TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025064217
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2023173797
出願日
2023-10-05
発明の名称
放牧支援システム、放牧支援装置、及び放牧支援方法
出願人
株式会社クボタ
代理人
弁理士法人サンクレスト国際特許事務所
主分類
A01K
29/00 20060101AFI20250410BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】放牧場内において家畜を目的の位置に誘導する。
【解決手段】
放牧支援システムは、複数の家畜のそれぞれに装着された複数の位置情報取得装置と、前記複数の家畜を放牧地における特定の領域内に誘導する誘導装置と、放牧支援装置と、を備え、前記放牧支援装置は、前記複数の位置情報取得装置によって取得された前記複数の家畜それぞれの位置情報に基づいて、誘導する対象の家畜を決定する対象決定部と、前記対象の家畜の位置情報及び前記特定の領域の境界線情報に基づいて、前記対象の家畜の位置が前記特定の領域を逸脱するか否かを判定する判定部と、前記対象の家畜の位置が前記特定の領域を逸脱すると判定される場合に、前記対象の家畜を前記特定の領域内に誘導するための移動経路を決定する経路決定部と、前記経路決定部によって決定された前記移動経路を示す移動経路情報を前記誘導装置へ送信する送信部と、を含む。
【選択図】図1
特許請求の範囲
【請求項1】
複数の家畜のそれぞれに装着され、前記複数の家畜のそれぞれの位置を示す位置情報を取得する複数の位置情報取得装置と、
移動することが可能であり、前記複数の家畜を放牧地における特定の領域内に誘導する誘導装置と、
前記誘導装置を管理することにより前記複数の家畜の放牧を支援する放牧支援装置と、
を備え、
前記放牧支援装置は、
前記特定の領域を囲む仮想的な境界線を示す境界線情報を記憶する記憶部と、
前記複数の位置情報取得装置によって取得された前記複数の家畜それぞれの位置情報に基づいて、前記複数の家畜のうち誘導する対象の家畜を決定する対象決定部と、
前記対象の家畜の位置情報及び前記境界線情報に基づいて、前記対象の家畜の位置が前記特定の領域を逸脱するか否か、又は、前記対象の家畜の位置が前記特定の領域を逸脱することが推定されるか否かを判定する判定部と、
前記対象の家畜の位置が前記特定の領域を逸脱する、又は、前記対象の家畜の位置が前記特定の領域を逸脱することが推定されると前記判定部によって判定される場合に、前記対象の家畜を前記特定の領域内に誘導するための前記誘導装置の移動経路を決定する経路決定部と、
前記経路決定部によって決定された前記移動経路を示す移動経路情報を前記誘導装置へ送信する送信部と、
を含む、
放牧支援システム。
続きを表示(約 1,000 文字)
【請求項2】
前記対象の家畜は、前記複数の家畜におけるリーダーである、
請求項1に記載の放牧支援システム。
【請求項3】
前記対象決定部は、前記複数の家畜それぞれの位置の履歴に基づいて、複数の家畜によって形成される家畜群の先頭で移動する家畜を前記リーダーとして決定する、
請求項2に記載の放牧支援システム。
【請求項4】
前記移動経路は、前記特定の領域の外部から前記特定の領域の内部へ向かう方向の経路を含む、
請求項1に記載の放牧支援システム。
【請求項5】
前記移動経路は、前記対象の家畜を中心とした領域であって、人を含む物体が進入すると前記対象の家畜が逃げ始める領域であるフライトゾーンの外部から前記フライトゾーンの内部へ向かう経路を含む、
請求項4に記載の放牧支援システム。
【請求項6】
前記誘導装置は、前記家畜が嗜好する臭気を放出する臭気放出部を含む、
請求項1に記載の放牧支援システム。
【請求項7】
前記特定の領域は、前記特定の領域の内側から外側へ向かって、前記家畜が前記特定の領域を逸脱する可能性が低い部分領域から前記可能性が高い部分領域を含む複数の部分領域に区分けされ、
前記境界線情報は、前記複数の部分領域の情報を含む、
請求項1に記載の放牧支援システム。
【請求項8】
前記誘導装置は、撮像装置を含み、
前記放牧支援装置は、
前記撮像装置が前記放牧地を撮像することによって得られた画像に基づいて、前記放牧地における牧草の状態を判断する状態判断部と、
前記状態判断部によって判断された前記牧草の状態に基づいて、前記特定の領域を変更する領域変更部と、
をさらに含む、
請求項1に記載の放牧支援システム。
【請求項9】
前記牧草の状態は、前記牧草の量を含み、
前記領域変更部は、前記牧草の量が少ない領域から、前記牧草の量が多い領域へ前記特定の領域を変更する、
請求項8に記載の放牧支援システム。
【請求項10】
前記牧草の状態は、前記牧草が前記家畜の飼料に適さない植物であることを含み、
前記領域変更部は、前記家畜の飼料に適さない植物が存在する領域以外の領域へ、前記特定の領域を変更する、
請求項8に記載の放牧支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、放牧支援システム、放牧支援装置、及び放牧支援方法に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
牛、羊、山羊等の家畜の放牧では、一般的に、家畜を放牧地内にとどめるために例えば電気柵が設置される。しかし、広大な放牧地に電気柵を設置すること多大な作業を必要とする。また、放牧地内の一部の区域において家畜が牧草を集中的に摂食すると、その区域における牧草量が少なくなってしまう。
【0003】
特許文献1には、家畜が摂食した位置の履歴に基づいて、牧場内における放牧位置情報を生成し、摂食頻度マップを作業者端末に表示する牧場管理システムが開示されている。この牧場管理システムでは、情報処理装置が、接触頻度マップにおいて、摂食が行われた頻度が高い位置ほど、牧草量が少ないと判定し、牧草量の多い場所に優先的に家畜が位置するような家畜の各々の放牧位置を決定し、当該放牧位置を示す情報を放牧位置情報として生成する。情報処理装置は、放牧位置情報を動作指示としてドローンへ出力する。ドローンは、例えば、家畜の各々を当該放牧位置情報が示す放牧位置へ移動させるように、家畜の各々の誘導を行う。
【先行技術文献】
【特許文献】
【0004】
国際公開第2017/134909号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1には、ドローンがどのようにして家畜を誘導するのかが具体的に記載されていない。ドローンによる誘導が不適切であれば、家畜を計画通りに誘導することができない。
【課題を解決するための手段】
【0006】
本開示の一態様に係る放牧支援システムは、複数の家畜のそれぞれに装着され、前記複数の家畜のそれぞれの位置を示す位置情報を取得する複数の位置情報取得装置と、移動することが可能であり、前記複数の家畜を放牧地における特定の領域内に誘導する誘導装置と、前記誘導装置を管理することにより前記複数の家畜の放牧を支援する放牧支援装置と、を備え、前記放牧支援装置は、前記特定の領域を囲む仮想的な境界線を示す境界線情報を記憶する記憶部と、前記複数の位置情報取得装置によって取得された前記複数の家畜それぞれの位置情報に基づいて、前記複数の家畜のうち誘導する対象の家畜を決定する対象決定部と、前記対象の家畜の位置情報及び前記境界線情報に基づいて、前記対象の家畜の位置が前記特定の領域を逸脱するか否か、又は、前記対象の家畜の位置が前記特定の領域を逸脱することが推定されるか否かを判定する判定部と、前記対象の家畜の位置が前記特定の領域を逸脱する、又は、前記対象の家畜の位置が前記特定の領域を逸脱することが推定されると前記判定部によって判定される場合に、前記対象の家畜を前記特定の領域内に誘導するための前記誘導装置の移動経路を決定する経路決定部と、前記経路決定部によって決定された前記移動経路を示す移動経路情報を前記誘導装置へ送信する送信部と、を含む。
【発明の効果】
【0007】
本開示によれば、放牧場内において家畜を目的の位置に誘導することができる。
【図面の簡単な説明】
【0008】
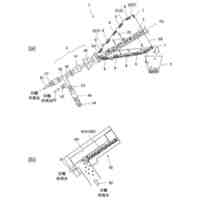
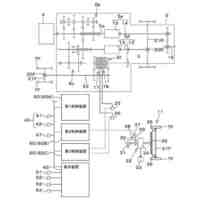
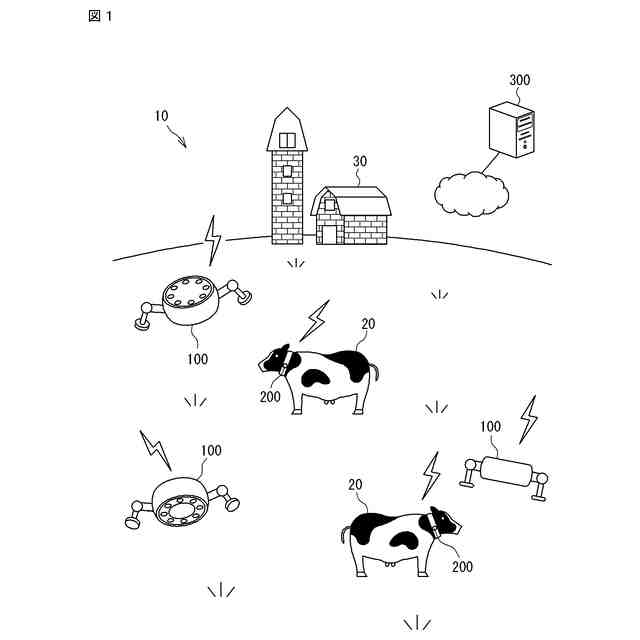
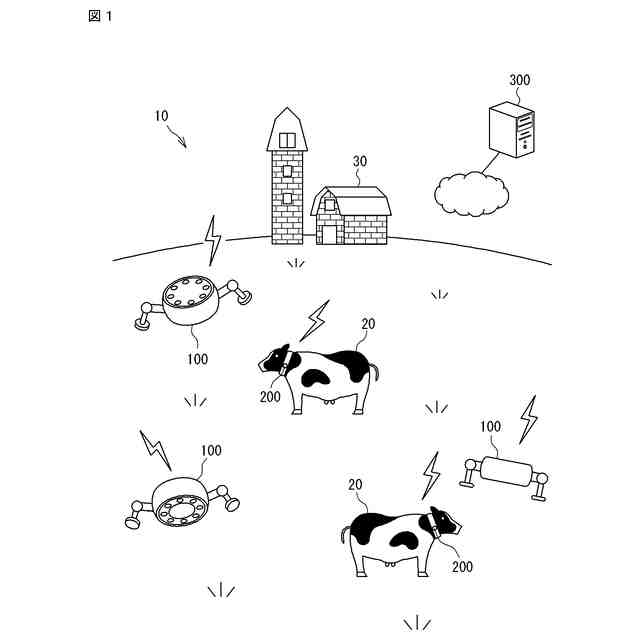
図1は、実施形態に係る放牧支援システムの全体構成の一例を示す図である。
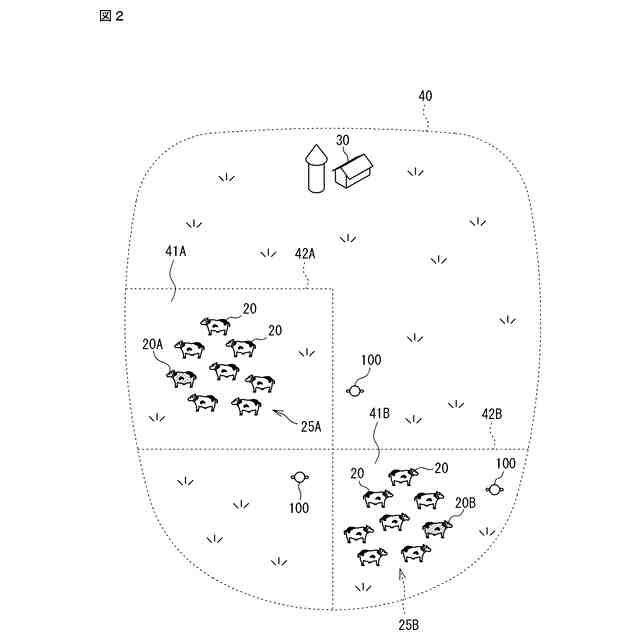
図2は、牛(家畜)の放牧領域の例を示す図である。
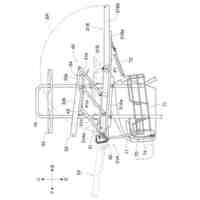
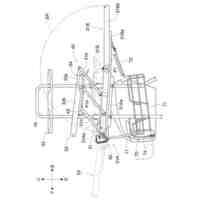
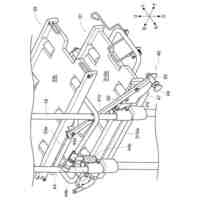
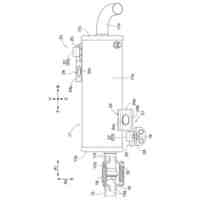
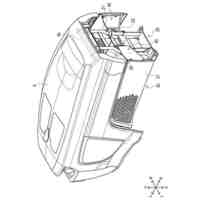
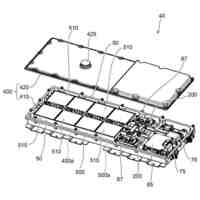
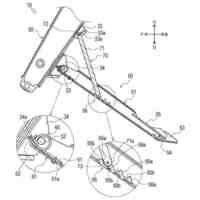
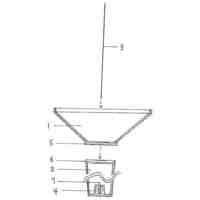
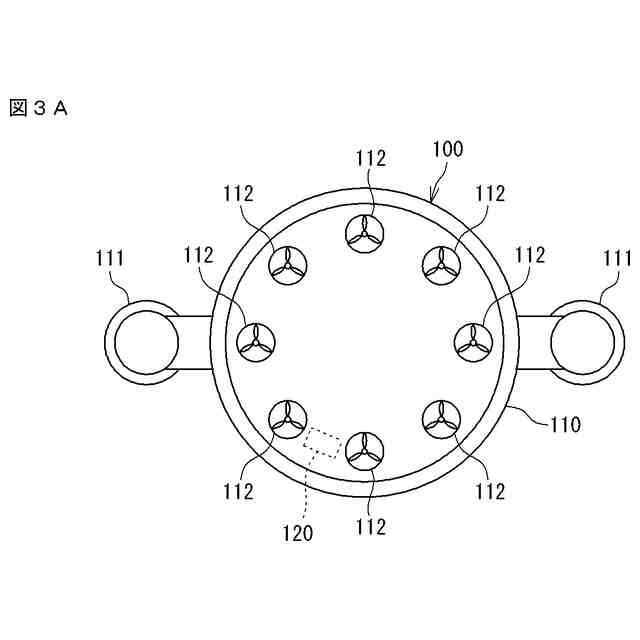
図3Aは、実施形態に係る誘導装置の構成の一例を示す平面図である。
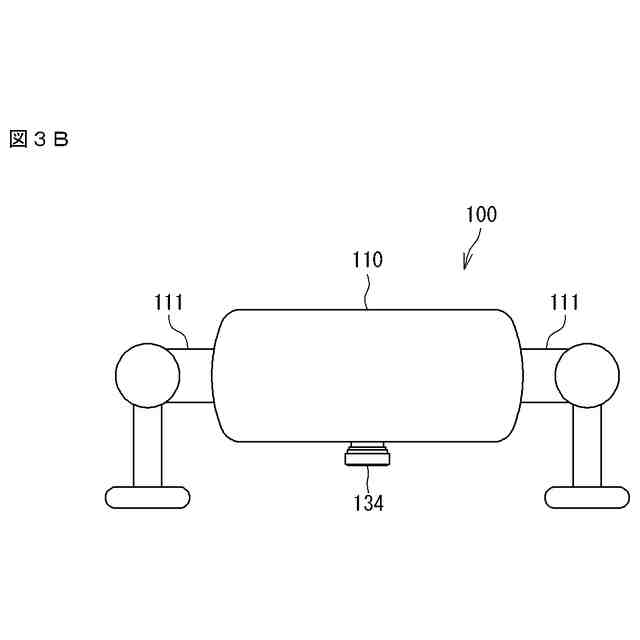
図3Bは、実施形態に係る誘導装置の構成の一例を示す側面図である。
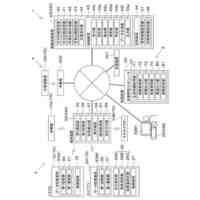
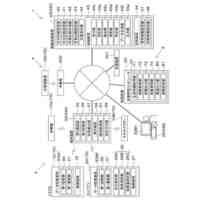
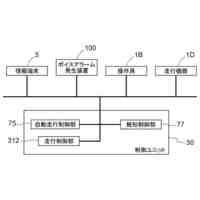
図4は、制御部のハードウェア構成の一例を示すブロック図である。
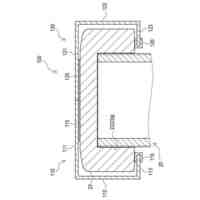
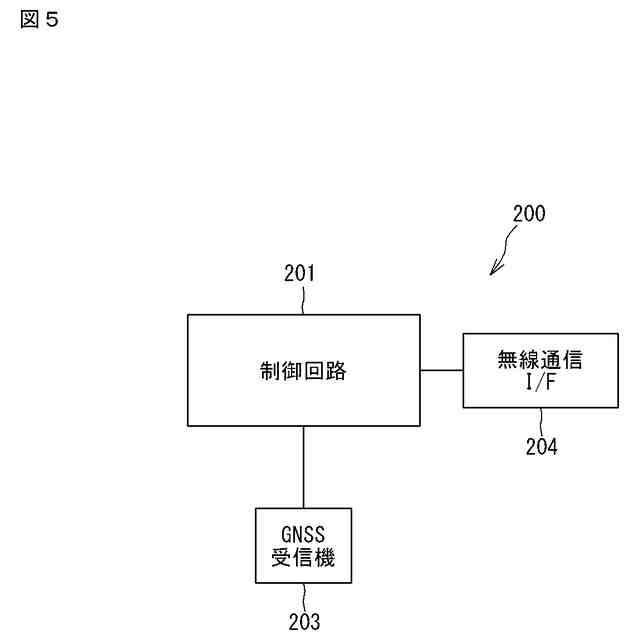
図5は、実施形態に係るタグのハードウェア構成の一例を示すブロック図である。
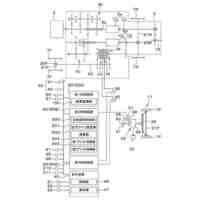
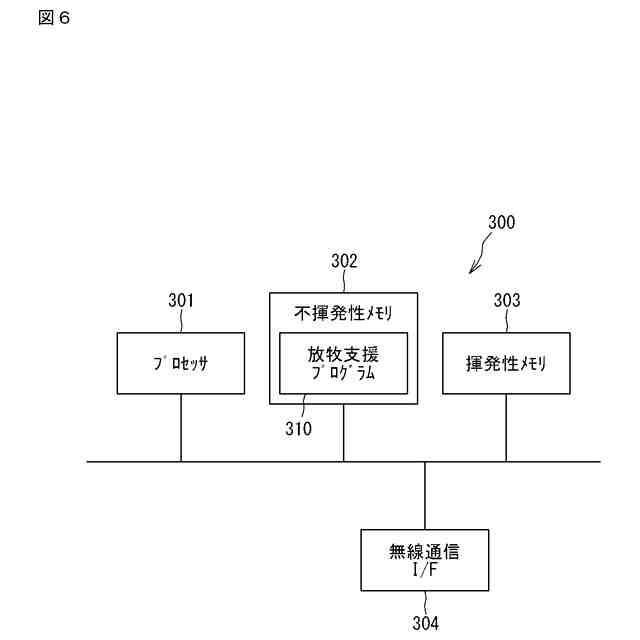
図6は、実施形態に係る放牧支援装置のハードウェア構成の一例を示すブロック図である。
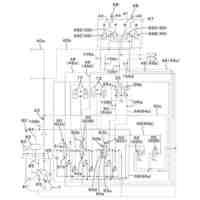
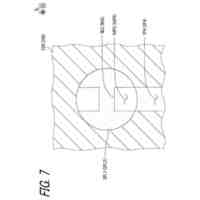
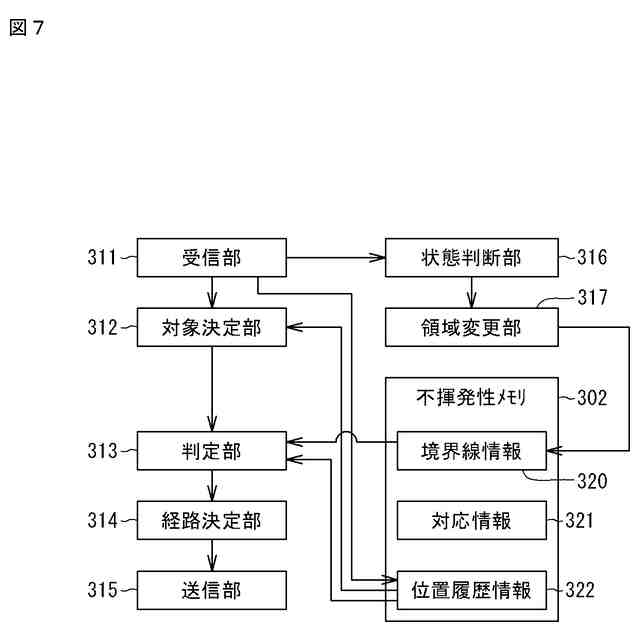
図7は、実施形態に係る放牧支援装置の機能の一例を示す機能ブロック図である。
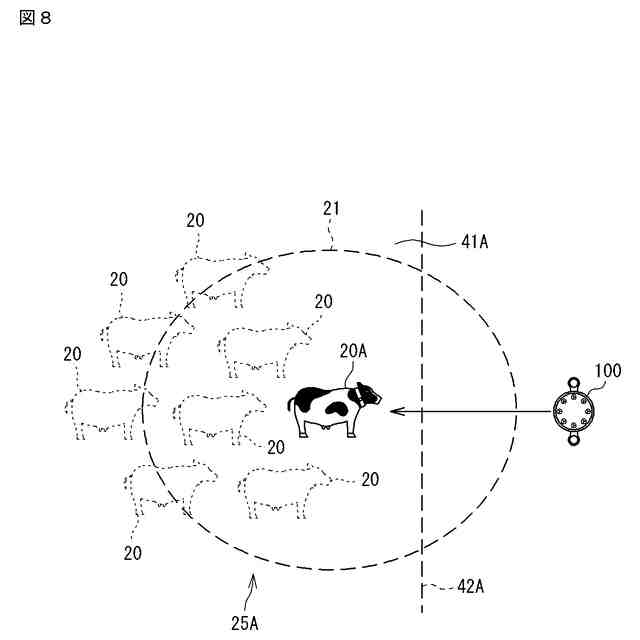
図8は、牛(家畜)の誘導の一例を説明するための図である。
図9は、放牧地における牧草の状態の判断の一例を説明するための図である。
図10は、実施形態に係る放牧支援システム10による家畜の誘導動作の一例を示すシーケンス図である。
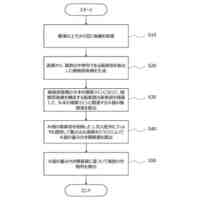
図11は、実施形態に係る放牧支援装置による放牧地の牧草状態判断処理の一例を示すフローチャートである。
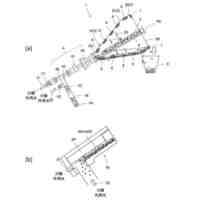
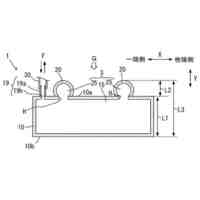
図12は、第1変形例に係る誘導装置の構成を示す側面図である。
図13は、第1変形例に係る誘導装置による牛(家畜)の誘導の一例を説明するための図である。
図14は、第2変形例に係る境界線情報の内容を示す図である。
【発明を実施するための形態】
【0009】
<本開示の実施形態の概要>
以下、本開示の実施形態の概要を列記して説明する。
【0010】
(1) 本実施形態に係る放牧支援システムは、複数の家畜のそれぞれに装着され、前記複数の家畜のそれぞれの位置を示す位置情報を取得する複数の位置情報取得装置と、移動することが可能であり、前記複数の家畜を放牧地における特定の領域内に誘導する誘導装置と、前記誘導装置を管理することにより前記複数の家畜の放牧を支援する放牧支援装置と、を備え、前記放牧支援装置は、前記特定の領域を囲む仮想的な境界線を示す境界線情報を記憶する記憶部と、前記複数の位置情報取得装置によって取得された前記複数の家畜それぞれの位置情報に基づいて、前記複数の家畜のうち誘導する対象の家畜を決定する対象決定部と、前記対象の家畜の位置情報及び前記境界線情報に基づいて、前記対象の家畜の位置が前記特定の領域を逸脱するか否か、又は、前記対象の家畜の位置が前記特定の領域を逸脱することが推定されるか否かを判定する判定部と、前記対象の家畜の位置が前記特定の領域を逸脱する、又は、前記対象の家畜の位置が前記特定の領域を逸脱することが推定されると前記判定部によって判定される場合に、前記対象の家畜を前記特定の領域内に誘導するための前記誘導装置の移動経路を決定する経路決定部と、前記経路決定部によって決定された前記移動経路を示す移動経路情報を前記誘導装置へ送信する送信部と、を含む。これにより、誘導に適した対象の家畜を決定し、誘導装置によって対象の家畜を誘導することで、放牧場内において複数の家畜を目的の位置に誘導することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
田植機
1か月前
株式会社クボタ
作業機
11日前
株式会社クボタ
田植機
1か月前
株式会社クボタ
田植機
1か月前
株式会社クボタ
作業車
4日前
株式会社クボタ
カバー
14日前
株式会社クボタ
作業車
14日前
株式会社クボタ
作業車
14日前
株式会社クボタ
比重分離装置
18日前
株式会社クボタ
比重分離装置
18日前
株式会社クボタ
比重分離装置
18日前
株式会社クボタ
比重分離装置
18日前
株式会社クボタ
バッテリパック
19日前
株式会社クボタ
バッテリパック
19日前
株式会社クボタ
農業管理システム
11日前
株式会社クボタ
農業管理システム
11日前
株式会社クボタ
フロントローダ及び作業車両
4日前
株式会社クボタ
管支持装置及び管支持装置の設置方法
4日前
株式会社クボタ
農業支援システムおよび作物列の検出方法
13日前
株式会社クボタ建設
弁の漏水防止装置、弁および弁の漏水防止方法
19日前
株式会社クボタ
バッテリパックのハウジングおよびバッテリパック
19日前
株式会社クボタ
放牧支援システム、放牧支援装置、及び放牧支援方法
4日前
株式会社クボタ
作業機
11日前
株式会社クボタ
作業車両
6日前
株式会社クボタ
トラクタ
11日前
株式会社クボタ
作業車両
11日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両、作業車両の制御方法、及び、作業車両のコントローラ
26日前
株式会社クボタ
作業車両、作業車両の制御方法、及び、作業車両のコントローラ
26日前
個人
昆虫捕獲器
6日前
個人
トラップタワー
5日前
井関農機株式会社
作業車両
14日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
収穫作業機
11日前
個人
プランターシーブ
13日前
個人
ペット用デンタルおもちゃ
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ