TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025005799
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023106175
出願日
2023-06-28
発明の名称
作業車及び、作業車システム
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
B64U
70/80 20230101AFI20250109BHJP(航空機;飛行;宇宙工学)
要約
【課題】無人飛行体が着陸可能な離着陸部の傾斜角度を制御する作業車を提供すること。
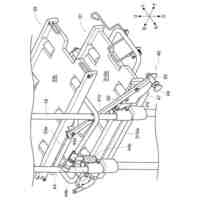
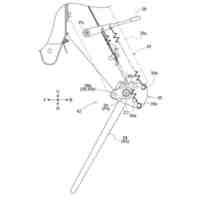
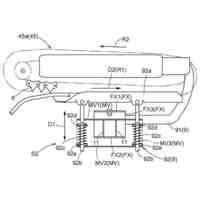
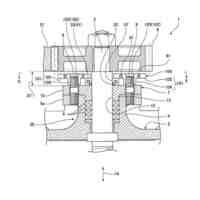
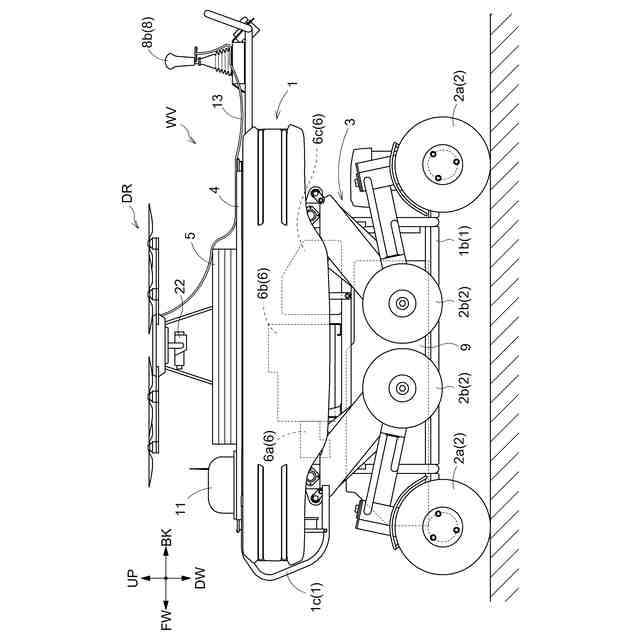
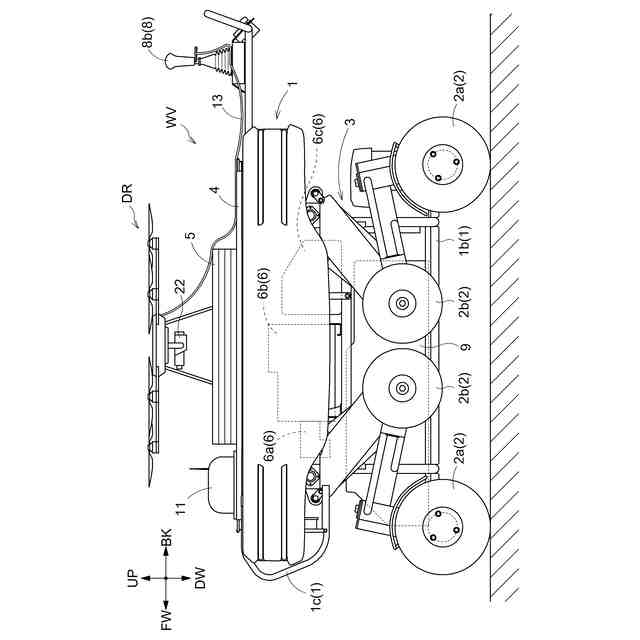
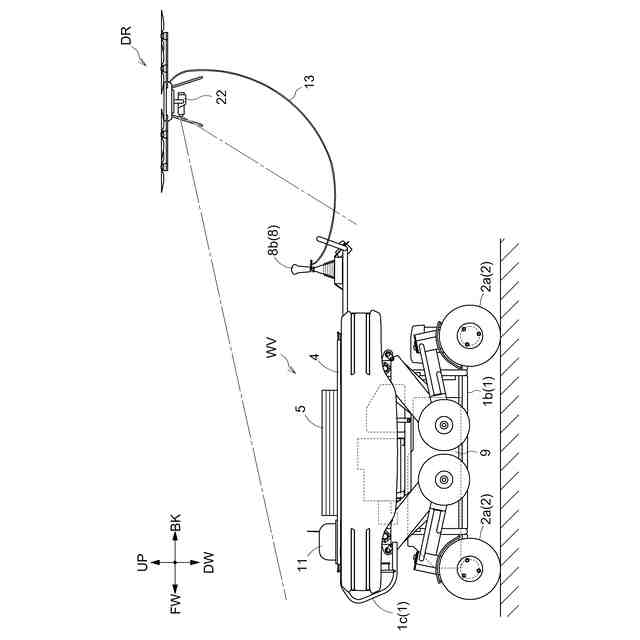
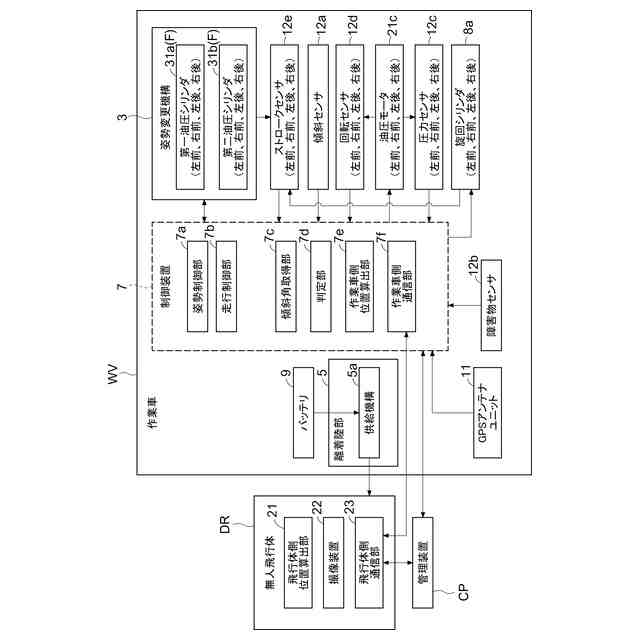
【解決手段】無人飛行体DRが離着陸可能な離着陸部5と、離着陸部5を支持し、地面を走行可能な走行部2と、水平に対する離着陸部5の傾斜角度を取得する傾斜角取得部と、を備える機体と、傾斜角取得部が取得した傾斜角度に応じて機体の姿勢を変更する姿勢変更機構3と、を備え、姿勢変更機構3は傾斜角度が閾値以上である場合、傾斜角度が閾値よりも小さくなるように機体の姿勢を変更する作業車。
【選択図】図1
特許請求の範囲
【請求項1】
無人飛行体が離着陸可能な離着陸部と、前記離着陸部を支持し、地面を走行可能な走行部と、水平に対する前記離着陸部の傾斜角度を取得する傾斜角取得部と、を備える機体と、
前記傾斜角取得部が取得した前記傾斜角度に応じて前記機体の姿勢を変更する姿勢変更機構と、を備え、
前記姿勢変更機構は前記傾斜角度が閾値以上である場合、前記傾斜角度が閾値よりも小さくなるように前記機体の姿勢を変更する作業車。
続きを表示(約 1,000 文字)
【請求項2】
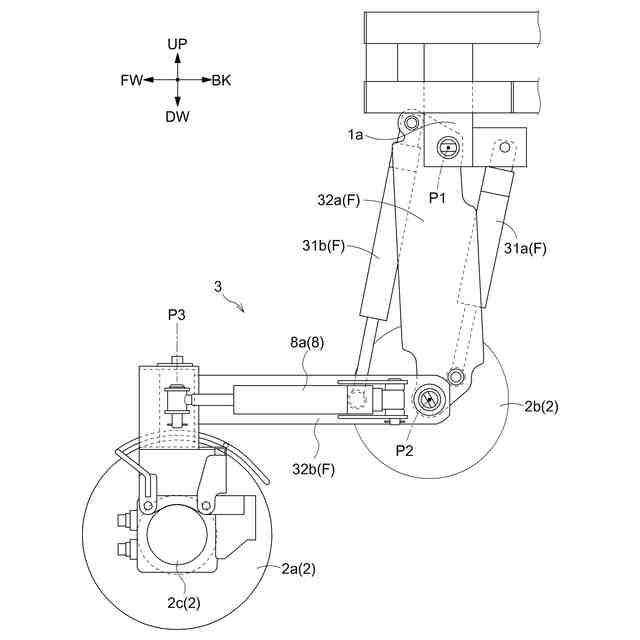
前記姿勢変更機構は、走行車輪によって支持され、伸縮可能な伸縮機構を有し、
前記姿勢変更機構は、前記無人飛行体が前記離着陸部に着陸する際に、前記傾斜角度が閾値以上である場合、前記伸縮機構を伸縮することによって、前記傾斜角度が閾値よりも小さくなるように前記機体の姿勢を変更する請求項1に記載の作業車。
【請求項3】
前記姿勢変更機構は、前記無人飛行体が前記離着陸部に着陸する際に前記傾斜角度が0度となるように前記機体の姿勢を変更する請求項1に記載の作業車。
【請求項4】
前記無人飛行体が有する飛行体側通信部と通信可能な作業車側通信部と、前記離着陸部に前記無人飛行体が着陸可能か判定する判定部と、を更に備え、
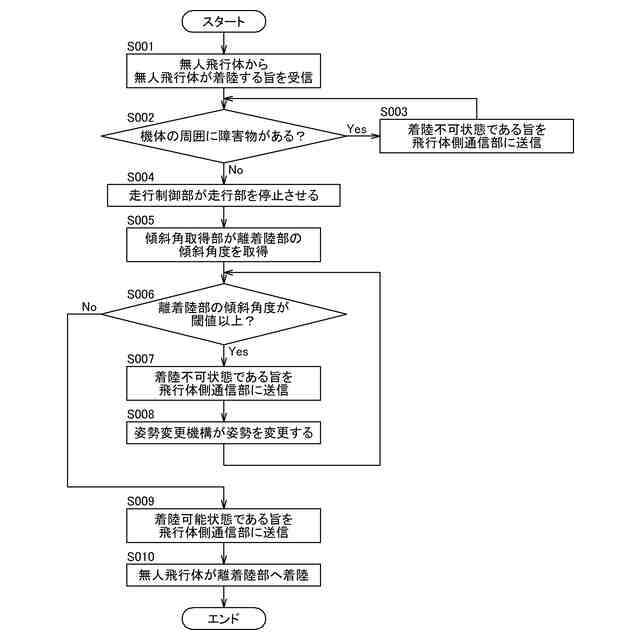
前記判定部は前記傾斜角度が閾値以上である場合には前記離着陸部が着陸不可状態であると判定し、かつ、前記傾斜角度が閾値よりも小さい場合には前記離着陸部が着陸可能状態であると判定し、
前記作業車側通信部は、前記着陸可能状態であるか否かを前記飛行体側通信部へ送信する請求項1に記載の作業車。
【請求項5】
前記機体は、前記機体の周囲を検知するセンサを更に備え、
前記センサの出力信号によって前記機体の周囲に障害物が存在すると判断した場合には、前記作業車側通信部は前記着陸不可状態である旨を前記飛行体側通信部へ送信する請求項4に記載の作業車。
【請求項6】
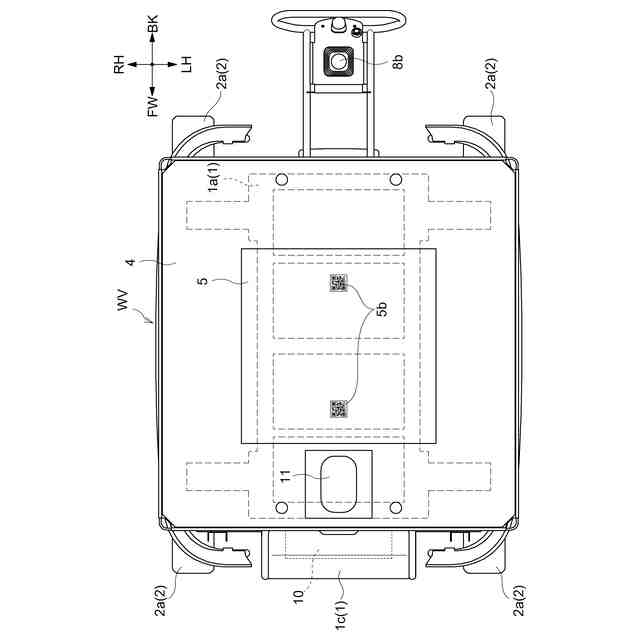
前記離着陸部は、前記無人飛行体に対して前記離着陸部の位置を示すマーカを有する請求項1に記載の作業車。
【請求項7】
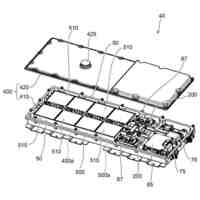
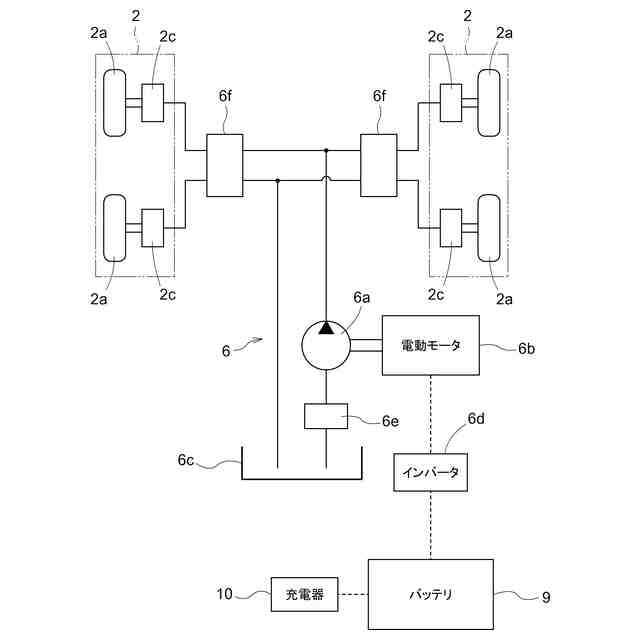
前記機体は、前記機体に電力を供給するバッテリを更に備え、
前記離着陸部は、前記バッテリの電力を前記無人飛行体に供給可能な供給機構を有する請求項1に記載の作業車。
【請求項8】
前記無人飛行体が前記離着陸部に着陸する際に、前記走行部を停止する請求項1に記載の作業車。
【請求項9】
無人飛行体と、
前記無人飛行体が離着陸可能な離着陸部と、前記離着陸部を支持し、地面を走行可能な走行部と、水平に対する前記離着陸部の傾斜角度を取得する傾斜角取得部と、前記傾斜角取得部が取得した前記傾斜角度に応じて姿勢を変更する姿勢変更機構と、を有する作業車と、を備える作業車システムであって、
前記姿勢変更機構は前記傾斜角度が閾値以上である場合、前記傾斜角度が閾値よりも小さくなるように前記作業車の姿勢を変更する作業車システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車及び、作業車システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、ドローンの離着陸に使用されるヘリポートを備える無人走行移動体が開示されている。このヘリポートはプラットホームの基盤とその上に設けたプラットホームの上板の二段構造であり、基盤上に杆体を回動させる駆動機構を設けている。杆体は駆動機構によって回動されることでドローンを捕捉することができる。
【先行技術文献】
【特許文献】
【0003】
国際公開第2016/143806号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されているヘリポートはドローンを捕捉できる杆体が設けられている。これによりドローンをヘリポートに固定できる。しかしながら、このヘリポートには、上板の傾斜角度を制御する機構は設けられていない。
【0005】
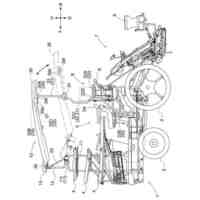
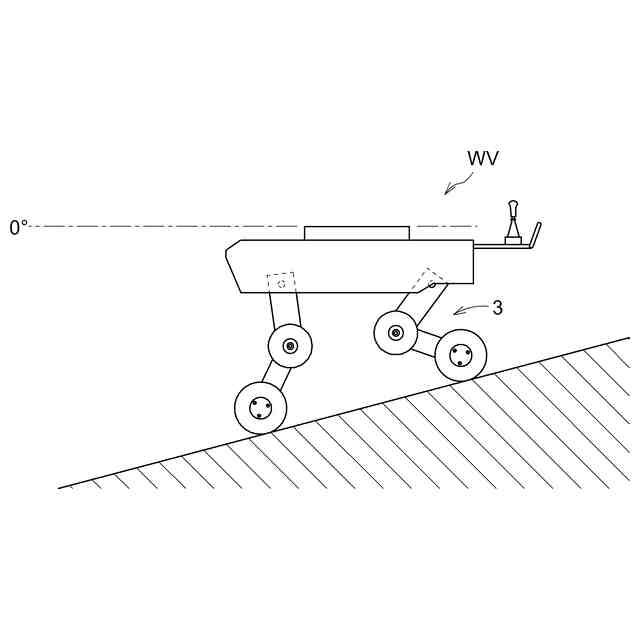
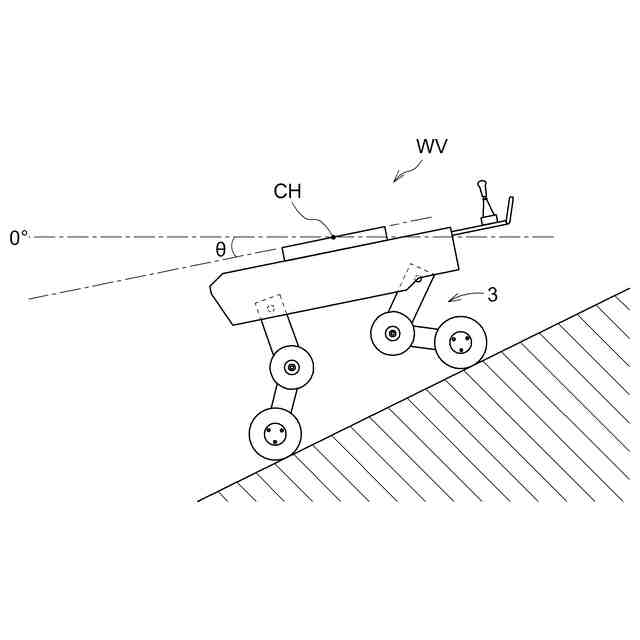
また、凹凸の多い地面や傾斜した地面を走行する場合、機体が傾くことで無人飛行体が着陸可能な離着陸部が傾きやすくなる。離着陸部が傾くことで無人飛行体が離着陸部に着陸しにくくなる。
【0006】
本発明の目的は、無人飛行体が着陸可能な離着陸部の傾斜角度を制御する作業車を提供することにある。
【課題を解決するための手段】
【0007】
上述した課題を解決する手段として、本発明の作業車は、無人飛行体が離着陸可能な離着陸部と、前記離着陸部を支持し、地面を走行可能な走行部と、水平に対する前記離着陸部の傾斜角度を取得する傾斜角取得部と、を備える機体と、前記傾斜角取得部が取得した前記傾斜角度に応じて前記機体の姿勢を変更する姿勢変更機構と、を備え、前記姿勢変更機構は前記傾斜角度が閾値以上である場合、前記傾斜角度が閾値よりも小さくなるように前記機体の姿勢を変更することを特徴とする。
【0008】
本構成によれば、凹凸の多い地面や傾斜した地面を走行する際に機体が傾いた場合でも、従来と比較して姿勢変更機構によって無人飛行体が離着陸部に着陸しやすくなる。
【0009】
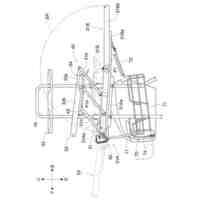
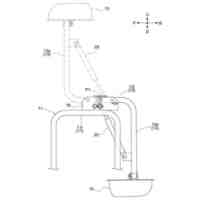
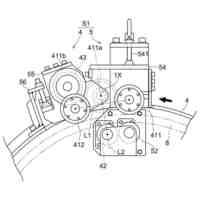
本発明において、前記姿勢変更機構は、走行車輪によって支持され、伸縮可能な伸縮機構を有し、前記姿勢変更機構は、前記無人飛行体が前記離着陸部に着陸する際に、前記傾斜角度が閾値以上である場合、前記伸縮機構を伸縮することによって、前記傾斜角度が閾値よりも小さくなるように前記機体の姿勢を変更すると好適である。
【0010】
傾斜した地面を走行する際に機体の傾斜角度を小さくするように制御する場合、高い位置にある機体の一部が傾斜面に近づく方向に動くと、機体が地面に接触する場合がある。本構成によれば、機体を通り水平方向に延びる軸芯周りに機体を回動させる構成と比較して、柔軟な姿勢変更が可能となり、機体が地面に接触しにくくなる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
20日前
株式会社クボタ
田植機
13日前
株式会社クボタ
田植機
13日前
株式会社クボタ
田植機
13日前
株式会社クボタ
圃場作業機
13日前
株式会社クボタ
コンバイン
15日前
株式会社クボタ
圃場作業機
13日前
株式会社クボタ
バッテリパック
1日前
株式会社クボタ
バッテリパック
1日前
株式会社クボタ
栽培管理システム
21日前
株式会社クボタ
栽培管理システム
21日前
株式会社クボタ
生育管理システム
21日前
株式会社クボタ
自脱型コンバイン
21日前
株式会社クボタ
生育管理支援システム
20日前
株式会社大阪防水建設社
製管機
15日前
株式会社クボタ
管外周面の欠陥判定装置及び欠陥判定方法
17日前
株式会社クボタ建設
弁の漏水防止装置、弁および弁の漏水防止方法
1日前
株式会社クボタ
バッテリパックのハウジングおよびバッテリパック
1日前
株式会社クボタ
作業車
20日前
株式会社クボタ
作業車両
13日前
株式会社クボタ
作業車両、作業車両の制御方法、及び、作業車両のコントローラ
8日前
株式会社クボタ
作業車両、作業車両の制御方法、及び、作業車両のコントローラ
8日前
個人
飛行体
11か月前
個人
ドローン
20日前
個人
ドローンシステム
2か月前
株式会社三圓
浮上装置
6か月前
個人
空港用貨物搬送車
10か月前
個人
ドローンの計測操作方法2
6か月前
個人
ドローンの計測操作方法3
6か月前
個人
飛行艇
8か月前
個人
垂直離着陸機用エンジン改
1か月前
個人
人工衛星推進材循環エンジン
11か月前
個人
マルチコプター型電気飛行機
11か月前
キヤノン電子株式会社
磁気トルカ
7か月前
個人
空中移動システム
3か月前
個人
ドローンを自動離着陸する方法
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ