TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025041473
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2023148801
出願日
2023-09-13
発明の名称
作業車両、作業車両の制御方法、及び、作業車両のコントローラ
出願人
株式会社クボタ
代理人
個人
,
個人
,
個人
主分類
E02F
3/43 20060101AFI20250318BHJP(水工;基礎;土砂の移送)
要約
【課題】インプルメント上昇時に行う油圧回路による水平制御と同様の水平制御を電気的に実現する。
【解決手段】作業車両は、第1対応関係において開始アーム高さを表す第1姿勢パラメータに関連づけられた第2姿勢パラメータである第1参照パラメータを取得するプロセッサを備える。プロセッサは、アーム姿勢検出センサの出力からアーム高さの計測値を求め、第1対応関係において計測値を表す第1姿勢パラメータに関連づけられた第2姿勢パラメータである第2参照パラメータを取得する。プロセッサは、アーム高さが計測値となるときのインプルメント向きの目標である目標向きを表す第2姿勢パラメータと開始インプルメント向きを表す第2姿勢パラメータとの差が第2参照パラメータと第1参照パラメータとの差と等しくなるように目標向きを決定し、インプルメント向きが目標向きに近づくように第1スプール位置を制御する。
【選択図】図8
特許請求の範囲
【請求項1】
ジョイントと前記ジョイントと反対のインプルメント先端とを含むインプルメントと、
前記ジョイントを含み、前記インプルメントを揺動可能に支持するアーム先端と前記アーム先端と反対のアーム基端とを含むアームと、
前記アーム基端を揺動可能に支持する車両本体と、
前記車両本体を移動させるための走行装置と、
前記ジョイントから前記インプルメント先端に向かうインプルメント向きを制御するように構成される第1油圧シリンダと、
前記走行装置の進行方向に対して垂直な高さ方向において、前記走行装置の接地面に対する前記アーム先端の高さであるアーム高さを制御するように構成される第2油圧シリンダと、
前記第1油圧シリンダと前記第2油圧シリンダとに作動油を供給するように構成される油圧ポンプと、
前記油圧ポンプを駆動させるように構成されるエンジンと、
前記エンジンの被検出回転速度を検出するための回転速度検出センサと、
第1スプールを有し、前記第1スプールの位置である第1スプール位置に応じて前記第1油圧シリンダの2つの油室の各々を、前記作動油を供給する第1被供給油室と前記作動油を排出する第1被排出油室とに二者択一的に切り替え、前記第1スプール位置に応じて前記第1被供給油室に対する単位時間あたりの前記作動油の供給量と前記第1被排出油室からの単位時間あたりの前記作動油の排出量を調整するように構成される第1制御弁と、
前記アーム高さを検出するためのアーム姿勢検出センサと、
前記インプルメント向きを検出するためのインプルメント姿勢検出センサと、
前記アーム高さを表す第1姿勢パラメータと前記インプルメント向きを表す第2姿勢パラメータとが関連づけられた第1対応関係を記憶する記憶装置と、
前記油圧ポンプと前記エンジンと前記第1制御弁とを制御するように構成されるプロセッサと、
前記インプルメント向きを制御するインプルメント姿勢電気制御を行うための第1指示を受け付けるように構成される第1入力装置と、
前記アーム高さを変更するための第2指示を受け付けるように構成される第2入力装置と、を備え、
前記プロセッサは、
前記第1指示が受け付けられた後、前記第2指示が受け付けられた時点での前記アーム高さである開始アーム高さを表す前記第1姿勢パラメータを前記アーム姿勢検出センサの出力から算出し、
前記第1指示が受け付けられた後、前記第2指示が受け付けられた時点での前記インプルメント向きである開始インプルメント向きを表す前記第2姿勢パラメータを前記インプルメント姿勢検出センサの出力から算出し、
前記第1対応関係において前記開始アーム高さを表す前記第1姿勢パラメータに関連づけられた前記第2姿勢パラメータである第1参照パラメータを取得し、
前記第2指示に従って前記第2油圧シリンダを制御し、
前記アーム姿勢検出センサの出力から前記アーム高さの計測値を求め、
前記第1対応関係において前記計測値を表す前記第1姿勢パラメータに関連づけられた前記第2姿勢パラメータである第2参照パラメータを取得し、
前記アーム高さが前記計測値となるときの前記インプルメント向きの目標である目標向きを表す前記第2姿勢パラメータと前記開始インプルメント向きを表す前記第2姿勢パラメータとの差が前記第2参照パラメータと前記第1参照パラメータとの差と等しくなるように前記目標向きを決定し、
前記インプルメント向きが前記目標向きに近づくように前記第1スプール位置を制御する、
作業車両。
続きを表示(約 4,000 文字)
【請求項2】
前記第1対応関係において、前記エンジンの回転速度が第1回転速度で回転されるときの、前記第1姿勢パラメータと前記第2姿勢パラメータとが関連づけられており、
前記記憶装置は、前記第1回転速度とは異なる少なくとも1つの回転速度で前記エンジンがそれぞれ駆動されている状態で前記インプルメント姿勢電気制御を行うときの、前記第1姿勢パラメータと前記第2姿勢パラメータとが関連づけられた少なくとも1つの第2対応関係を記憶しており、
前記プロセッサは、
前記エンジンの前記被検出回転速度に基づいて、前記第1対応関係と前記少なくとも1つの第2対応関係から参照される参照対応関係を決定し、
前記参照対応関係において前記開始アーム高さを表す前記第1姿勢パラメータに関連づけられた前記第2姿勢パラメータである第3参照パラメータを取得し、
前記参照対応関係において前記計測値を表す前記第1姿勢パラメータに関連づけられた前記第2姿勢パラメータである第4参照パラメータを取得し、
前記目標向きを表す前記第2姿勢パラメータと前記開始インプルメント向きを表す前記第2姿勢パラメータとの差が前記第4参照パラメータと前記第3参照パラメータとの差と等しくなるように前記目標向きを決定するように、前記第1スプール位置を制御する、
請求項1に記載の作業車両。
【請求項3】
前記第1油圧シリンダと前記油圧ポンプとを前記第1制御弁を介して接続する第1シリンダ油圧回路と、
第2スプールを有し、前記第2スプールの位置である第2スプール位置に応じて前記第2油圧シリンダの2つの油室の各々を、前記作動油を供給する第2被供給油室と前記作動油を排出する第2被排出油室とに二者択一的に切り替え、前記第2スプール位置に応じて前記第2被供給油室に対する単位時間あたりの前記作動油の供給量と前記第2被排出油室からの単位時間あたりの前記作動油の排出量を調整するように構成される第2制御弁と、
前記第2油圧シリンダと前記油圧ポンプとを前記第2制御弁を介して接続する第2シリンダ油圧回路と、
前記第1制御弁と前記油圧ポンプとの間の前記第1シリンダ油圧回路に設けられた第1圧力補償弁と前記第2制御弁と前記油圧ポンプとの間の前記第2シリンダ油圧回路に設けられた第2圧力補償弁とを含む圧力制御機構と、
をさらに備え、
前記第1制御弁は、前記第1被供給油室と前記第1制御弁とを接続する油路と前記油圧ポンプと前記第1制御弁とを接続する油路とを連通する第1開口の面積である第1開口面積を前記第1スプール位置に応じて変化させるように構成され、
前記第2制御弁は、前記第2被供給油室と前記第2制御弁とを接続する油路と、前記油圧ポンプと前記第2制御弁とを接続する油路とを連通する前記第2制御弁の第2開口の面積である第2開口面積を前記第2スプール位置に応じて変化させるように構成され、
前記圧力制御機構は、前記第1開口から出力される前記作動油の油圧が、前記第1開口に入力される前記作動油の油圧よりも第1圧力だけ低くなるように制御し、前記第2開口から出力される前記作動油の油圧が、前記第2開口に入力される前記作動油の油圧よりも前記第1圧力だけ低くなるように制御するように制御し、
前記プロセッサは、
前記第2指示に従って前記第2スプール位置を決定し、
前記第2スプールの位置が決定した前記第2スプール位置となるように前記第2スプールを制御し、
決定した前記第2スプール位置に基づいて、前記第2開口面積を求め、
前記第1開口面積を、前記第2開口面積を予め定められた比で掛けた第1参照面積とするように決定し、
前記第1開口面積を前記第1参照面積に近づくように前記第1スプールを制御することによって前記インプルメント向きを前記目標向きに近づける、
請求項1または2に記載の作業車両。
【請求項4】
前記記憶装置は、前記エンジンの回転速度と補正ゲインとの第3対応関係を記憶しており、
前記プロセッサは、
前記回転速度検出センサから検出された前記エンジンの被検出回転速度を取得し、
前記第3対応関係に基づいて、前記エンジンの前記被検出回転速度に対応する前記補正ゲインを決定し、
前記第1開口面積を、前記第1参照面積と前記補正ゲインの積である第2参照面積とするように決定する、請求項3に記載の作業車両。
【請求項5】
前記プロセッサは、
前記インプルメント姿勢検出センサによって検出された前記第2姿勢パラメータである被検出値を取得し、
前記被検出値の前記目標向きを表す前記第2姿勢パラメータからのずれが第1閾値以上であるとき、前記ずれを小さくするように前記第1スプール位置をフィードバック制御する、請求項1または2に記載の作業車両。
【請求項6】
前記プロセッサは、
前記インプルメント姿勢検出センサによって検出された前記第2姿勢パラメータである被検出値を取得し、
前記被検出値の前記目標向きを表す前記第2姿勢パラメータからのずれが第1閾値以上であるとき、前記ずれを小さくするように、前記第1開口面積を、前記第1参照面積から第3参照面積にするようにフィードバック制御する、
請求項3に記載の作業車両。
【請求項7】
前記プロセッサは、
前記インプルメント姿勢検出センサから検出された前記第2姿勢パラメータである被検出値を取得し、
前記被検出値の前記目標向きを表す前記第2姿勢パラメータからのずれが第1閾値以上であるとき、前記ずれを小さくするように、前記第1開口面積を、前記第2参照面積から第3参照面積にするようにフィードバック制御する、
請求項4に記載の作業車両。
【請求項8】
前記プロセッサは、
前記ずれが前記第1閾値以上になったことにより、前記第1開口面積を前記フィードバック制御した結果、前記ずれが前記第1閾値より小さい第2閾値以下となったとき、前記フィードバック制御を終了し、
前記第3参照面積を前記第1参照面積で割った補正係数を算出し、
前記フィードバック制御を終了した後に決定される第1参照面積と前記補正係数との積を、前記フィードバック制御を終了した後の前記第1開口面積とするように決定する、
請求項6に記載の作業車両。
【請求項9】
前記プロセッサは、
前記ずれが前記第1閾値以上になったことにより、前記第1開口面積を前記フィードバック制御した結果、前記ずれが前記第1閾値より小さい第2閾値以下となったとき、前記フィードバック制御を終了し、
前記第3参照面積を前記第2参照面積で割った補正係数を算出し、
前記第1開口面積を、前記第1参照面積と前記補正ゲインと前記補正係数との積である第4参照面積とするように決定する、
請求項7に記載の作業車両。
【請求項10】
前記インプルメント先端を下方にチルトさせるときに前記作動油が流入する前記第1油圧シリンダの第1室と前記油圧ポンプとを前記第1制御弁を介して接続する第1油路と、
前記インプルメント先端を上方にチルトさせるときに前記作動油が流入する前記第1油圧シリンダの第2室と前記第1制御弁とを接続する第2油路と、
前記アーム先端を上昇させるときに前記作動油が流入する前記第2油圧シリンダの第3室と前記油圧ポンプとを前記第2制御弁を介して接続する第3油路と、
前記アーム先端を下降させるときに前記作動油が流入する前記第2油圧シリンダの第4室と前記第2制御弁とを接続する第4油路と、
前記第4油路と前記第1油路とを接続するように構成されるバイパス油路と、
前記バイパス油路による前記第4油路と前記第1油路との接続と切断とを制御するように構成される切替機構と、
をさらに備え、
前記切替機構は、
前記バイパス油路と前記第4油路とを接続する第1ジョイントと前記第2制御弁との間の前記第4油路に設けられ、第1パイロットポートを有し、前記第1パイロットポートに第1閾値圧以上のパイロット油の圧力が加えられると、前記第4油路を介した前記第2制御弁と前記第4室との接続を遮断し、前記第1パイロットポートに第1閾値圧より小さいパイロット油の圧力が加えられると、前記第4油路を介して前記第2制御弁と前記第4室とを接続するように構成された第1切替弁と、
前記第1パイロットポートに前記第1閾値圧以上のパイロット圧をかけることが可能な油路と前記第1パイロットポートとを接続する第1位置と前記第1パイロットポートと作動油タンクとを連通させる第2位置とに切り換え可能な電磁弁と、
を備え、
前記第1入力装置は、油圧回路の接続関係を変更することによって前記インプルメント向きを制御するインプルメント姿勢機械制御を行うための第3指示を受け付けるように構成され、
前記プロセッサは、前記第3指示が受け付けられ、前記アーム高さを大きくする前記第2指示が受け付けられたときに、前記第4油路と前記第1油路とを接続させるように前記切替機構を制御する、
請求項1に記載の作業車両。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両、作業車両の制御方法、及び、作業車両のコントローラに関する。
続きを表示(約 5,500 文字)
【背景技術】
【0002】
特許文献1は、ジョイスティックによって電気的に入力されたバケットやアームの姿勢変更指示に対して、バケットの位置がアームによって変更されても地面に対するバケットの姿勢が変わらないようにするバケットの水平制御を開示している。特許文献2は、操作弁によって入力されたバケットやアームの姿勢変更指示に対して、アームシリンダから排出される作動油の一部をバケットシリンダに送るように油圧回路を制御することによって、上述の水平制御を実現する作業車両を記載している。
【先行技術文献】
【特許文献】
【0003】
国際公開第94/26,988号
米国特許第11,655,615号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に係る作業車両は、バケットやアームのシリンダに作動油を供給するバルブを電気信号のみで制御している。特許文献2に係る作業車両は、バケットを上げる動作に対して油圧回路による水平制御を実現しているが、バケットを下げる動作には水平制御を行うことが出来なかった。
【0005】
本願に開示される技術は、バケットを上げる動作には、油圧回路によって水平制御を実現するとともに、バケットを下げる動作には、他の手段によって水平制御を実現できる作業車両、作業車両の制御方法、及び、作業車両のコントローラを提供することにある。
【課題を解決するための手段】
【0006】
本開示の第1態様に係る作業車両は、インプルメントと、アームと、車両本体と、走行装置と、第1油圧シリンダと、第2油圧シリンダと、油圧ポンプと、エンジンと、回転速度検出センサと、第1制御弁と、アーム姿勢検出センサと、インプルメント姿勢検出センサと、記憶装置と、プロセッサと、第1入力装置と、第2入力装置と、を備える。インプルメントは、ジョイントとジョイントと反対のインプルメント先端とを含む。アームは、ジョイントを含み、インプルメントを揺動可能に支持するアーム先端とアーム先端と反対のアーム基端とを含む。車両本体は、アーム基端を揺動可能に支持する。走行装置は、車両本体を移動させるように構成される。第1油圧シリンダは、ジョイントからインプルメント先端に向かうインプルメント向きを制御するように構成される。第2油圧シリンダは、走行装置の進行方向に対して垂直な高さ方向において、走行装置の接地面に対するアーム先端の高さであるアーム高さを制御するように構成される。油圧ポンプは、第1油圧シリンダと第2油圧シリンダとに作動油を供給するように構成される。エンジンは、油圧ポンプを回転させるように構成される。回転速度検出センサは、エンジンの被検出回転速度を検出するように構成される。第1制御弁は、第1スプールを有し、第1スプールの位置である第1スプール位置に応じて第1油圧シリンダの2つの油室の各々を、作動油を供給する第1被供給油室と作動油を排出する第1被排出油室とに二者択一的に切り替え、第1スプール位置に応じて第1被供給油室に対する単位時間あたりの作動油の供給量と第1被排出油室からの単位時間あたりの作動油の排出量を調整するように構成される。アーム姿勢検出センサは、アーム高さを検出するように構成される。インプルメント姿勢検出センサは、インプルメント向きを検出するように構成される。記憶装置は、アーム高さを表す第1姿勢パラメータとインプルメント向きを表す第2姿勢パラメータとが関連づけられた第1対応関係を記憶するように構成される。プロセッサは、油圧ポンプとエンジンと第1制御弁とを制御するように構成される。第1入力装置は、インプルメント向きを制御するインプルメント姿勢電気制御を行うための第1指示を受け付けるように構成される。第2入力装置は、アーム高さを変更するための第2指示を受け付けるように構成される。プロセッサは、第1指示が受け付けられた後、第2指示が受け付けられた時点でのアーム高さである開始アーム高さを表す第1姿勢パラメータをアーム姿勢検出センサの出力から算出する。プロセッサは、第1指示が受け付けられた後、第2指示が受け付けられた時点でのインプルメント向きである開始インプルメント向きを表す第2姿勢パラメータをインプルメント姿勢検出センサの出力から算出する。プロセッサは、第1対応関係において開始アーム高さを表す第1姿勢パラメータに関連づけられた第2姿勢パラメータである第1参照パラメータを取得する。プロセッサは、第2指示に従って第2油圧シリンダを制御する。プロセッサは、アーム姿勢検出センサの出力からアーム高さの計測値を求める。プロセッサは、第1対応関係において計測値を表す第1姿勢パラメータに関連づけられた第2姿勢パラメータである第2参照パラメータを取得する。プロセッサは、アーム高さが計測値となるときのインプルメント向きの目標である目標向きを表す第2姿勢パラメータと開始インプルメント向きを表す第2姿勢パラメータとの差が第2参照パラメータと第1参照パラメータとの差と等しくなるように目標向きを決定する。プロセッサは、インプルメント向きが目標向きに近づくように第1スプール位置を制御する。
【0007】
本開示の第2態様に係る作業車両の制御方法は、作業車両の走行装置の接地面に対する高さであるアーム高さを表す第1姿勢パラメータとインプルメントのジョイントからインプルメント先端が向かうインプルメント向きを表す第2姿勢パラメータとが関連づけられた第1対応関係に基づいてインプルメント向きを制御するインプルメント姿勢電気制御を行うための第1指示を受け付けることと、アーム高さを変更するための第2指示を受け付けることとを含む。当該制御方法は、第1指示が受け付けられた後、第2指示が受け付けられた時点でのアーム高さである開始アーム高さを表す第1姿勢パラメータを、アーム高さを検出するように構成されるアーム姿勢検出センサの出力から算出することと、第1指示が受け付けられた後、第2指示が受け付けられた時点でのインプルメント向きである開始インプルメント向きを表す第2姿勢パラメータを、インプルメント向きを検出するように構成されるインプルメント姿勢検出センサの出力から算出することとを含む。当該制御方法は、第1対応関係において開始アーム高さを表す第1姿勢パラメータに関連づけられた第2姿勢パラメータである第1参照パラメータを取得することと、第2指示に従ってアーム高さを制御するように構成される第2油圧シリンダを制御することと、アーム高さを検出するためのアーム姿勢検出センサの出力からアーム高さの計測値を求めることと、第1対応関係において計測値を表す第1姿勢パラメータに関連づけられた第2姿勢パラメータである第2参照パラメータを取得することとを含む。当該制御方法は、アーム高さが計測値となるときのインプルメント向きの目標である目標向きを表す第2姿勢パラメータと開始インプルメント向きを表す第2姿勢パラメータとの差が第2参照パラメータと第1参照パラメータとの差と等しくなるように目標向きを決定することを含む。当該制御方法は、第1スプールを有し、第1スプールの位置である第1スプール位置に応じて第1油圧シリンダの2つの油室の各々を、作動油を供給する第1被供給油室と作動油を排出する第1被排出油室とに二者択一的に切り替え、第1スプール位置に応じて第1被供給油室に対する単位時間あたりの作動油の供給量と第1被排出油室からの単位時間あたりの作動油の排出量を調整するように構成される第1制御弁の第1スプール位置を、インプルメント向きが目標向きに近づくように制御することを含む。
【0008】
本開示の第3態様に係る作業車両のコントローラは、記憶装置とプロセッサとを含む。記憶装置は、作業車両の走行装置の接地面に対する高さであるアーム高さを表す第1姿勢パラメータとインプルメントのジョイントからインプルメント先端が向かうインプルメント向きを表す第2姿勢パラメータとが関連づけられた第1対応関係を記憶するように構成される。プロセッサは、第1対応関係に基づいてインプルメント向きを制御するインプルメント姿勢電気制御を行うための第1指示を第1入力装置から受けとり、アーム高さを変更するための第2指示を第2入力装置から受けとるように構成される。プロセッサは、第1指示が受け付けられた後、第2指示が受け付けられた時点でのアーム高さである開始アーム高さを表す第1姿勢パラメータを、アーム高さを検出するように構成されるアーム姿勢検出センサの出力から算出し、第1指示が受け付けられた後、第2指示が受け付けられた時点でのインプルメント向きである開始インプルメント向きを表す第2姿勢パラメータを、インプルメント向きを検出するように構成されるインプルメント姿勢検出センサの出力から算出するように構成される。プロセッサは、第1対応関係において開始アーム高さを表す第1姿勢パラメータに関連づけられた第2姿勢パラメータである第1参照パラメータを取得し、第2指示に従ってアーム高さを制御するように構成される第2油圧シリンダを制御し、アーム高さを検出するためのアーム姿勢検出センサの出力を受け取り、アーム高さの計測値を求め、第1対応関係において計測値を表す第1姿勢パラメータに関連づけられた第2姿勢パラメータである第2参照パラメータを取得するように構成される。プロセッサは、アーム高さが計測値となるときのインプルメント向きの目標である目標向きを表す第2姿勢パラメータと開始インプルメント向きを表す第2姿勢パラメータとの差が第2参照パラメータと第1参照パラメータとの差と等しくなるように目標向きを決定するように構成される。プロセッサは、第1スプールを有し、第1スプールの位置である第1スプール位置に応じて第1油圧シリンダの2つの油室の各々を、作動油を供給する第1被供給油室と作動油を排出する第1被排出油室とに二者択一的に切り替え、第1スプール位置に応じて第1被供給油室に対する単位時間あたりの作動油の供給量と第1被排出油室からの単位時間あたりの作動油の排出量を調整するように構成される第1制御弁の第1スプール位置を、インプルメント向きが目標向きに近づくように制御するように構成される。
【発明の効果】
【0009】
本願に開示される技術によれば、例えば、バケットを上げる動作には油圧回路によって水平制御を実現するとともに、バケットを下げる動作には他の手段によって水平制御を実現できる作業車両、作業車両の制御方法、及び、作業車両のコントローラを提供することができる。
【図面の簡単な説明】
【0010】
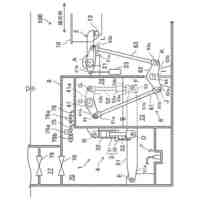
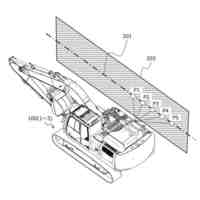
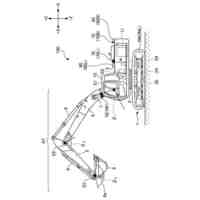
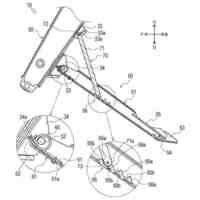
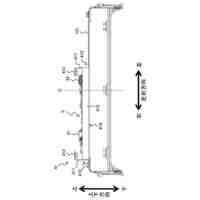
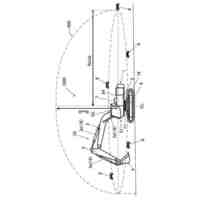
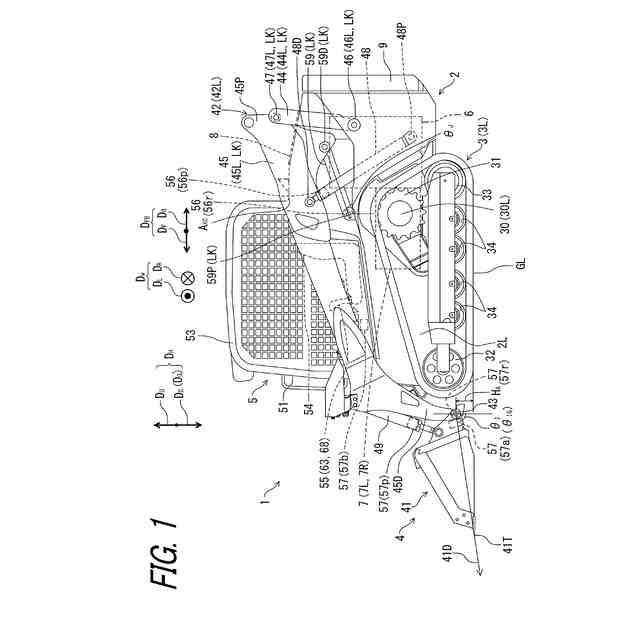
図1は、作業車両の側面図である。
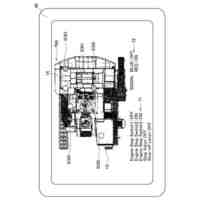
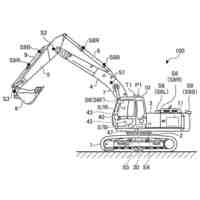
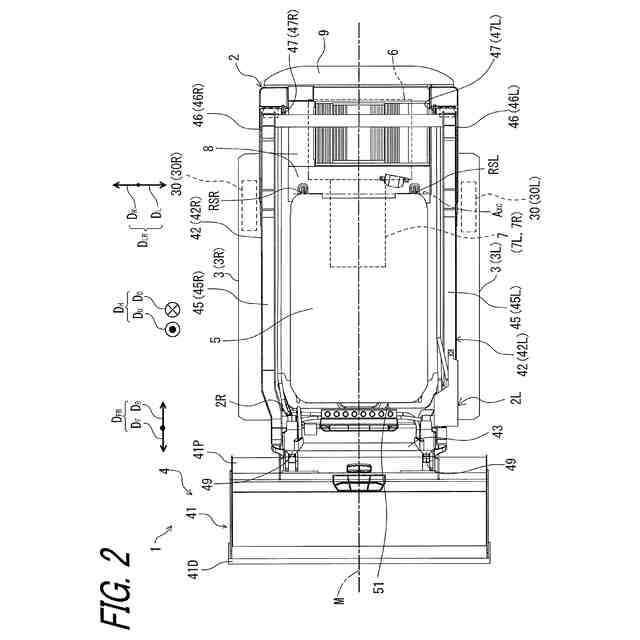
図2は、作業車両の上面図である。
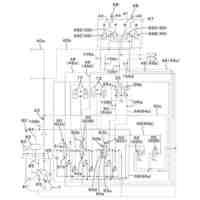
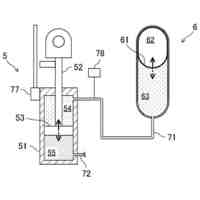
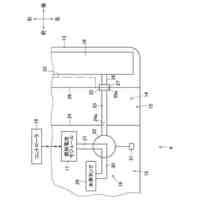
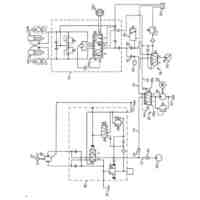
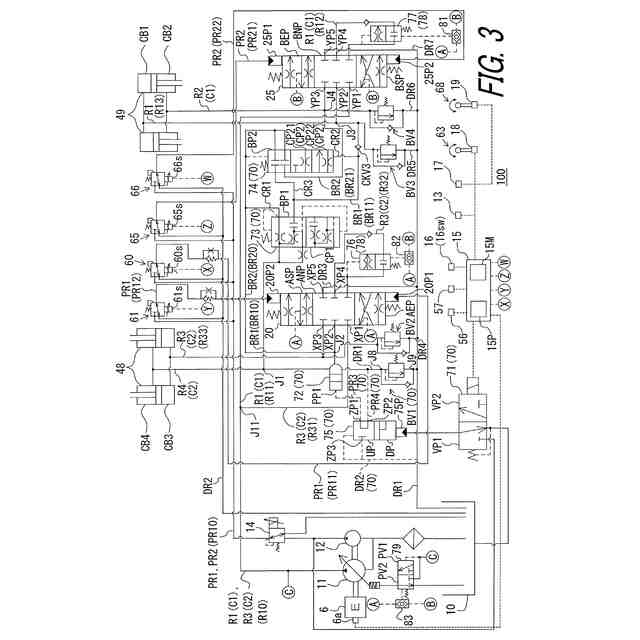
図3は、作業車両の第1油圧シリンダと第2油圧シリンダと油圧回路との概略構成図である。
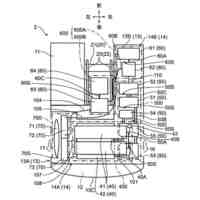
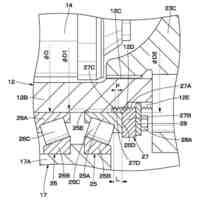
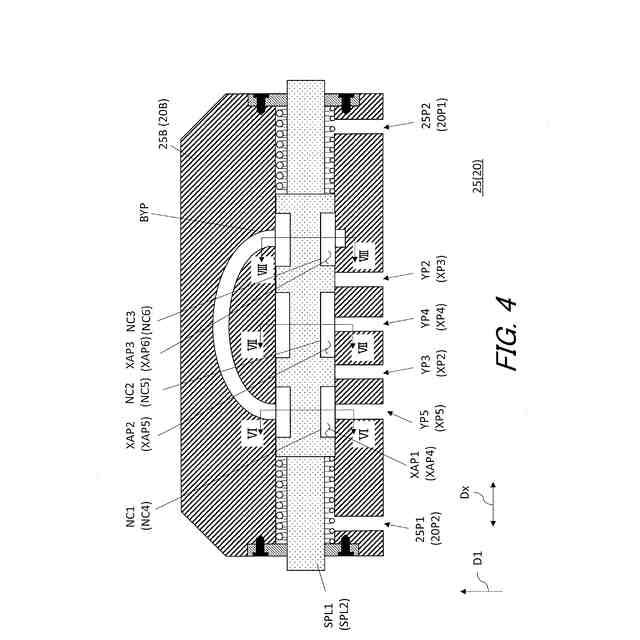
図4は、第1制御弁と第2制御弁の内部構成の一例を表した概略構成図である。
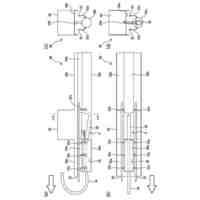
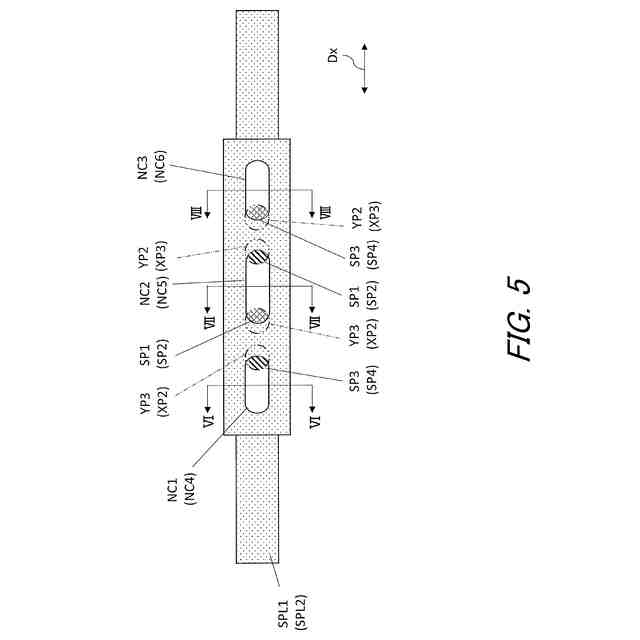
図5は、図4の第1方向から見た第1スプールと第2スプールを見た図である。
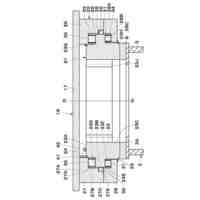
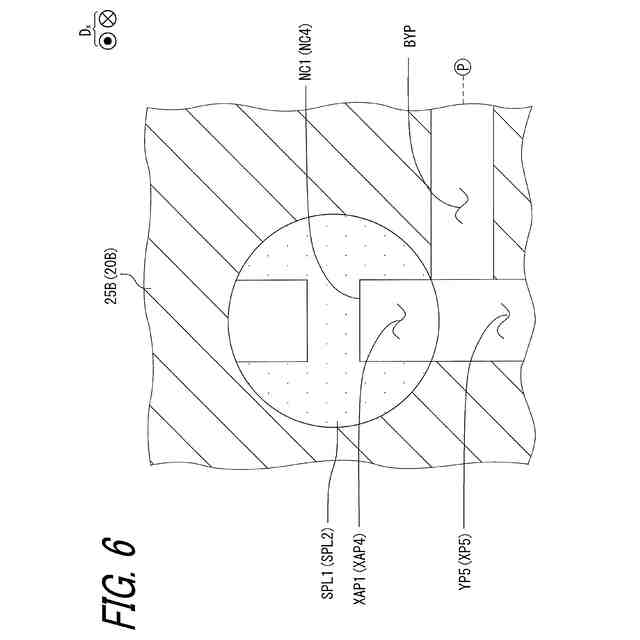
図6は、図4のラインVI-VIにおける第1制御弁と第2制御弁の断面図である。
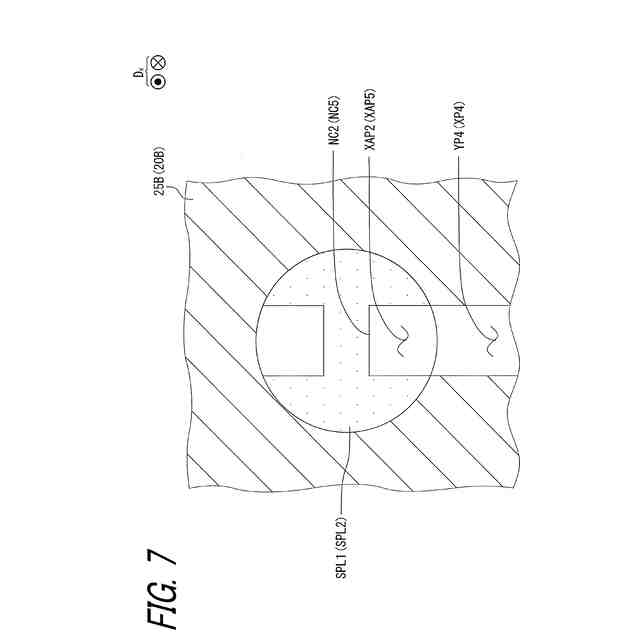
図7は、図4のラインVII-VIIにおける第1制御弁と第2制御弁の断面図である。
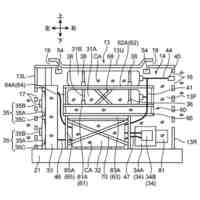
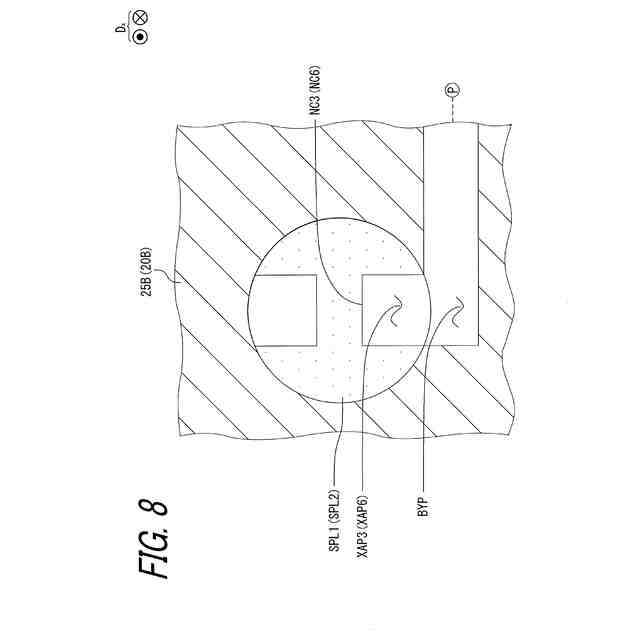
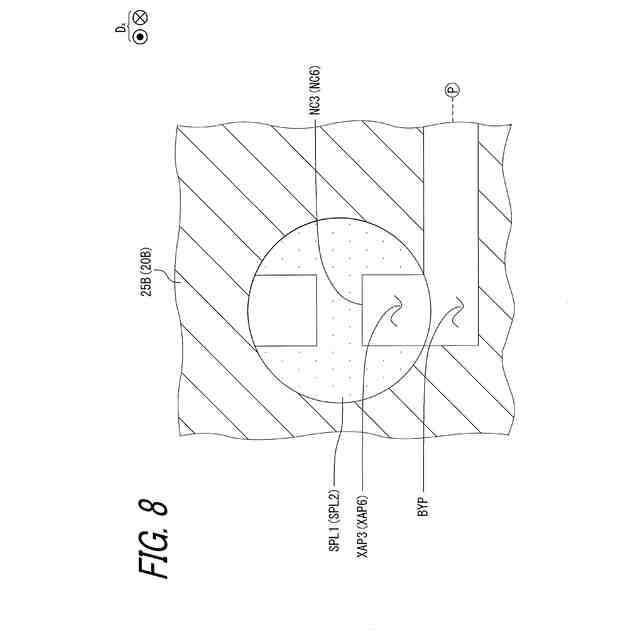
図8は、図4のラインVIII-VIIIにおける第1制御弁と第2制御弁の断面図である。
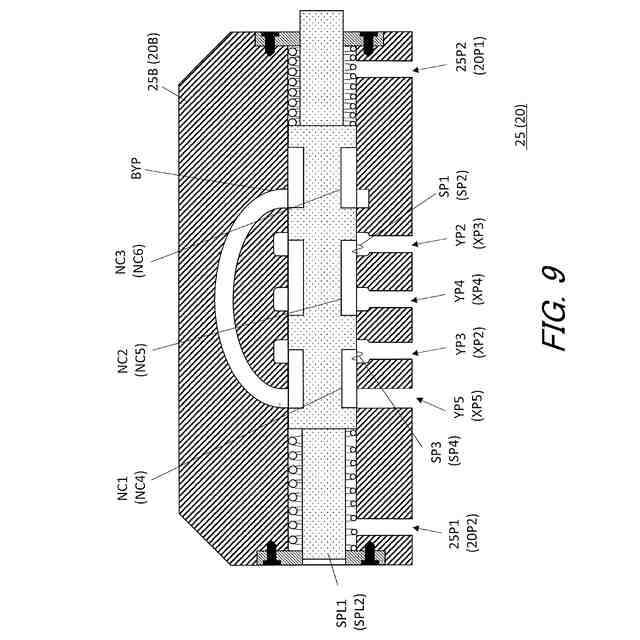
図9は、第1制御弁と第2制御弁の内部構成の別の一例を表した概略構成図である。
図10は、第1制御弁と第2制御弁の内部構成のさらに別の一例を表した概略構成図である。
図11は、インプルメント姿勢検出センサが第1慣性計測ユニットと第2慣性計測ユニットとから成り、アーム姿勢検出センサがポテンショメータから成る場合のインプルメント姿勢電気制御/インプルメント姿勢機械制御の概念図である。
図12は、インプルメント姿勢電気制御におけるアーム高さの変化とインプルメント傾角の変化との関係を表す図である。
図13は、インプルメント姿勢検出センサがポテンショメータまたはリニアセンサから成り、アーム姿勢検出センサがリニアセンサから成る場合のインプルメント姿勢電気制御/インプルメント姿勢機械制御の概念図である。
図14は、インプルメント姿勢電気制御におけるアーム高さの変化とジョイントの回転角の変化との関係を表す図である。
図15は、インプルメント姿勢電気制御におけるアーム高さの変化と第1油圧シリンダの位置の変化との関係を表す図である。
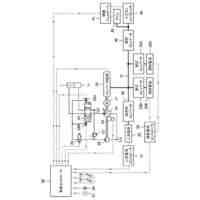
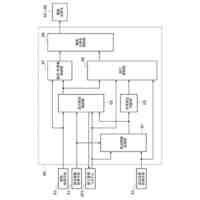
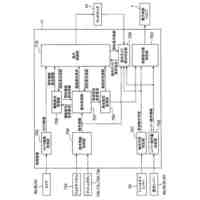
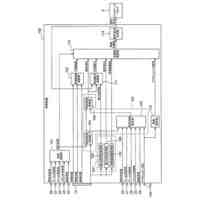
図16は、実施形態に係る制御ブロック図である。
図17は、エンジン6の回転速度と補正ゲインとの関係を表す図である。
図18は、実施形態に係る、操作レバー(アーム入力部材の前後方向の動き)の操作量と第2開口面積との対応関係の一例である。
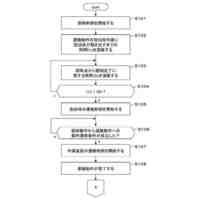
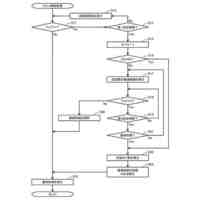
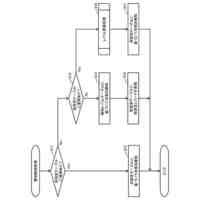
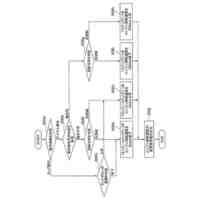
図19は、作業車両の制御方法を示すフローチャートである。
図20は、参照対応関係を説明するための図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
長尺平板パネル
5日前
個人
構造物の検査方法
6日前
株式会社東部
多翼型鋼管杭
8日前
株式会社大林組
基礎構造
12日前
カナデビア株式会社
起伏ゲート
6日前
日本車輌製造株式会社
杭打機
8日前
日立建機株式会社
作業機械
14日前
コベルコ建機株式会社
作業機械
20日前
コベルコ建機株式会社
作業機械
20日前
日立建機株式会社
建設機械
12日前
日立建機株式会社
作業機械
20日前
株式会社クボタ
作業機
12日前
日立建機株式会社
作業機械
12日前
合同会社ハイドロパワー
取水装置
19日前
住友重機械工業株式会社
作業機械
19日前
カナデビア株式会社
係留装置及びその制御方法
6日前
構法開発株式会社
埋込継手構造
5日前
日立建機株式会社
建設機械
14日前
日立建機株式会社
走行装置
15日前
末広産業株式会社
水路用型枠ユニット
13日前
株式会社クボタ
フロントローダ及び作業車両
5日前
日立建機株式会社
建設機械
12日前
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業機械
21日前
日立建機株式会社
作業機械
13日前
日立建機株式会社
作業機械
13日前
日立建機株式会社
作業機械
8日前
株式会社熊谷組
山留めアンカーの位置測量方法
14日前
住友重機械工業株式会社
作業現場監視システム
18日前
日立建機株式会社
作業機械
20日前
日立建機株式会社
建設機械
20日前
日立建機株式会社
作業機械の報知システム
21日前
住友建機株式会社
ショベル、ショベルの制御装置
13日前
株式会社本久
砂防堰堤構造及び砂防堰堤構築方法
12日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ