TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025001366
公報種別
公開特許公報(A)
公開日
2025-01-08
出願番号
2023100901
出願日
2023-06-20
発明の名称
作業機械
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
E02F
9/20 20060101AFI20241225BHJP(水工;基礎;土砂の移送)
要約
【課題】精度が高いシリンダ角度を得ることができる技術を提供する。
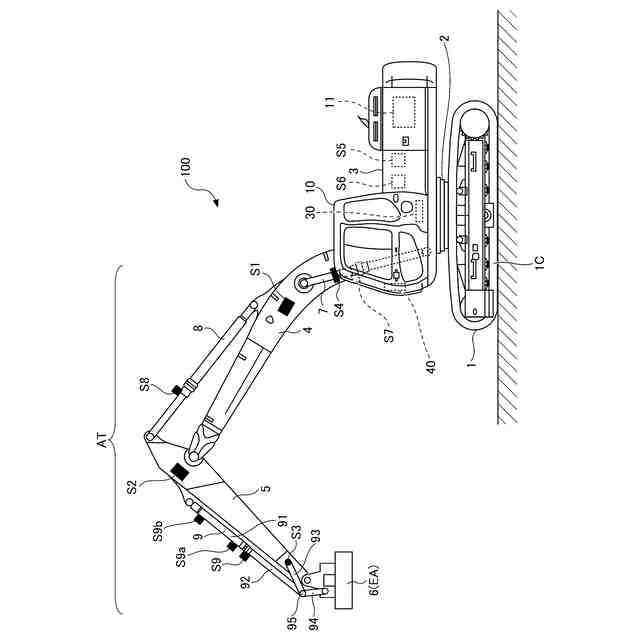
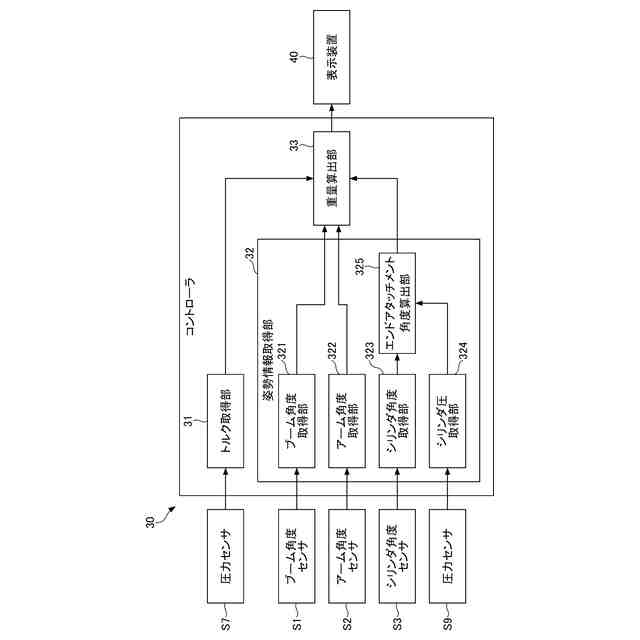
【解決手段】作業機械100は、エンドアタッチメントEAと、エンドアタッチメントシリンダ9と、シリンダ角度を検出するシリンダ角度センサS3と、シリンダ圧を検出する圧力センサS9と、コントローラ30と、を含む。コントローラ30は、シリンダ角度センサS3が検出するシリンダ角度のうち設定された角度範囲において、圧力センサS9が検出したシリンダ圧を用いて角度を算出する。
【選択図】図4
特許請求の範囲
【請求項1】
エンドアタッチメントと、
前記エンドアタッチメントを動作させるエンドアタッチメントシリンダと、
前記エンドアタッチメントシリンダの動作に伴って変化するシリンダ角度を検出するシリンダ角度センサと、
前記エンドアタッチメントシリンダのシリンダ圧を検出する圧力センサと、
前記シリンダ角度センサの信号および前記圧力センサの信号を処理する処理部と、を含む作業機械であって、
前記処理部は、前記シリンダ角度センサが検出する前記シリンダ角度のうち設定された角度範囲において、前記圧力センサが検出した前記シリンダ圧を用いて角度を算出する、
作業機械。
続きを表示(約 770 文字)
【請求項2】
前記エンドアタッチメントは、アームの先端に回動可能に連結され、
前記処理部は、前記シリンダ角度に基づき前記アームに対する前記エンドアタッチメントの回転角度を算出する、
請求項1に記載の作業機械。
【請求項3】
前記処理部は、前記エンドアタッチメントの回転角度に基づき前記エンドアタッチメントが保持する搬送物の重量を算出する、
請求項2に記載の作業機械。
【請求項4】
前記シリンダ角度センサは、前記エンドアタッチメントから離れた位置に設置される、
請求項2に記載の作業機械。
【請求項5】
前記処理部は、前記エンドアタッチメントに対応する定数を前記シリンダ圧に乗算した角度換算値と、設定された前記角度範囲に前記シリンダ角度が突入した際の突入角度と、前記突入角度に対するずれ量の定数とに基づき前記角度を算出する、
請求項1乃至4のいずれか1項に記載の作業機械。
【請求項6】
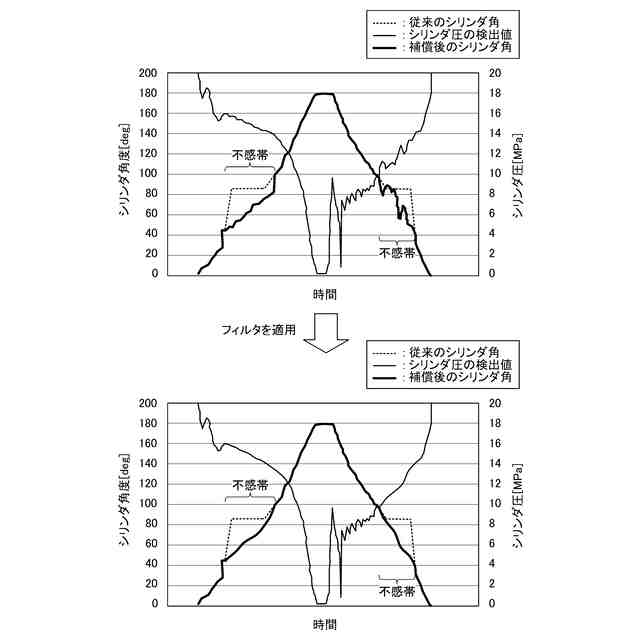
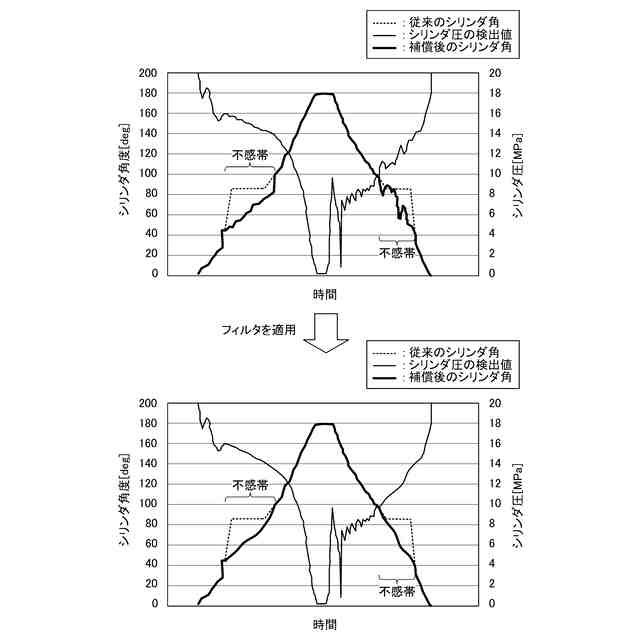
前記処理部は、前記角度を算出する前に前記圧力センサが検出した前記シリンダ圧の振幅を小さくするフィルタ処理を行う、
請求項1乃至4のいずれか1項に記載の作業機械。
【請求項7】
前記作業機械は、バケット以外の前記エンドアタッチメントを有する応用機である、
請求項1乃至4のいずれか1項に記載の作業機械。
【請求項8】
前記エンドアタッチメントは、磁力により搬送物を吸着して保持するリフティングマグネットである、
請求項7に記載の作業機械。
【請求項9】
前記エンドアタッチメントは、搬送物を挟み込んで保持するグラップルである、
請求項7に記載の作業機械。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、搬送物である土砂をバケットに収容した状態で、その重量を測定するショベル(作業機械)が開示されている。このショベルは、バケットの回転角度(バケット角度)を検出するバケット角度センサを含むアタッチメントの複数の姿勢センサの検出結果、およびアタッチメントの歪みを検出する歪みセンサの各検出結果を用いて、搬送物の重量を測定している。
【0003】
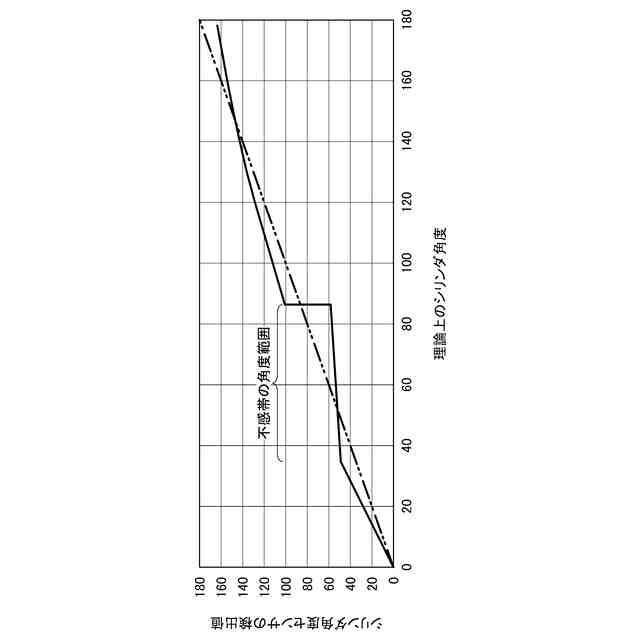
ところで、作業機械は、バケット角度センサによりバケット角度を検出する構成に限らず、バケットを動作させるシリンダ機構の角度(シリンダ角度)を検出するシリンダ角度センサを有し、このシリンダ角度からバケット角度を推定することもできる。しかしながら、シリンダ角度を検出する構成では、シリンダ機構を伸縮してもシリンダ角度が変わらない箇所があり、シリンダ角度センサの検出情報には不感帯の角度範囲が生じてしまう。
【先行技術文献】
【特許文献】
【0004】
特開2017-166232号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来、作業機械は、シリンダ角度の検出に不感帯の角度範囲が生じた場合、例えば、予め設定した固定値を用いて搬送物の重量を算出している。すなわち、不感帯の角度範囲で搬送物の重量を算出すると、その算出精度が低下することになる。
【0006】
特に、作業機械は、ショベルの他にも、搬送物を吸着して搬送するリフティングマグネット、搬送物を挟み込んで搬送するグラップル等のエンドアタッチメントを有する応用機がある。応用機は、エンドアタッチメントを様々な角度の回動にして搬送物を保持しその重量を測定することがあるため、シリンダ角度センサのシリンダ角度に不感帯の角度範囲があると、搬送物の重量の測定に誤差が生じ易くなってしまう。
【0007】
本開示は、精度が高いシリンダ角度を安定して得ることができる技術を提供する。
【課題を解決するための手段】
【0008】
本開示の一態様によれば、エンドアタッチメントと、前記エンドアタッチメントを動作させるエンドアタッチメントシリンダと、前記エンドアタッチメントシリンダの動作に伴って変化するシリンダ角度を検出するシリンダ角度センサと、前記エンドアタッチメントシリンダのシリンダ圧を検出する圧力センサと、前記シリンダ角度センサの信号および前記圧力センサの信号を処理する処理部と、を含む作業機械であって、前記処理部は、前記シリンダ角度センサが検出する前記シリンダ角度のうち設定された角度範囲において、前記圧力センサが検出した前記シリンダ圧を用いて角度を算出する、作業機械が提供される。
【発明の効果】
【0009】
一態様によれば、精度が高いシリンダ角度を安定して得ることができる。
【図面の簡単な説明】
【0010】
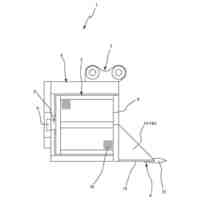
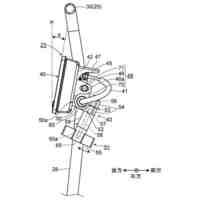
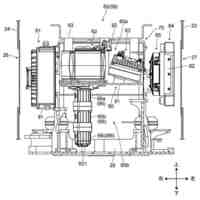
実施形態に係る作業機械の側面図である。
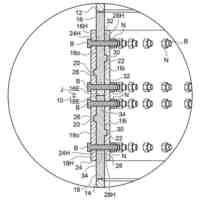
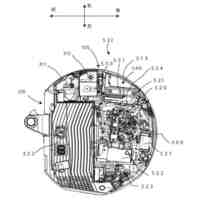
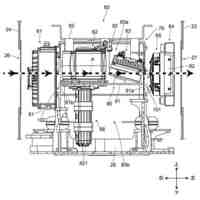
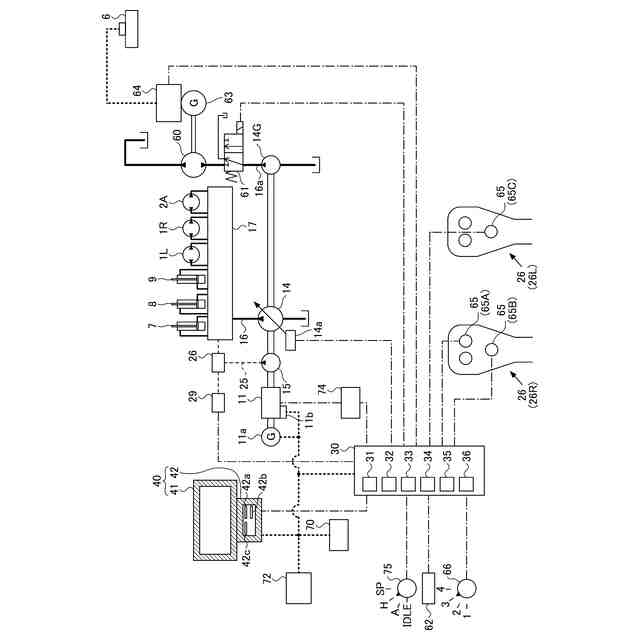
作業機械に搭載される駆動系の構成例を示す図である。
シリンダ角度センサが検出したシリンダ角度を例示するグラフである。
シリンダ角度センサの不感帯の角度範囲と、シリンダ圧との関係を示すグラフである。
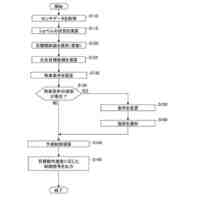
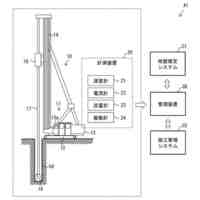
重量を算出する際のコントローラの機能ブロックを示すブロック図である。
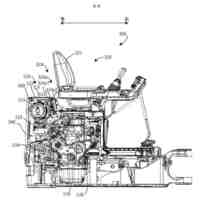
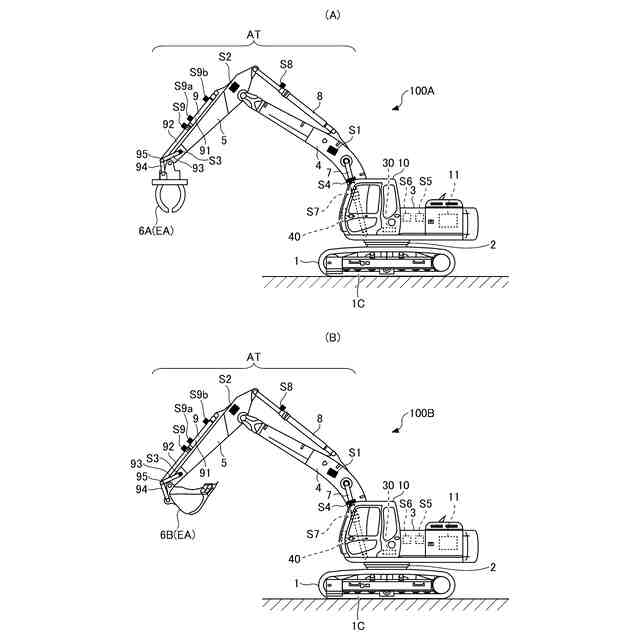
図6(A)は、第1変形例に係る作業機械を示す側面図である。図6(B)は、第2変形例に係る作業機械を示す側面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
バケット
1か月前
個人
建物の不同沈下の修正方法
1か月前
鹿島建設株式会社
接続方法
12日前
株式会社大林組
操縦装置
1か月前
千代田工営株式会社
回転貫入杭
1か月前
株式会社富田製作所
継手部構造
1か月前
株式会社郷土開発
傾斜地の切土工法
11日前
株式会社熊谷組
山留壁用親杭
1か月前
ウエダ産業株式会社
アタッチメント
3日前
ヤンマーホールディングス株式会社
作業機械
1か月前
日本車輌製造株式会社
建設機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
25日前
株式会社クボタ
作業機
11日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
24日前
ヤンマーホールディングス株式会社
作業機械
1か月前
FKS株式会社
擁壁及び擁壁の築造方法
1か月前
鹿島建設株式会社
接続方法および接続構造
1か月前
株式会社三誠
建物の免震構造
1か月前
株式会社次世代一次産業実践所
登山道の施工装置
1か月前
株式会社竹内製作所
作業用車両
1か月前
株式会社竹内製作所
作業用車両
1か月前
株式会社竹内製作所
作業用車両
1か月前
株式会社竹内製作所
作業用車両
1か月前
山形新興株式会社
建築物の基礎及び基礎成形型
1か月前
個人
アンカーボルト支持装置
1か月前
日本車輌製造株式会社
杭打機の制御システム
1か月前
日本車輌製造株式会社
杭打機の表示システム
27日前
ナブテスコ株式会社
ドーザブレード駆動機構
24日前
株式会社大林組
施工支援装置及び施工支援方法
1か月前
日立建機株式会社
作業機械
1か月前
株式会社大林組
施工支援装置及び施工支援方法
1か月前
株式会社大林組
掘削支援装置及び掘削支援方法
5日前
日本車輌製造株式会社
建設機械の電源システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ