TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025061314
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2025005417,2023117728
出願日
2025-01-15,2020-11-27
発明の名称
作業機
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250403BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】オペレータが、操作を受け付けない間に報知を確認することができ、適切に操作が行われることを目的とする。
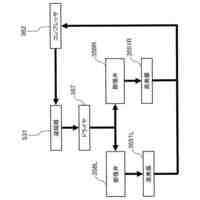
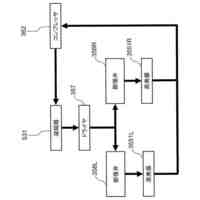
【解決手段】自車位置に基づいて圃場内の所定の走行経路を自動走行するように走行制御部312を制御する自動走行制御部75と、人為的な操作により走行制御部312を制御する操作具1Bと、所定の報知を行う報知部(5,100)とを備え、自動走行制御部75は、自動走行中に所定の条件が成立すると自動走行を一時停止すると共に機体を停止させ、かつ、一時停止中に操作具1Bに対する操作が行われると、一時停止状態から別の状態に移行し、自動走行制御部75は、一時停止をした場合、所定の第一時間の間に操作具1Bに対する操作を受け付けず、報知部(5,100)は、第一時間の間に所定のガイダンスを報知する。
【選択図】図33
特許請求の範囲
【請求項1】
走行装置と、
前記走行装置を制御する走行制御部と、
衛星からの衛星信号を受信する衛星アンテナと、
前記衛星信号に基づいて自車位置に対応する測位データを出力する衛星測位ユニットと、
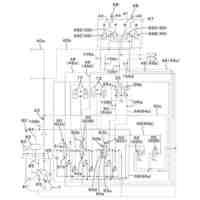
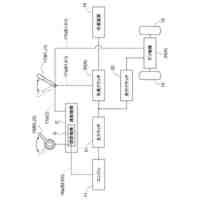
前記自車位置に基づいて圃場内の所定の走行経路を自動走行するように前記走行制御部を制御する自動走行制御部と、
人為的な操作により前記走行制御部を制御する操作具と、
所定の報知を行う報知部とを備え、
前記自動走行制御部は、自動走行中に所定の条件が成立すると前記自動走行を一時停止すると共に機体を停止させ、かつ、一時停止中に前記操作具に対する操作が行われると、一時停止状態から別の状態に移行し、
前記自動走行制御部は、一時停止をした場合、所定の第一時間の間に前記操作具に対する操作を受け付けず、
前記報知部は、前記第一時間の間に所定のガイダンスを報知する作業機。
発明の詳細な説明
【技術分野】
【0001】
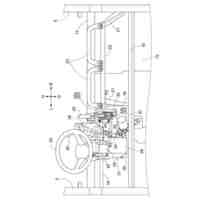
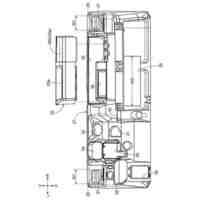
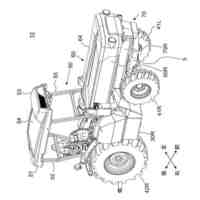
圃場等の作業地に対して、自動走行しながら作業を行う作業機に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1に開示されるように、作業車両(作業機)は、圃場(作業地)を走行しながら、植付作業等の作業を行う。また、作業車両(作業機)は、自動走行により、作業走行を行う。作業車両(作業機)は、走行経路を算出し、GNSS(Global Navigation Satellite System)等を用いて算出した自機位置に基づいて走行経路に沿った自動走行を行う。
【先行技術文献】
【特許文献】
【0003】
特開2019-154394号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような作業車両(作業機)においては、自動作業走行における、さらなる利便性の向上が求められている。
【課題を解決するための手段】
【0005】
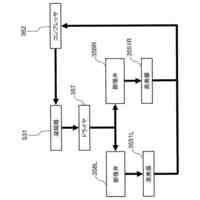
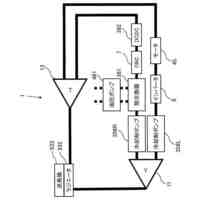
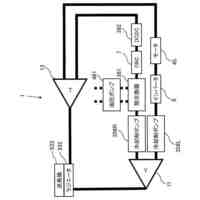
上記目的を達成するために、本発明の一実施形態に係る作業機は、走行装置と、前記走行装置を制御する走行制御部と、衛星からの衛星信号を受信する衛星アンテナと、前記衛星信号に基づいて自車位置に対応する測位データを出力する衛星測位ユニットと、前記自車位置に基づいて圃場内の所定の走行経路を自動走行するように前記走行制御部を制御する自動走行制御部と、人為的な操作により前記走行制御部を制御する操作具と、所定の報知を行う報知部とを備え、前記自動走行制御部は、自動走行中に所定の条件が成立すると前記自動走行を一時停止すると共に機体を停止させ、かつ、一時停止中に前記操作具に対する操作が行われると、一時停止状態から別の状態に移行し、前記自動走行制御部は、一時停止をした場合、所定の第一時間の間に前記操作具に対する操作を受け付けず、前記報知部は、前記第一時間の間に所定のガイダンスを報知する。
【0006】
自動走行中は種々の報知が行われる。また、自動走行が一時停止された場合にも、報知として、各種警告や、自動走行を再開させるための操作や別の状態に移行されるための操作等についてのガイダンスが行われる。作業者や運転者等のオペレータは、このような報知を参照に操作を行うことができる。しかしながら、報知を確認せず、誤って操作が行われると、オペレータの意図に反した不適切な走行が行われる場合がある。
【0007】
上記構成によると、オペレータは、操作を受け付けない間に報知を確認することができ、適切に操作を行うことができる。
さらに、本発明の一実施形態に係る作業機は、走行装置と、前記走行装置を制御する走行制御部と、衛星からの衛星信号を受信する衛星アンテナと、前記衛星信号に基づいて自車位置に対応する測位データを出力する衛星測位ユニットと、前記自車位置に基づいて圃場内の所定の走行経路を自動走行するように前記走行制御部を制御する自動走行制御部と、資材を用いた作業を行う作業装置とを備え、前記自動走行は前記圃場内の向かい合う2つの外周辺間の往復走行経路を自動走行しながら作業を行う往復作業走行を含み、前記自動走行制御部は事前に設定可能な資材補給ありモードまたは資材補給なしモードで制御することができ、前記資材補給ありモードは前記往復走行経路の少なくとも一方の前記外周辺側の終了点で前記自動走行を一時停止させて資材の補給動作に移行するか前記往復作業走行を継続するかに切り替える人為操作を受け付けることができ、前記資材補給なしモードは前記往復走行経路の少なくとも一方の前記外周辺側の終了点でも前記自動走行を継続させる。
また、前記自動走行制御部は、前記資材補給なしモードにおいて、前記往復走行経路の少なくとも一方の前記外周辺側の終了点で、前記自動走行を継続させて旋回走行に移行してもよい。
また、人為的な操作により前記走行制御部を制御する操作具をさらに備え、前記自動走行制御部は、一時停止をした場合、所定の第一時間の間に前記操作具に対する前記操作を受け付けない構成であってもよい。
また、所定の報知を行う報知部をさらに備え、前記報知部は、前記第一時間の間に、前記補給動作に移行するための前記操作および前記往復作業走行を継続するための前記操作に関するガイダンスを報知してもよい。
また、前記資材補給ありモードにおいて、一時停止中に前記操作具に対する前記操作が行われると、前記走行制御部は、前記操作に応じて、機体を、前記一方の外周辺に向かって走行させてもよい。
また、前記資材補給ありモードにおいて、前記自動走行制御部は、一時停止後に前記第一時間より長い第二時間にわたって前記操作が行われないと前記自動走行を再開させ、一時停止後に前記操作具が前記操作されると前記走行制御部に前記操作具に対する前記操作に応じて前記走行装置を制御させてもよい。
【0008】
また、前記ガイダンスは、前記自動走行の一時停止中に行うことができる前記操作具に対する操作の内容と、前記自動走行の状態とのうちの少なくともいずれかを含んでも良い。
【0009】
このような構成により、必要な操作や、知るべき情報を適切に確認することができ、適切な操作を行うための補助が提供される。
【0010】
また、前記別の状態は、前記自動走行が再開される状態と、前記操作具の操作に応じた前記走行制御部の制御が可能な状態とのうちの少なくともいずれかを含んでも良い。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
19日前
株式会社クボタ
作業車
29日前
株式会社クボタ
作業機
26日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車
29日前
株式会社クボタ
カバー
29日前
株式会社クボタケミックス
配管構造
8日前
株式会社クボタ
比重分離装置
1か月前
株式会社クボタ
比重分離装置
1か月前
株式会社クボタ
比重分離装置
1か月前
株式会社クボタ
比重分離装置
1か月前
株式会社クボタ
歩行型作業機
4日前
株式会社クボタ
歩行型作業機
4日前
株式会社クボタ
歩行型作業機
4日前
株式会社クボタ
歩行型作業機
4日前
株式会社クボタ
麺または麺生地
14日前
株式会社クボタ
バッテリパック
1か月前
株式会社クボタ
バッテリパック
1か月前
株式会社クボタ
農業管理システム
26日前
株式会社クボタ
農業管理システム
26日前
株式会社クボタ
パンまたはパン生地
14日前
株式会社クボタ
パンまたはパン生地
14日前
株式会社クボタ
米ペーストの製造方法
14日前
株式会社クボタ
電気車両の空冷システム
12日前
株式会社クボタ
電気車両の空冷システム
12日前
株式会社クボタ
電気車両の空冷システム
6日前
株式会社クボタ
電気車両の液冷システム
12日前
株式会社クボタ
電気車両の液冷システム
12日前
株式会社クボタ
電気車両の液冷システム
6日前
株式会社クボタ
電気車両の空冷システム
12日前
株式会社クボタ
電気車両の空冷システム
6日前
株式会社クボタ
フロントローダ及び作業車両
19日前
株式会社クボタケミックス
差口付き管継手および変換継手
8日前
株式会社クボタ
車両のための電動モータ支持装置
12日前
株式会社クボタ
電気車両のための緊急停止スイッチ
12日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ