または同等の部分には同一の符号を付す。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社エビス
連結具
1か月前
川崎重工業株式会社
ロボット
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
打撃工具
2か月前
株式会社エビス
携帯付属物取付具
2か月前
株式会社ダイヘン
制御装置
2か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社マキタ
電動ハンマ
3か月前
株式会社ダイヘン
搬送装置
3か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
ハンマドリル
1か月前
SMC株式会社
グリッパ
3か月前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボット
1か月前
株式会社近藤製作所
産業用ロボットチャック
3か月前
CKD株式会社
吸着型搬送装置
今日
学校法人立命館
ロボットハンド
2か月前
トヨタ自動車株式会社
ロボットチャック
3か月前
株式会社安川電機
ロボット
3日前
株式会社安川電機
ロボット
3日前
株式会社安川電機
ロボット
3日前
株式会社アイエイアイ
グリッパー
1か月前
川崎重工業株式会社
塗装ロボット
7日前
白山工業株式会社
遠隔操作ロボット機構
3か月前
長堀工業株式会社
締結装置
16日前
株式会社不二越
ロボットの操作装置
1か月前
株式会社アマダ
磁気吸着装置
6日前
株式会社山下工業研究所
ラチェットレンチ
1か月前
株式会社デンソーウェーブ
産業用ロボット
3か月前
中国電力株式会社
ボルト共回り防止用工具
3か月前
株式会社不二越
垂直多関節ロボット
3か月前
工機ホールディングス株式会社
作業機
6日前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
3か月前
白山工業株式会社
ロボットの手首機構
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ