TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025005596
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023105823
出願日
2023-06-28
発明の名称
作業機械を制御するためのシステム
出願人
株式会社小松製作所
代理人
弁理士法人新樹グローバル・アイピー
主分類
E02F
9/20 20060101AFI20250109BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械によって土砂などのマテリアルを所定領域の周囲から所定領域に容易に集める。
【解決手段】システムは、走行操作装置と、センサと、コントローラとを備える。走行操作装置は、作業機械を走行させる走行指令を出力する。センサは、作業機械の位置を検出する。コントローラは、作業機械の走行方向を制御する。コントローラは、目標位置を設定する。コントローラは、作業機械の位置を取得する。コントローラは、作業機械を走行させる走行指令を受信したときの作業機械の位置を、スタート位置として設定する。コントローラは、スタート位置と目標位置とを通る経路を、目標経路として決定する。コントローラは、作業機械が目標経路に従って走行するように、作業機械の走行方向を制御する。
【選択図】図7
特許請求の範囲
【請求項1】
作業機械を制御するためのシステムであって、
前記作業機械を走行させる走行指令を出力する走行操作装置と、
前記作業機械の位置を検出するセンサと、
前記作業機械の走行方向を制御するコントローラと、
を備え、
前記コントローラは、
目標位置を設定し、
前記作業機械の位置を取得し、
前記作業機械を走行させる走行指令を受信したときの前記作業機械の位置を、スタート位置として設定し、
前記スタート位置と前記目標位置とを通る経路を、前記目標経路として決定し、
前記作業機械が前記目標経路に従って走行するように、前記作業機械の走行方向を制御する、
システム。
続きを表示(約 1,600 文字)
【請求項2】
前記コントローラは、前記走行指令が解除されても前記目標位置の設定を維持する、
請求項1に記載のシステム。
【請求項3】
前記コントローラは、
前回の前記走行指令が解除された後、次の走行指令を受信した場合には、前記次の走行指令を受信したときの前記作業機械の位置を、次のスタート位置として再設定し、
前記次のスタート位置と前記目標位置とを通る経路を、次の目標経路として決定する、
請求項1に記載のシステム。
【請求項4】
前記走行操作装置は、中立位置から前進位置と後進位置とに手動操作可能であり、
前記コントローラは、
前記走行操作装置が前記前進位置に操作されることで前記走行指令を受信したときの前記作業機械の位置を、前記目標経路のスタート位置として設定し、
前記走行操作装置が前記中立位置又は前記後進位置に操作された場合には、前記走行指令が解除されたと判定する、
請求項3に記載のシステム。
【請求項5】
前記作業機械を手動で操舵するために操作可能なステアリング操作装置をさらに備え、
前記コントローラは、
前回の前記走行指令が解除された後、前記ステアリング操作装置の操作に応じて前記作業機械が前回の前記目標経路から外れた位置に移動しても、前記目標位置の設定を維持し、
次の走行指令を受信した場合には、前記次の走行指令を受信したときの前記作業機械の位置を、次のスタート位置として再設定し、
前記次のスタート位置と前記目標位置とを通る経路を、次の目標経路として決定する、
請求項1に記載のシステム。
【請求項6】
作業機械を制御するためのシステムであって、
前記作業機械の位置を検出するセンサと、
前記作業機械の走行方向を制御するコントローラと、
を備え、
前記コントローラは、
目標位置を設定し、
前記作業機械の位置を取得し、
前記目標位置を通る第1目標経路と、前記目標位置を通り前記第1目標経路とは異なる方位に向かって延びる第2目標経路とを含む複数の目標経路を決定し、
前記複数の目標経路のそれぞれに従って走行するように前記作業機械の走行方向を制御する、
システム。
【請求項7】
前記コントローラは、前記目標位置を中心として放射状に延びるように、前記複数の目標経路を決定する、
請求項6に記載のシステム。
【請求項8】
前記コントローラは、前記目標位置を中心として等角度に延びるように、前記複数の目標経路を決定する、
請求項6に記載のシステム。
【請求項9】
オペレータによって操作可能な入力装置をさらに備え、
前記コントローラは、前記複数の目標経路のうち、前記入力装置によって選択された目標経路に従って走行するように前記作業機械の走行方向を制御する、
請求項6に記載のシステム。
【請求項10】
作業機械を制御するためのシステムであって、
前記作業機械を走行させる走行指令を出力する走行操作装置と、
前記作業機械の位置を検出するセンサと、
前記作業機械の走行方向を制御するコントローラと、
を備え、
前記コントローラは、
目標位置を設定し、
前記作業機械の位置を取得し、
前記作業機械を走行させる走行指令を受信した場合に、前記作業機械が前記目標位置に向かうように、前記作業機械の走行方向を制御し、
前記走行指令が解除されても前記目標位置の設定を維持する、
システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械を制御するためのシステムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、所定の目標経路に従って走行するように作業機械を自動制御する技術が知られている。例えば、特許文献1の作業機械の制御システムでは、互いに平行に延びる複数のスロット(目標経路)が設定される。複数のスロットは、それぞれ開始位置と終了位置とを含む。制御システムは、作業機械が複数のスロットのそれぞれに従って走行するように、作業機械を制御する。
【0003】
例えば、作業機械は、第1スロットに従って、第1開始位置から第1終了位置まで、走行しながら、作業機によって掘削を行う。次に、作業機械は、第2スロットの第2開始位置に移動し、第2スロットに従って、第2開始位置から第2終了位置まで、走行しながら、作業機によって掘削を行う。上記の作業が繰り返されることで、各スロットに沿って地面が掘削される。
【先行技術文献】
【特許文献】
【0004】
特開2020-166303
【発明の概要】
【発明が解決しようとする課題】
【0005】
作業機械が行う作業には、土砂などのマテリアルを一か所に集めるものがある。例えば、整地作業を行う現場においては、整地作業によって掘削した土砂が、油圧ショベルによってダンプトラックに積み込まれる。その場合、油圧ショベルによる積込作業を効率よく行うために、掘削した土砂を、油圧ショベルの周囲から、油圧ショベルの近くの所定領域に集めることが望まれる。本開示の目的は、作業機械によって土砂などのマテリアルを所定領域の周囲から所定領域に容易に集めることにある。
【課題を解決するための手段】
【0006】
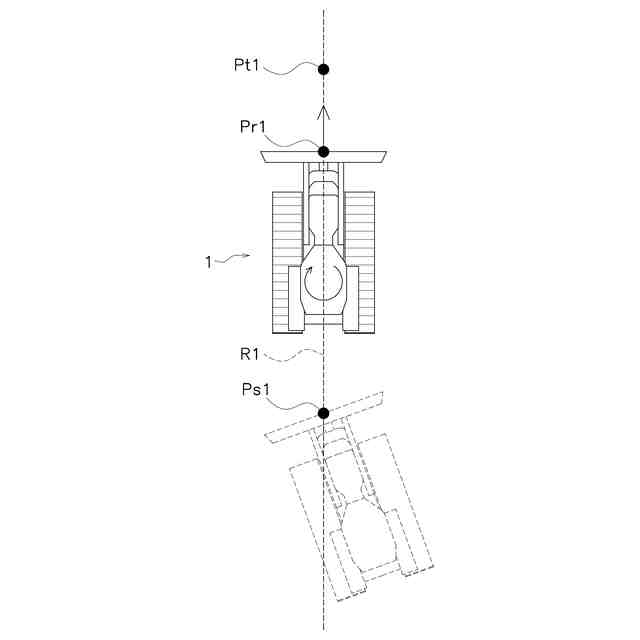
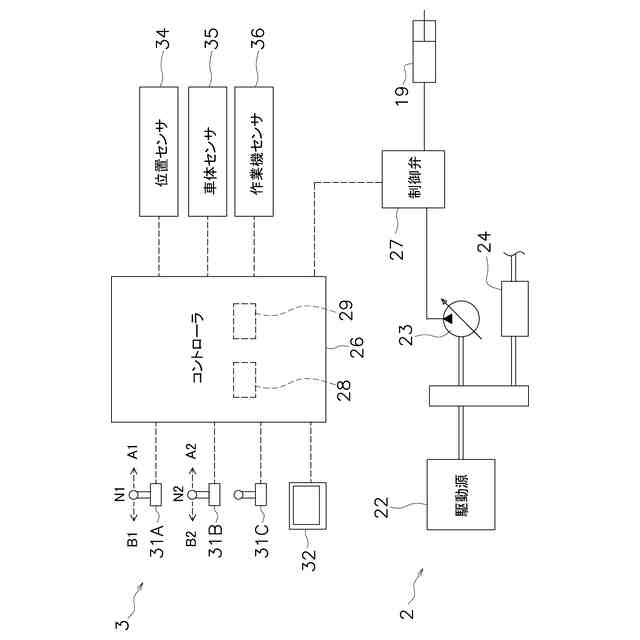
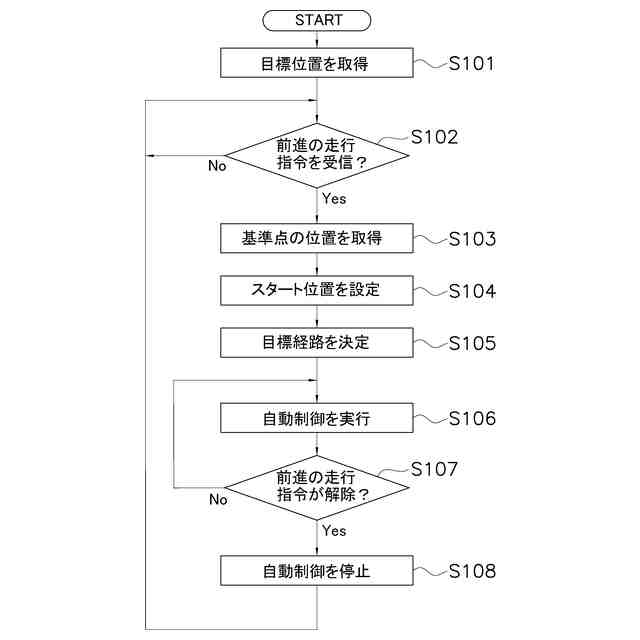
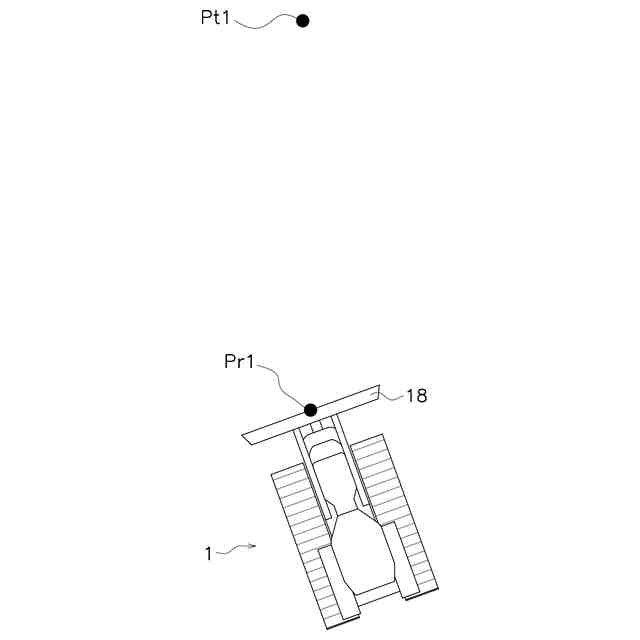
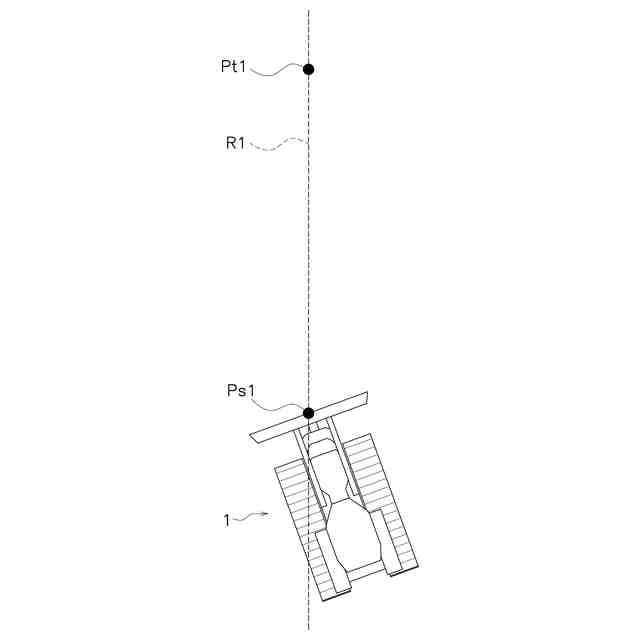
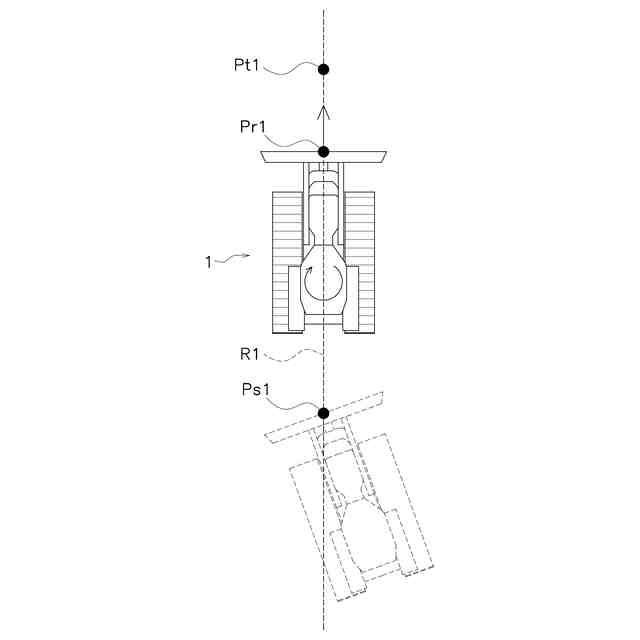
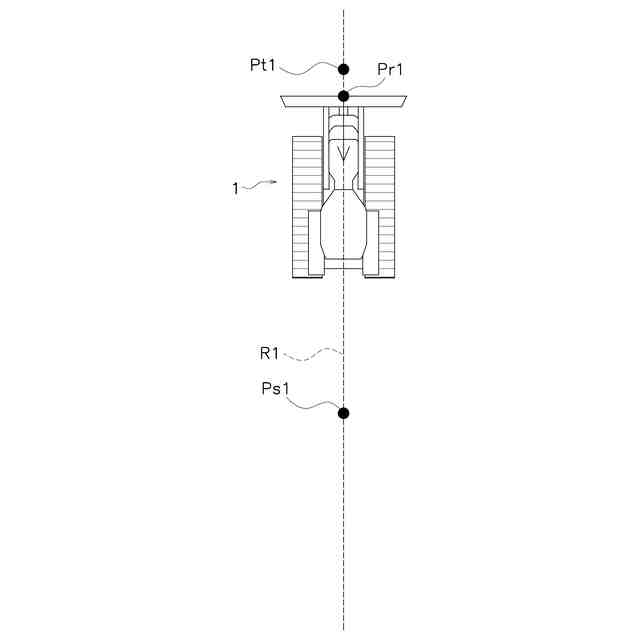
本開示の第1の態様に係るシステムは、作業機械を制御するためのシステムであって、走行操作装置と、センサと、コントローラとを備える。走行操作装置は、作業機械を走行させる走行指令を出力する。センサは、作業機械の位置を検出する。コントローラは、作業機械の走行方向を制御する。コントローラは、目標位置を設定する。コントローラは、作業機械の位置を取得する。コントローラは、作業機械を走行させる走行指令を受信したときの作業機械の位置を、スタート位置として設定する。コントローラは、スタート位置と目標位置とを通る経路を、目標経路として決定する。コントローラは、作業機械が目標経路に従って走行するように、作業機械の走行方向を制御する。
【0007】
第1の態様に係るシステムでは、作業機械を任意の位置に移動させてから走行指令を出力させることで、任意の位置が目標経路のスタート位置として設定される。そのため、任意のスタート位置から目標位置に向かって目標経路に従って走行するように、作業機械の走行方向が自動制御される。それにより、目標位置の周囲の任意のスタート位置から目標位置に、マテリアルを容易に集めることができる。
【0008】
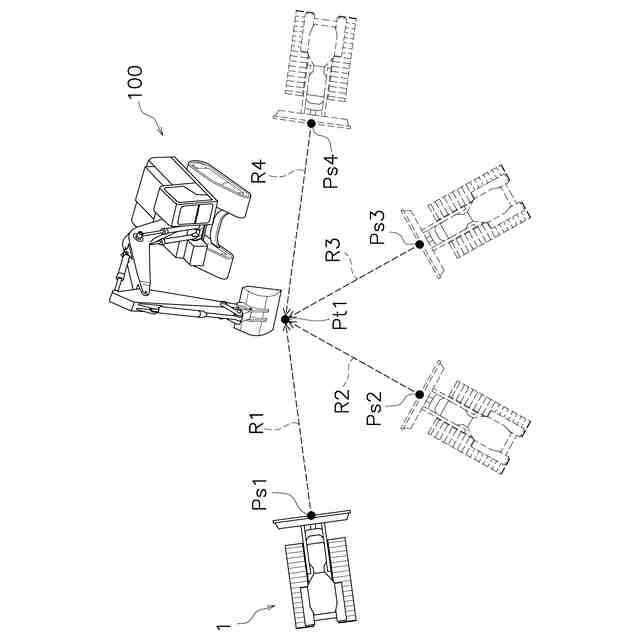
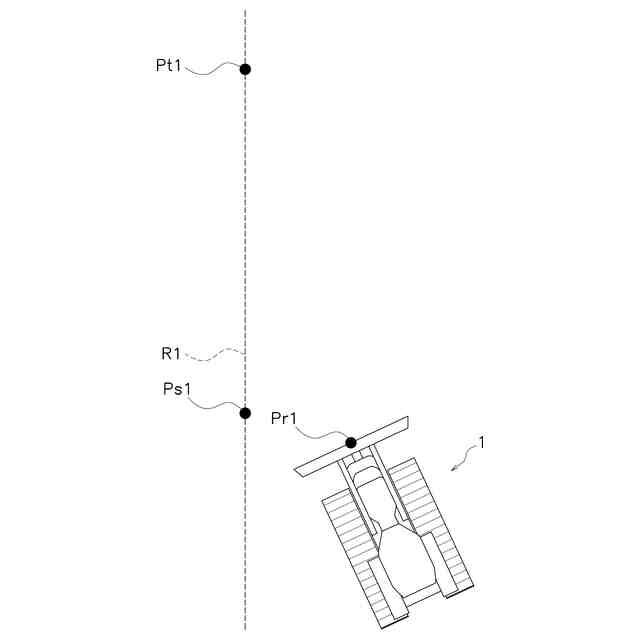
本開示の第2の態様に係るシステムは、作業機械を制御するためのシステムであって、センサとコントローラとを備える。センサは、作業機械の位置を検出する。コントローラは、作業機械の走行方向を制御する。コントローラは、目標位置を設定する。コントローラは、作業機械の位置を取得する。コントローラは、第1目標経路と第2目標経路とを含む複数の目標経路を決定する。第1目標経路は、目標位置を通る。第2目標経路は、目標位置を通り、第1目標経路とは異なる方位に向かって延びる。コントローラは、複数の目標経路のそれぞれに従って走行するように作業機械の走行方向を制御する。
【0009】
第2の態様に係るシステムでは、互いに異なる方位から目標位置に向かって延びる複数の目標経路が設定される。そのため、互いに異なる方位から目標位置に向かって、目標経路に従って走行するように、作業機械の走行方向が自動制御される。それにより、目標位置の周囲から目標位置に、マテリアルを容易に集めることができる。
【0010】
本開示の第3の態様に係るシステムは、作業機械を制御するためのシステムであって、走行操作装置と、センサと、コントローラとを備える。走行操作装置は、作業機械を走行させる走行指令を出力する。センサは、作業機械の位置を検出する。コントローラは、作業機械の走行方向を制御する。コントローラは、目標位置を設定する。コントローラは、作業機械の位置を取得する。コントローラは、作業機械を走行させる走行指令を受信した場合に、作業機械が目標位置に向かうように、作業機械の走行方向を制御する。コントローラは、走行指令が解除されても目標位置の設定を維持する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
モデル生成装置、判定装置および判定方法
2日前
株式会社大林組
建築物
5日前
住友建機株式会社
ショベル
1か月前
株式会社ジェック
水流方向切替装置
7日前
日本車輌製造株式会社
杭打機
2日前
株式会社テクアノーツ
通船ゲート装置
2日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
ヤンマーホールディングス株式会社
作業機械
5日前
日立建機株式会社
作業機械
今日
株式会社クボタ
作業機
5日前
コベルコ建機株式会社
作業機械
2日前
住友重機械工業株式会社
ショベル
5日前
住友重機械工業株式会社
ショベル
5日前
住友重機械工業株式会社
作業機械
14日前
株式会社地盤リスク研究所
擁壁の補強工法
2日前
鹿島建設株式会社
建込み方法
27日前
大和ハウス工業株式会社
建物の建設方法
5日前
日鉄建材株式会社
透過型砂防堰堤の設計方法
7日前
日本製鉄株式会社
堤防
5日前
個人
アンカーボルト支持装置
1か月前
スーパーレジンクラフト株式会社
防塵板付消波装置
1か月前
ジーネットワーク株式会社
低空頭FRP.Tube合成杭
1か月前
大和ハウス工業株式会社
浸水推定装置
2日前
コベルコ建機株式会社
作業システム
2日前
日立建機株式会社
作業車両
29日前
清水建設株式会社
礫材の液状化対策構造
2日前
一般財団法人電力中央研究所
地盤の状況計測装置
5日前
三陽機器株式会社
作業機の作業部連結構造
29日前
コベルコ建機株式会社
建設機械
1日前
株式会社地盤リスク研究所
盛土安定化工法、及び盛土構造
2日前
株式会社日立建機ティエラ
建設機械
7日前
株式会社大林組
判定支援システム及び判定支援方法
5日前
住友建機株式会社
ショベル、及びショベルの表示装置
5日前
株式会社クボタ
作業機および作業機の制御方法
13日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ