TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025061460
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2025007293,2023114546
出願日
2025-01-20,2018-01-23
発明の名称
作業車両
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
A01B
69/00 20060101AFI20250403BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】簡単に車体の進行方向を整えることができるようにする。
【解決手段】作業車両は、走行可能な車体と、前記車体の操舵を行うステアリングハンドルと、前記ステアリングハンドルによる手動操舵と、前記車体が予め設定された走行基準ラインに平行な走行予定ラインに沿って走行するように前記ステアリングハンドルを操舵する自動操舵とのいずれかで、前記車体の走行を制御可能な制御装置と、前記制御装置が前記自動操舵による前記車体の走行の制御を開始する前に、前記走行基準ラインを設定するためのガイダンス画面を表示する表示装置と、を備え、前記ガイダンス画面は、前記走行基準ラインの始点及び終点の設定を促す旨を表示するメッセージ表示部と、前記始点を示す始点アイコンと前記終点を示す終点アイコンとが表示されるアイコン表示部と、前記始点及び終点を設定する際の操作を示す操作表示部と、を含む。
【選択図】図1
特許請求の範囲
【請求項1】
走行可能な車体と、
前記車体の操舵を行うステアリングハンドルと、
前記ステアリングハンドルによる手動操舵と、前記車体が予め設定された走行基準ラインに平行な走行予定ラインに沿って走行するように前記ステアリングハンドルを操舵する自動操舵とのいずれかで、前記車体の走行を制御可能な制御装置と、
前記制御装置が前記自動操舵による前記車体の走行の制御を開始する前に、前記走行基準ラインを設定するためのガイダンス画面を表示する表示装置と、
を備え、
前記ガイダンス画面は、前記走行基準ラインの始点及び終点の設定を促す旨を表示するメッセージ表示部と、前記始点を示す始点アイコンと前記終点を示す終点アイコンとが表示されるアイコン表示部と、前記始点及び終点を設定する際の操作を示す操作表示部と、を含む作業車両。
続きを表示(約 240 文字)
【請求項2】
前記メッセージ表示部が前記ガイダンス画面の上部に、前記アイコン表示部が前記ガイダンス画面の中央に、前記操作表示部が前記ガイダンス画面の幅方向端部に表示されている請求項1に記載の作業車両。
【請求項3】
前記表示装置は、前記制御装置が前記自動操舵による前記車体の走行の制御を開始する前に、前記走行基準ラインに対する前記車体の操舵方向を示す操舵指示部を表示することで前記車体の進行方向を整える指令を表示する請求項1又は2に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば、作業車両に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、農作業機として特許文献1が知られている。特許文献1の農作業機は、手動操舵による手動走行と、基準走行ラインに平行に設定される設定走行ラインに沿って自動操舵により走行する自動走行とを切替自在な走行機体と、手動走行と自動走行とを切替自在な切替スイッチとを備えている。また、農作業機は、畝に沿って走行中に右指示ボタンを押した後、基準走行ラインの始点が設定され、走行中に左指示ボタンを押すことによって基準走行ラインの終点が設定される。即ち、自動操舵前に基準走行ラインの設定を行っている。
【先行技術文献】
【特許文献】
【0003】
特開2017-123803号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の農作業機では、特許文献1の農作業機では、自動操舵前には、右指示ボタン及び左指示ボタン等を操作することにより基準走行ラインの設定を行ったり、基準走行ラインの設定中にマーカ装置によって田面に描いた指標線とセンターマスコットを利用して機体の位置合わせをしてから、設定走行ラインに沿う自動操舵を開始している。運転者は、自動操舵の開始前の設定において、機体の操舵等の走行に関する事項を把握しておく必要があり、走行に関する事項を把握できていない場合には、基準走行ラインの設定、基準走行ラインの設定時の走行、機体の位置合わせ等が大変である。
【0005】
そこで、本発明は上記問題点に鑑み、簡単に車体の進行方向を整えることができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
この技術的課題を解決するための本発明の技術的手段は、以下に示す点を特徴とする。
作業車両は、走行可能な車体と、前記車体の操舵を行うステアリングハンドルと、前記ステアリングハンドルによる手動操舵と、前記車体が予め設定された走行基準ラインに平行な走行予定ラインに沿って走行するように前記ステアリングハンドルを操舵する自動操舵とのいずれかで、前記車体の走行を制御可能な制御装置と、前記制御装置が前記自動操舵による前記車体の走行の制御を開始する前に、前記走行基準ラインを設定するためのガイダンス画面を表示する表示装置と、を備え、前記ガイダンス画面は、前記走行基準ラインの始点及び終点の設定を促す旨を表示するメッセージ表示部と、前記始点を示す始点アイコンと前記終点を示す終点アイコンとが表示されるアイコン表示部と、前記始点及び終点を設定する際の操作を示す操作表示部と、を含む。
【0007】
前記メッセージ表示部が前記ガイダンス画面の上部に、前記アイコン表示部が前記ガイダンス画面の中央に、前記操作表示部が前記ガイダンス画面の幅方向端部に表示されている。
前記表示装置は、前記制御装置が前記自動操舵による前記車体の走行の制御を開始する前に、前記走行基準ラインに対する前記車体の操舵方向を示す操舵指示部を表示することで前記車体の進行方向を整える指令を表示する。
【発明の効果】
【0008】
本発明によれば、簡単に車体の進行方向を整えることができる。
【図面の簡単な説明】
【0009】
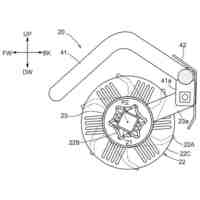
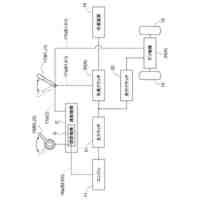
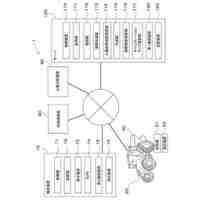
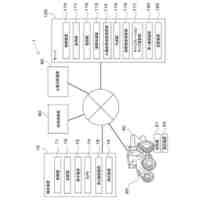
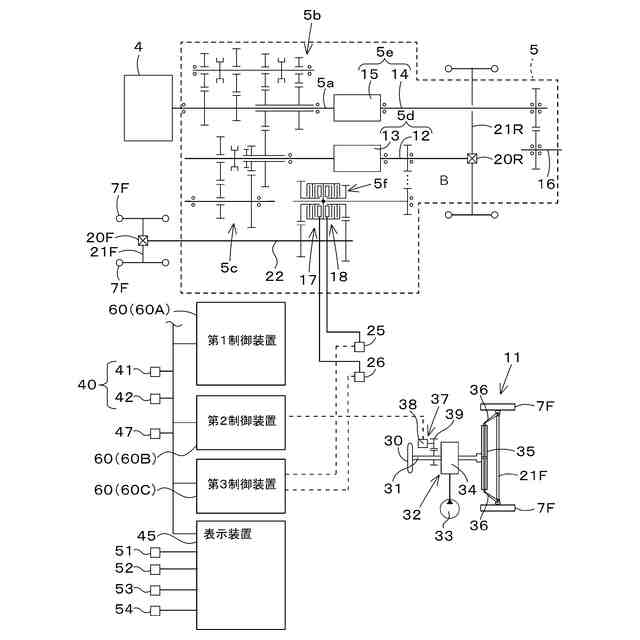
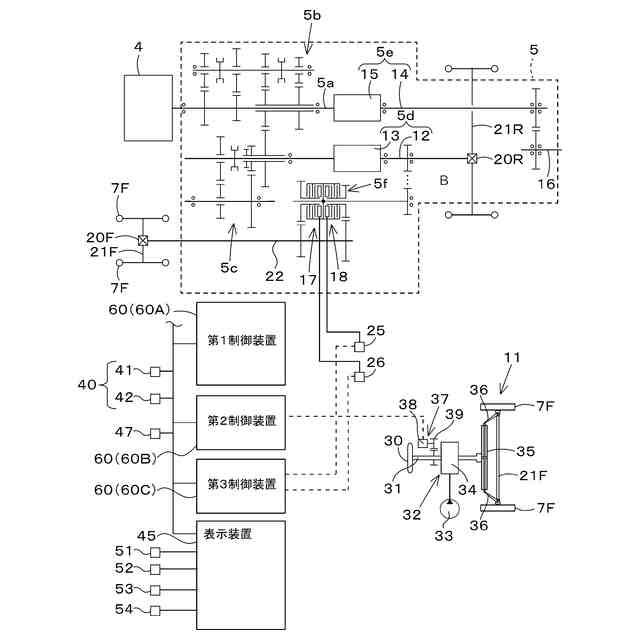
トラクタの構成及び制御ブロック図を示す図である。
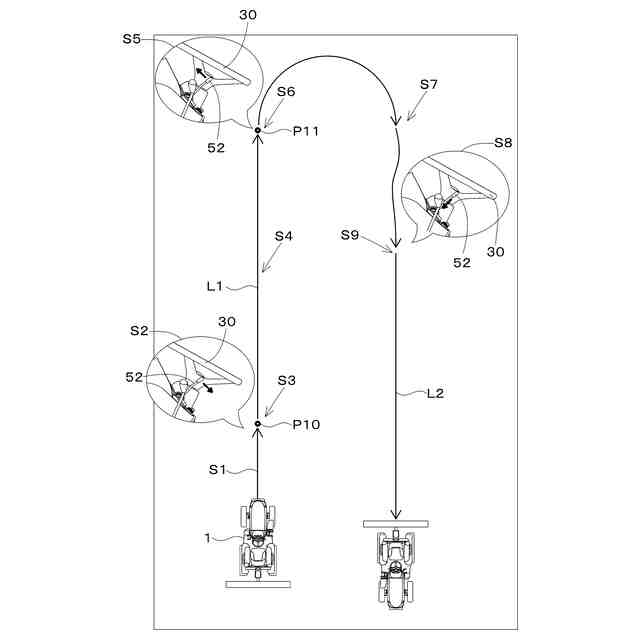
自動操舵を説明する説明図である。
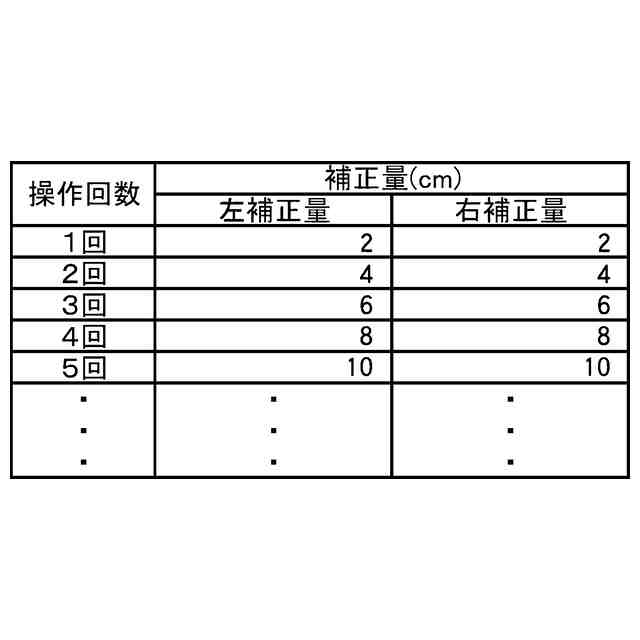
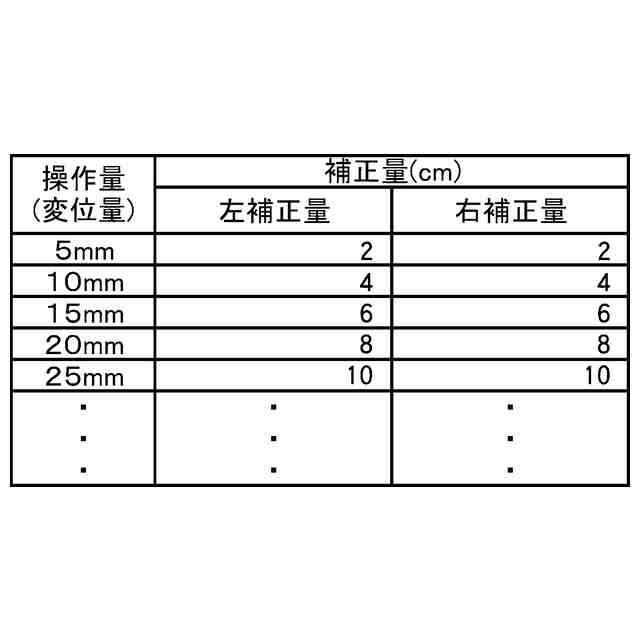
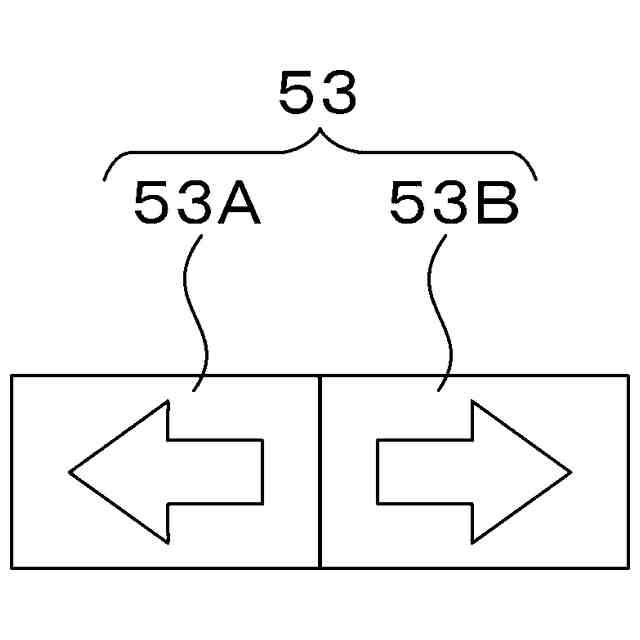
プッシュスイッチにおける補正量を説明する説明図である。
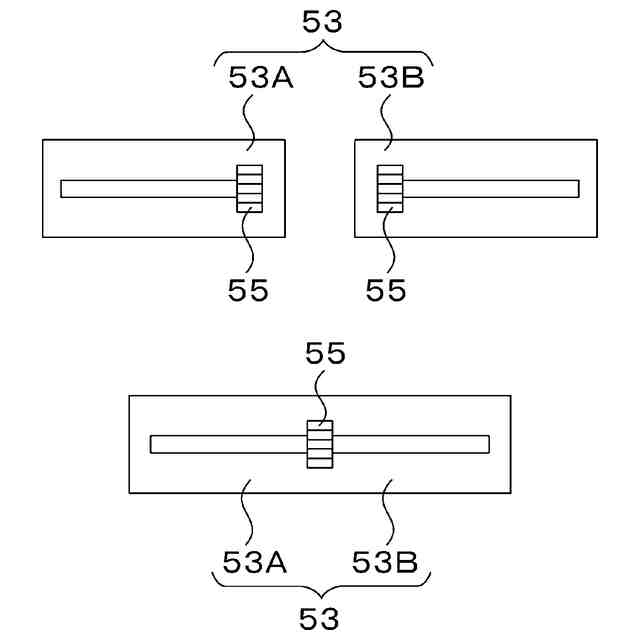
スライドスイッチにおける補正量を説明する説明図である。
プッシュスイッチにおける第1補正部及び第2補正部を示す図である。
スライドスイッチにおける第1補正部及び第2補正部を示す図である。
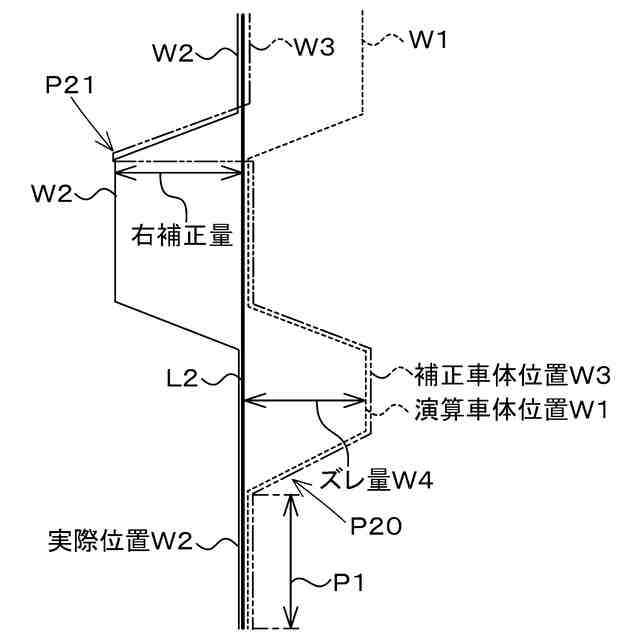
自動操舵中で直進中に演算車体位置が右にずれた場合の状態を示している。
自動操舵中で直進中に演算車体位置が左にずれた場合の状態を示している。
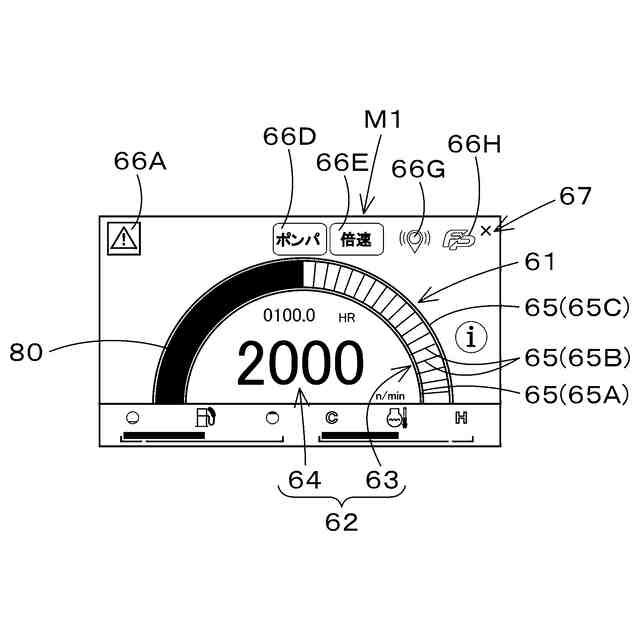
運転画面M1を示す図である。
運転画面M2を示す図である。
走行基準ラインの未設定時の運転画面M2を示す図である。
走行基準ラインの始点の設定後の運転画面M2を示す図である。
走行基準ラインの終点の設定後の運転画面M2を示す図である。
走行の条件を整える際のトラクタの走行を示す図である。
車体を右に操舵する指令を表示したガイダンス画面M3を示す図である。
車体を左に操舵する指令を表示したガイダンス画面M3を示す図である。
車体を真っ直ぐに保持する指令を表示したガイダンス画面M3を示す図である。
車体の直進距離が所定以下である場合のガイダンス画面M3を示す図である。
自動操舵時の運転画面M2を示す図である。
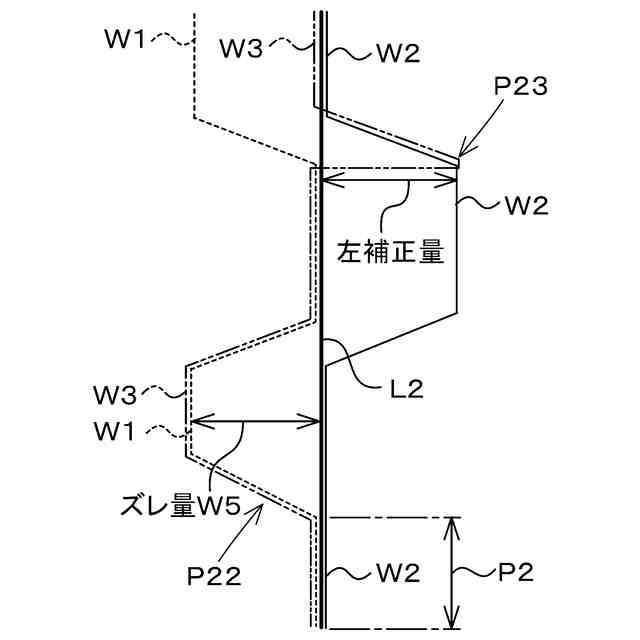
自動操舵時に車体の左側の補正量を設定したときの運転画面M2を示す図である。
自動操舵時に車体の右側の補正量を設定したときの運転画面M2を示す図である。
補正表示部の変形例を示す図である。
設定モードを有効にする前のガイダンス画面M4を示す図である。
走行基準ラインの始点の設定時のガイダンス画面M4を示す図である。
走行基準ラインの終点の設定時のガイダンス画面M4を示す図である。
ウォームアップ中の画面を示す図である。
自動操舵の条件が整った直後のガイダンス画面M4を示す図である。
自動操舵時に車体の左側の補正量を設定したときのガイダンス画面M4を示す図である。
自動操舵時に車体の右側の補正量を設定したときのガイダンス画面M4を示す図である。
自動操舵時に車速が所定以上になった場合のガイダンス画面M4を示す図である。
自動操舵時に車速が零になった場合のガイダンス画面M4を示す図である。
ガイダンス画面M3の変形例を示す図である。
図16A後のガイダンス画面M3を示す図である。
自動操舵を説明する説明図である。
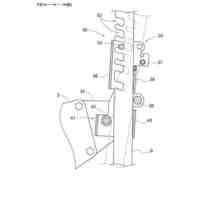
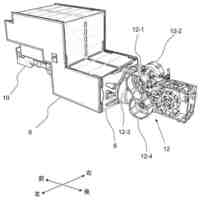
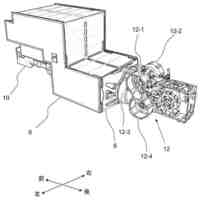
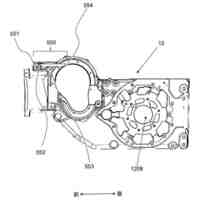
運転席の前方のカバーを運転席側から見た図である。
操舵スイッチを備えた作業車両の変形例における制御ブロック図を示す図である。
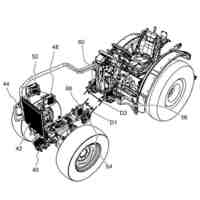
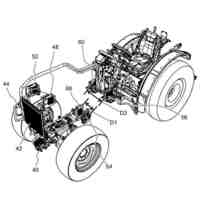
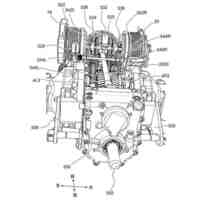
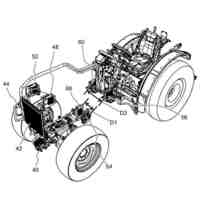
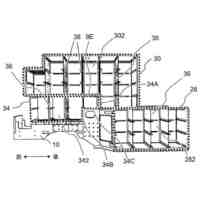
トラクタの全体図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態を図面に基づいて説明する。
<作業車両の概略>
図20は作業車両1の一実施形態を示す側面図であり、図20は作業車両1の一実施形態を示す平面図である。本実施形態の場合、作業車両1はトラクタである。但し、作業車両1は、トラクタに限定されず、コンバインや移植機等の農業機械(農業車両)であってもよいし、ローダ作業機等の建設機械(建設車両)等であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
管継手
今日
株式会社クボタ
水田作業機
5日前
株式会社クボタ
水田作業機
5日前
株式会社クボタ
歩行型作業機
12日前
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタケミックス
電気融着継手
今日
株式会社クボタ
歩行型作業機
12日前
株式会社クボタ
歩行型作業機
12日前
株式会社クボタ
歩行型作業機
12日前
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
電動作業車両
今日
株式会社クボタ
農業支援システム
1日前
株式会社クボタ
農業支援システム
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ