TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025041472
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2023148800
出願日
2023-09-13
発明の名称
作業車両、作業車両の制御方法、及び、作業車両のコントローラ
出願人
株式会社クボタ
代理人
個人
,
個人
,
個人
主分類
E02F
3/43 20060101AFI20250318BHJP(水工;基礎;土砂の移送)
要約
【課題】インプルメント先端を確実に地面に刺さないようにする。
【解決手段】作業車両は、ジョイントとジョイントと反対のインプルメント先端とを含むインプルメント、ジョイントにおいてインプルメントを揺動可能に支持するアーム先端を含むアーム組立体、ジョイントからインプルメント先端に向かうインプルメント向きを制御するように構成される第1油圧シリンダ、及び、走行装置の接地面に対するアーム先端の高さであるアーム高さを制御するように構成される第2油圧シリンダを備える。コントローラは、アーム高さが基準高さとなるように油圧回路を制御し、インプルメント向きとアーム高さとをそれぞれ基準向きと基準高さに変更するための自動制御の途中に基準向きにインプルメント先端を向けるときのアーム高さである目標高さとなるときにインプルメント向きが基準向きとなるように油圧回路を制御する。目標高さは、基準高さよりも大きい。
【選択図】図7
特許請求の範囲
【請求項1】
ジョイントと前記ジョイントと反対のインプルメント先端とを含むインプルメントと、
前記ジョイントにおいて前記インプルメントを揺動可能に支持するアーム先端と前記アーム先端と反対のアーム基端とを含むアーム組立体と、
前記アーム基端を揺動可能に支持する車両本体と、
前記車両本体を移動させるための走行装置と、
前記ジョイントから前記インプルメント先端に向かうインプルメント向きを制御するように構成される第1油圧シリンダと、
前記走行装置の進行方向に対して垂直な高さ方向において、前記走行装置の接地面に対する前記アーム先端の高さであるアーム高さを制御するように構成される第2油圧シリンダと、
前記第1油圧シリンダ及び前記第2油圧シリンダを制御するように構成される油圧回路と、
前記インプルメント向きを検出するためのインプルメント姿勢検出センサと、
前記アーム高さを検出するためのアーム姿勢検出センサと、
基準となる前記インプルメント向きである基準向きに対応する第1情報と、基準となる前記アーム高さである基準高さに対応する第2情報とを記憶する記憶装置と、
前記油圧回路を制御するように構成されるコントローラと、
前記インプルメント向きと前記アーム高さとをそれぞれ前記基準向きと前記基準高さに変更するための自動制御を行う指示を受け付けるように構成される入力装置と、
を備え、
前記コントローラは、
前記入力装置に前記指示が受け付けられると、前記アーム高さが前記基準高さとなるように前記油圧回路を制御し、
前記自動制御の途中に前記基準向きに前記インプルメント先端を向けたときの前記アーム高さである目標高さに前記アーム高さが変化するときに前記インプルメント向きが前記基準向きとなるように、前記油圧回路を制御し、
前記目標高さは、前記基準高さよりも大きい、
作業車両。
続きを表示(約 3,900 文字)
【請求項2】
前記第1情報は、前記インプルメント向きを表す第1パラメータの、前記基準向きに対応する第1基準値を含み、
前記第2情報は、前記アーム高さを表す第2パラメータの、前記基準高さに対応する第2基準値を含み、
前記コントローラは、
前記入力装置に前記指示が受け付けられると、前記第2パラメータを前記第2基準値とするように、前記油圧回路を制御し、
前記アーム高さが前記目標高さとなるときに前記第1パラメータを前記第1基準値とするように、前記油圧回路を制御する
請求項1に記載の作業車両。
【請求項3】
前記コントローラは、
前記入力装置に前記指示が受け付けられると、
前記基準向きに対応する前記第1油圧シリンダの位置である第1基準位置と、前記基準高さに対応する前記第2油圧シリンダの位置である第2基準位置と、前記目標高さに対応する前記第2油圧シリンダの位置である第2目標位置と、前記指示が受け付けられた時点での前記第1油圧シリンダの位置である第1初期位置と、前記指示が受け付けられた時点での前記第2油圧シリンダの位置である第2初期位置とを求め、
前記第1油圧シリンダの位置が前記第1初期位置から前記第1基準位置となるまでの間、単位時間あたりの前記第1油圧シリンダの位置の変化量の絶対値が、単位時間あたりの前記第2油圧シリンダの位置の変化量の絶対値の(第1基準位置と第1初期位置との差の絶対値/第2目標位置と第2初期位置との差の絶対値)倍となることを目標として、前記油圧回路を制御する、
請求項2に記載の作業車両。
【請求項4】
前記コントローラは、
前記第1パラメータが前記第1基準値となると、前記第2油圧シリンダの位置が前記第2基準位置に変化するまでの間、前記第1油圧シリンダの位置を変化させないように前記油圧回路を制御する、
請求項3に記載の作業車両。
【請求項5】
前記油圧回路は、
前記第1油圧シリンダと前記第2油圧シリンダとに作動油を供給するように構成される油圧ポンプと、
前記第1油圧シリンダと前記油圧ポンプとを接続する第1シリンダ油圧回路と、
前記第2油圧シリンダと前記油圧ポンプとを接続する第2シリンダ油圧回路と、
前記油圧ポンプを駆動させるように構成されるエンジンと、
前記エンジンの回転速度を検出するように構成される回転速度検出センサと、
前記油圧ポンプと前記第1油圧シリンダとの間の前記第1シリンダ油圧回路に設けられ、前記第1油圧シリンダの2つの油室のうち、前記作動油を供給する第1被供給油室を切替可能で、第1開口面積によって前記第1被供給油室に対する単位時間あたりの前記作動油の供給量を調整可能な第1制御弁と、
前記油圧ポンプと前記第2油圧シリンダとの間の前記第2シリンダ油圧回路に設けられ、前記第2油圧シリンダの2つの油室のうち、前記作動油を供給する第2被供給油室を切替可能で、第2開口面積によって前記第2被供給油室に対する単位時間あたりの前記作動油の供給量を調整可能な第2制御弁と、
前記第1制御弁と前記油圧ポンプとの間の前記第1シリンダ油圧回路に設けられた第1圧力補償弁と、前記第2制御弁と前記油圧ポンプとの間の前記第2シリンダ油圧回路に設けられた第2圧力補償弁とを含み、前記第1制御弁から前記第1被供給油室に出力される前記作動油の第1出力油圧が前記第1圧力補償弁から前記第1制御弁に入力される第1入力油圧よりも第1圧力だけ低くなるように制御し、前記第2制御弁から前記第2被供給油室に出力される前記作動油の第2出力油圧が前記第2圧力補償弁から前記第2制御弁に入力される第2入力油圧よりも前記第1圧力だけ低くなるように制御するように構成される圧力制御機構と、
を備え、
前記コントローラは、
前記入力装置に前記指示が受け付けられると、
前記指示が受け付けられた時点での、前記エンジンの前記回転速度に基づいて前記第1開口面積と前記第2開口面積との和の最大許容値を求め、
前記第1開口面積の最大値と前記第2開口面積の最大値との和である限度値を求め、
前記最大許容値と前記限度値とのうちのより小さい参照値を求め、
前記指示が受け付けられた時点での前記第1油圧シリンダの位置である第1初期位置と前記第1基準位置とから、前記第1油圧シリンダの位置を前記第1基準位置とするために前記油圧ポンプから前記第1油圧シリンダに供給する作動油の第1容積を算出し、
前記指示が受け付けられた時点での前記第2油圧シリンダの位置である第2初期位置と前記第2目標位置とから、前記第2油圧シリンダの位置を前記第2目標位置とするために前記油圧ポンプから前記第2油圧シリンダに供給する作動油の第2容積を算出し、
前記第1油圧シリンダの位置が前記第1初期位置から前記第1基準位置となるまでの間、前記参照値の(第1容積/(第1容積+第2容積))倍の基準面積に基づいて、前記第1制御弁の前記第1開口面積を制御する、
請求項3に記載の作業車両。
【請求項6】
前記コントローラは、
前記エンジンの前記回転速度に関連づけられた第1補正係数を前記基準面積に掛けた補正面積が前記第1開口面積の最大値以下であるとき、前記補正面積を第1目標面積とし、
前記補正面積が前記第1開口面積の前記最大値より大きいとき、前記最大値を前記第1目標面積とし、
前記第1油圧シリンダの位置が前記第1初期位置から前記第1基準位置となるまでの間、前記第1制御弁の前記第1開口面積を前記第1目標面積とするようにフィードフォア―ド制御を行う、
請求項5に記載の作業車両。
【請求項7】
前記コントローラは、
前記第1油圧シリンダの位置が前記第1初期位置から前記第1基準位置となるまでの間、前記第2制御弁の前記第2開口面積を前記参照値から前記第1目標面積を引いた第2目標面積とするようにフィードフォア―ド制御を行う、
請求項6に記載の作業車両。
【請求項8】
前記コントローラは、
前記アーム姿勢検出センサによって検出された前記アーム高さを求め、
前記アーム高さに対応する前記第1パラメータの目標値を、前記目標に基づいて算出し、
前記インプルメント姿勢検出センサによって検出された前記第1パラメータの被検出値を取得し、
前記被検出値と前記第1基準値との差の絶対値が前記目標値と前記第1基準値との差の絶対値よりも第1閾値以上大きいときに、前記被検出値を前記目標値に近づけるように、前記第1制御弁の前記第1開口面積を制御対象とするフィードバック制御を行う、
請求項3から7のいずれかに記載の作業車両。
【請求項9】
前記コントローラは、
前記フィードバック制御を開始した後、前記被検出値と前記第1基準値との差の絶対値が前記目標値と前記第1基準値との差の絶対値に前記第1閾値よりも小さい第2閾値を加えた値よりも小さくなったときに、前記第2閾値を下回る直前のフィードバック制御において行われた前記第1制御弁の制御量を、前記第1開口面積が前記第1目標面積となるように前記フィードフォア―ド制御を行った場合の前記第1制御弁の制御量で除した値を第2補正係数として、前記第2閾値を下回る直後から前記第1油圧シリンダの位置が前記第1基準位置となるまでの間、前記第1制御弁の前記第1開口面積を前記第1目標面積に前記第2補正係数を掛けた値とするようにフィードフォア―ド制御を行う、
請求項8に記載の作業車両。
【請求項10】
前記記憶装置は、
前記第1油圧シリンダの位置が前記第1基準位置となる直前の、単位時間あたりの前記第1油圧シリンダの位置の変化量である第1アプローチ速度と、
前記第1油圧シリンダの変位速度から前記第1アプローチ速度まで減速するための第1減速度と、
を記憶し、
前記コントローラは、
前記インプルメント姿勢検出センサによって検出された前記第1油圧シリンダの被検出位置を求め、
前記被検出位置の時間変化から単位時間あたりの前記第1油圧シリンダの前記被検出位置の変化量である前記第1油圧シリンダの前記変位速度を求め、
前記第1油圧シリンダの前記変位速度と前記第1アプローチ速度との差を前記第1減速度で除することによって第1減速時間を算出し、
前記第1油圧シリンダの前記変位速度と、前記第1減速時間と、前記第1基準位置とに基づいて、前記第1油圧シリンダの前記変位速度からの減速を開始する前記第1油圧シリンダの減速開始位置を算出し、
前記第1油圧シリンダの前記被検出位置が前記第1油圧シリンダの前記減速開始位置に到達してから、前記第1油圧シリンダの前記変位速度が前記第1アプローチ速度となるまで、前記第1油圧シリンダの前記変位速度を前記第1減速度に基づいて減速するように、前記第1制御弁の前記第1開口面積を制御する、
請求項5から7のいずれかに記載の作業車両。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両、作業車両の制御方法、及び、作業車両のコントローラに関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
特許文献1は、積荷をダンプさせたときのインプルメント、アームの位置姿勢から、あらかじめ記憶されたインプルメント、アームの基準となる位置姿勢に変更する自動インプルメント戻り制御を実行可能な作業車両を開示している。
【先行技術文献】
【特許文献】
【0003】
米国特許第7,894,962号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に係る作業車両において、ブームを下した後にもインプルメント先端の角度を修正しているため、インプルメント先端を地面に刺す恐れがあった。
【0005】
本願に開示される技術の課題は、自動インプルメント戻り制御において、インプルメント先端を確実に地面に刺さないようにする作業車両、作業車両の制御方法、及び、作業車両のコントローラを提供することにある。
【課題を解決するための手段】
【0006】
本開示の第1態様に係る作業車両は、インプルメントと、アーム組立体と、車両本体と、走行装置と、第1油圧シリンダと、第2油圧シリンダと、油圧回路と、インプルメント姿勢検出センサと、アーム姿勢検出センサと、記憶装置と、コントローラと、入力装置とを備える。インプルメントは、ジョイントとジョイントと反対のインプルメント先端とを含む。アーム組立体は、ジョイントにおいてインプルメントを揺動可能に支持するアーム先端とアーム先端と反対のアーム基端とを含む。車両本体は、アーム基端を揺動可能に支持する。走行装置は、車両本体を移動させるように構成される。第1油圧シリンダは、ジョイントからインプルメント先端に向かうインプルメント向きを制御するように構成される。第2油圧シリンダは、走行装置の進行方向に対して垂直な高さ方向において、走行装置の接地面に対するアーム先端の高さであるアーム高さを制御するように構成される。油圧回路は、第1油圧シリンダ及び第2油圧シリンダを制御するように構成される。インプルメント姿勢検出センサは、インプルメント向きを検出するように構成される。アーム姿勢検出センサは、アーム高さを検出するように構成される。記憶装置は、基準となるインプルメント向きである基準向きに対応する第1情報と、基準となるアーム高さである基準高さに対応する第2情報とを記憶する。コントローラは、油圧回路を制御するように構成される。入力装置は、インプルメント向きとアーム高さとをそれぞれ基準向きと基準高さに変更するための自動制御を行う指示を受け付けるように構成される。コントローラは、入力装置に指示が受け付けられると、アーム高さが基準高さとなるように油圧回路を制御する。コントローラは、自動制御の途中に基準向きにインプルメント先端を向けたときのアーム高さである目標高さにアーム高さが変化するときに油圧回路を制御する。目標高さは、基準高さよりも大きい。
【0007】
本開示の第2態様に係る作業車両の制御方法は、作業車両のアーム先端に対してインプルメントを回動可能に接続するジョイントからインプルメント先端に向かうインプルメント向きの基準となる基準向きを取得することを含む。当該制御方法は、作業車両の走行装置の進行方向に対して垂直な高さ方向において走行装置の接地面に対するアーム先端の高さであるアーム高さの基準となる基準高さを取得することを含む。当該制御方法は、インプルメント向きとアーム高さとをそれぞれ基準向きと基準高さに変更するための自動制御を行う指示が受け付けられると、アーム高さが基準高さとなるように第2油圧シリンダを制御することを含む。当該制御方法は、基準向きにインプルメント先端を向けたときのアーム高さであって、基準高さよりも大きい目標高さにアーム高さが変化するときに、インプルメント向きが基準向きとなるように第1油圧シリンダを制御することを含む。
【0008】
本開示の第3態様に係る作業車両のコントローラは、メモリと、プロセッサとを備える。メモリは、作業車両のアーム先端に対してインプルメントを回動可能に接続するジョイントからインプルメント先端に向かうインプルメント向きを表す第1パラメータの、インプルメント向きの基準となる基準向きに対応する第1基準値と、作業車両の走行装置の進行方向に対して垂直な高さ方向において走行装置の接地面に対するアーム先端の高さであるアーム高さを表す第2パラメータの、アーム高さの基準となる基準高さに対応する第2基準値とを記憶するように構成される。プロセッサは、インプルメント向きとアーム高さとをそれぞれ基準向きと基準高さに変更するための自動制御を行う指示が受け付けられると、第2パラメータを第2基準値とするように第2油圧シリンダを制御し、基準向きにインプルメント先端を向けたときのアーム高さであって、基準高さよりも大きい目標高さにアーム高さが変化するときに、第1パラメータを第1基準値とするように第1油圧シリンダを制御するように構成される。
【発明の効果】
【0009】
本願に開示される技術によれば、例えば、自動インプルメント戻り制御において、インプルメント先端を確実に地面に刺さないようにする作業車両、作業車両の制御方法、及び、作業車両のコントローラを提供することができる。
【図面の簡単な説明】
【0010】
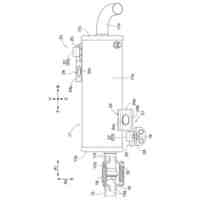
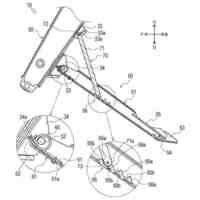
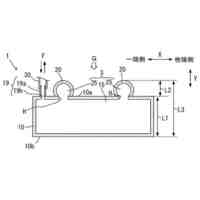
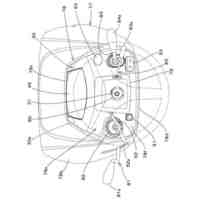
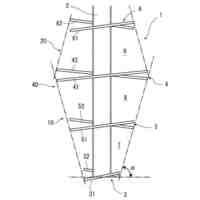
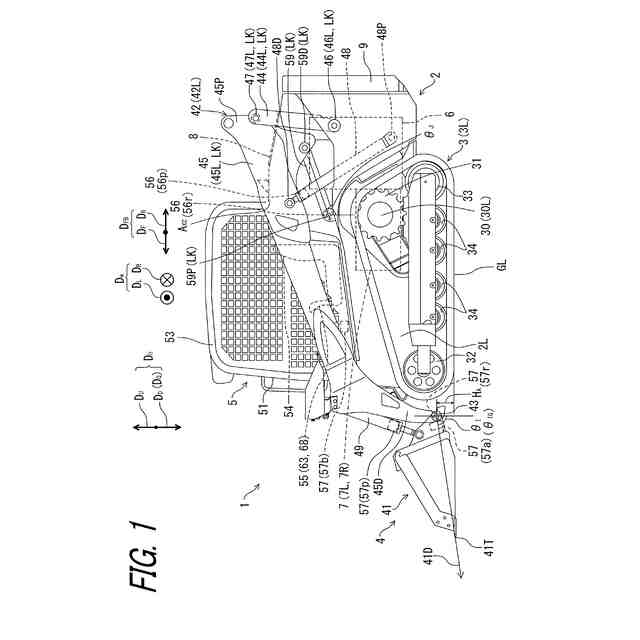
図1は、作業車両の側面図である。
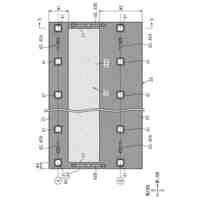
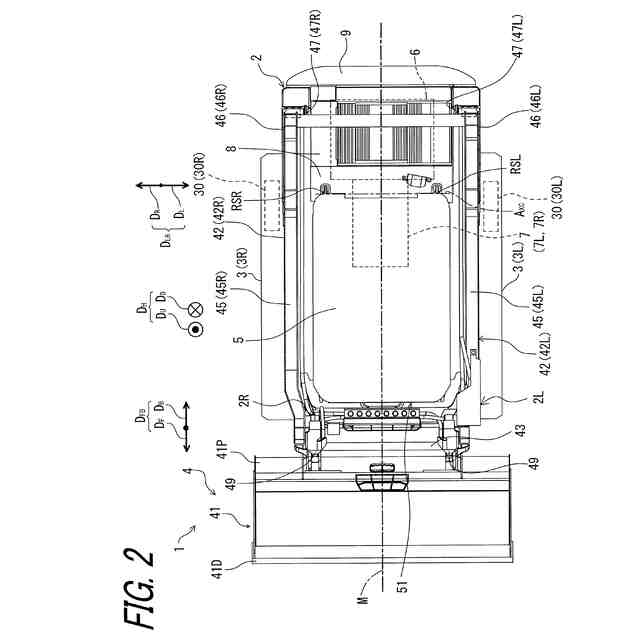
図2は、作業車両の上面図である。
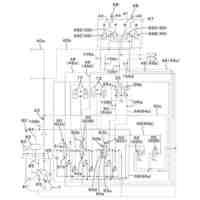
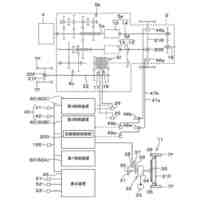
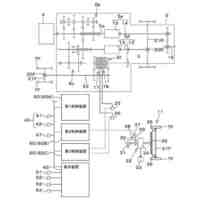
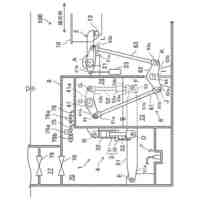
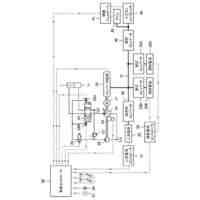
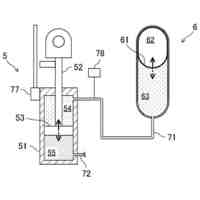
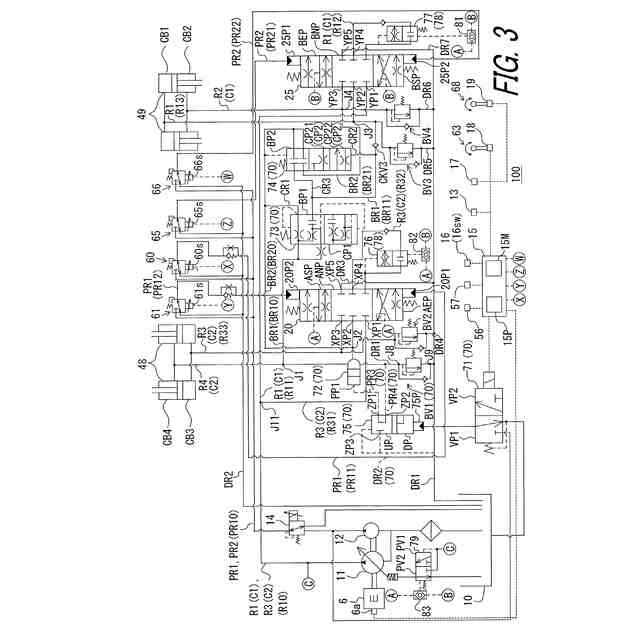
図3は、作業車両の第1油圧シリンダと第2油圧シリンダと油圧回路との概略構成図である。
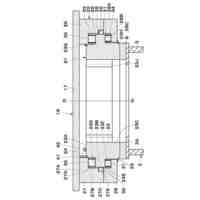
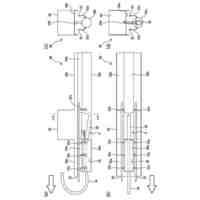
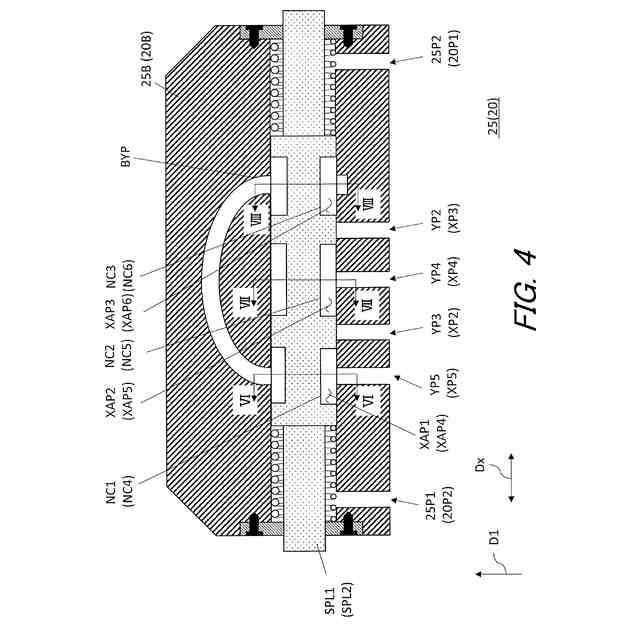
図4は、第1制御弁と第2制御弁の内部構成の一例を表した概略構成図である。
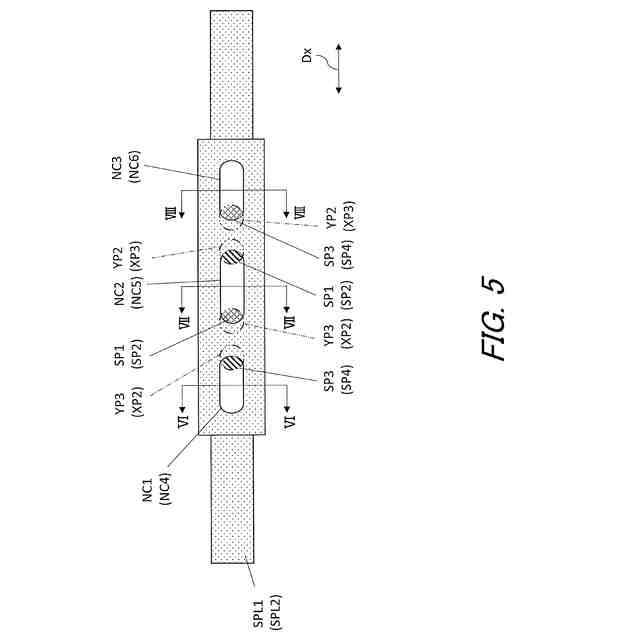
図5は、図4の第1方向から見た第1スプールと第2スプールを見た図である。
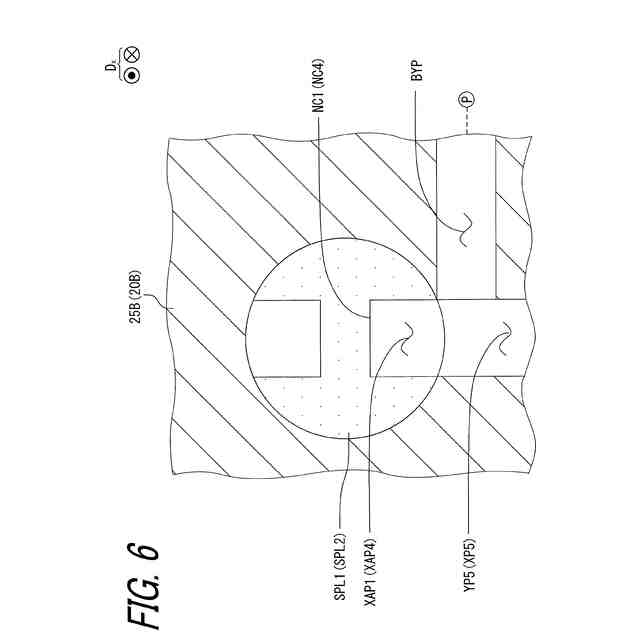
図6は、図4のラインVI-VIにおける第1制御弁と第2制御弁の断面図である。
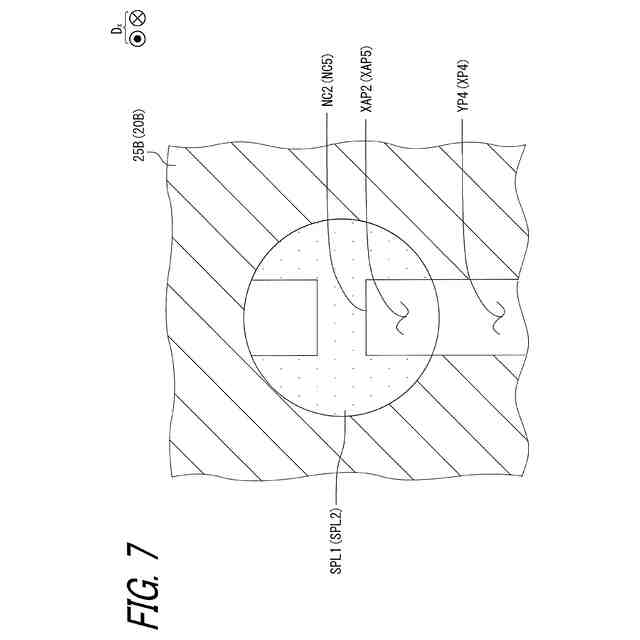
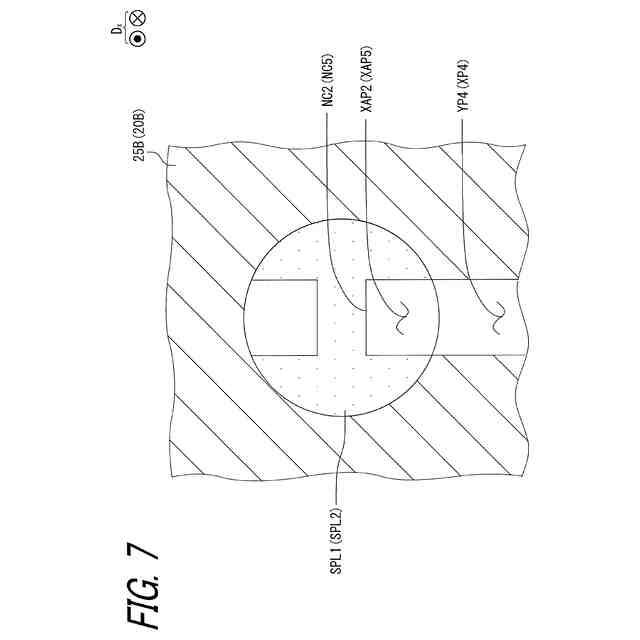
図7は、図4のラインVII-VIIにおける第1制御弁と第2制御弁の断面図である。
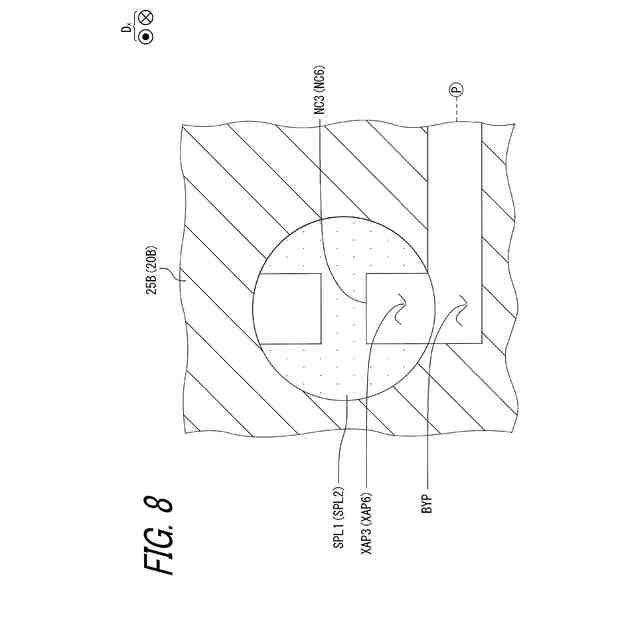
図8は、図4のラインVIII-VIIIにおける第1制御弁と第2制御弁の断面図である。
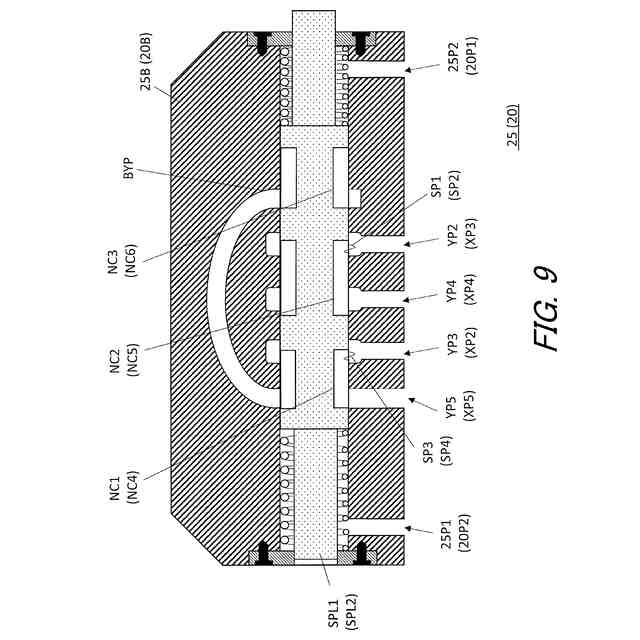
図9は、第1制御弁と第2制御弁の内部構成の別の一例を表した概略構成図である。
図10は、第1制御弁と第2制御弁の内部構成のさらに別の一例を表した概略構成図である。
図11は、インプルメント姿勢検出センサが第1慣性計測ユニットと第2慣性計測ユニットとから成る場合の自動インプルメント戻り制御の概念図である。
図12は、インプルメント姿勢検出センサがポテンショメータから成る場合の自動インプルメント戻り制御の概念図である。
図13は、自動インプルメント戻り制御におけるアーム高さの変化とインプルメント傾角の変化との関係を表す図である。
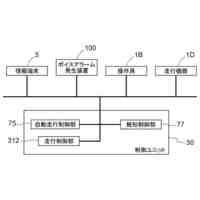
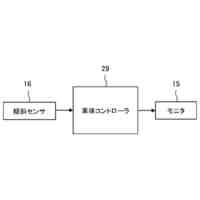
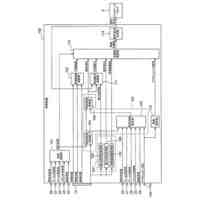
図14は、実施形態に係る制御ブロック図である。
図15は、自動インプルメント戻り制御におけるアーム高さの変化とジョイントの回転角の変化との関係を表す図である。
図16は、自動インプルメント戻り制御におけるアーム高さの変化と第1油圧シリンダの位置の変化との関係を表す図である。
図17は、エンジン6の回転速度と第1補正係数との関係を表す図である。
図18は、第1油圧シリンダのクッション制御の概念を表す図である。
図19は、第2油圧シリンダのクッション制御の概念を表す図である。
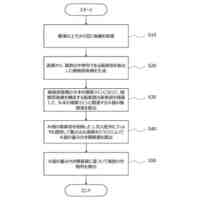
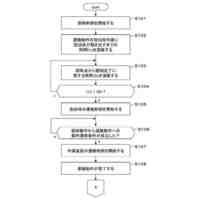
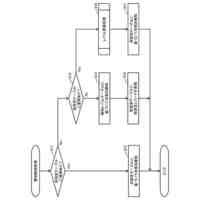
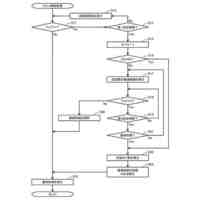
図20は、作業車両の制御方法を示すフローチャートである。
図21は、油圧回路の変形例を示す。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
15日前
株式会社クボタ
作業機
12日前
株式会社クボタ
作業車
5日前
株式会社クボタ
麺または麺生地
今日
株式会社クボタ
農業管理システム
12日前
株式会社クボタ
農業管理システム
12日前
株式会社クボタ
パンまたはパン生地
今日
株式会社クボタ
パンまたはパン生地
今日
株式会社クボタ
米ペーストの製造方法
今日
株式会社クボタ
フロントローダ及び作業車両
5日前
株式会社クボタ
管支持装置及び管支持装置の設置方法
5日前
株式会社クボタ
農業支援システムおよび作物列の検出方法
14日前
株式会社クボタ
放牧支援システム、放牧支援装置、及び放牧支援方法
5日前
株式会社クボタ
作業機
12日前
株式会社クボタ
トラクタ
12日前
株式会社クボタ
作業車両
12日前
株式会社クボタ
作業車両
7日前
個人
長尺平板パネル
5日前
個人
構造物の検査方法
6日前
株式会社東部
多翼型鋼管杭
8日前
株式会社大林組
基礎構造
12日前
カナデビア株式会社
起伏ゲート
6日前
日本車輌製造株式会社
杭打機
8日前
日立建機株式会社
建設機械
12日前
株式会社クボタ
作業機
12日前
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業機械
14日前
カナデビア株式会社
係留装置及びその制御方法
6日前
構法開発株式会社
埋込継手構造
5日前
日立建機株式会社
建設機械
14日前
株式会社クボタ
フロントローダ及び作業車両
5日前
末広産業株式会社
水路用型枠ユニット
13日前
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業機械
8日前
日立建機株式会社
作業機械
12日前
株式会社熊谷組
山留めアンカーの位置測量方法
14日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ