TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025008970
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023111640
出願日
2023-07-06
発明の名称
モデル生成装置、判定装置および判定方法
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
G06Q
10/20 20230101AFI20250109BHJP(計算;計数)
要約
【課題】作業機械の過去の検査結果に基づいて、エラーコードから作業機械の検査の要否を精度よく決定する。
【解決手段】モデル生成装置は、検査情報取得ステップと、エラー取得ステップと、生成ステップを実行する。検査情報取得ステップでは、作業機械の検査について、検査を実行した時刻と検査の結果により判明した故障の有無とを取得する。エラー取得ステップでは、作業機械の制御装置から検査を実行した時刻よりも前の時間に出力されたエラーコードの組み合わせを取得する。作業機械の制御装置は、作業機械の状態が所望の状態でない場合にエラーの種別を表すエラーコードを出力する。生成ステップでは、故障の有無と、検査を実行した時刻よりも前の時間に出力されたエラーコードの組み合わせとに基づいて、エラーコードの組み合わせから故障の有無を予測するための予測モデルを生成する。
【選択図】図1
特許請求の範囲
【請求項1】
プロセッサを備え、
前記プロセッサは、
作業機械の検査について、前記検査を実行した時刻と前記検査の結果により判明した故障の有無とを取得する検査情報取得ステップと、
前記作業機械の状態が所望の状態でない場合にエラーの種別を表すエラーコードを出力する前記作業機械の制御装置から、前記検査を実行した時刻よりも前の時間に出力された前記エラーコードの組み合わせを取得するエラー取得ステップと、
前記故障の有無と、前記検査を実行した時刻よりも前の時間に出力されたエラーコードの組み合わせとに基づいて、前記エラーコードの組み合わせから前記故障の有無を予測するための予測モデルを生成する生成ステップと
を実行する
モデル生成装置。
続きを表示(約 1,200 文字)
【請求項2】
前記生成ステップでは、複数の検査それぞれについて、前記故障の有無と前記検査を実行した時刻よりも前の時間に出力された前記エラーコードの組み合わせとの統計処理によって、前記予測モデルを生成する
請求項1に記載のモデル生成装置。
【請求項3】
前記生成ステップでは、前記検査を実行した時刻よりも前の時間に出力された前記エラーコードの組み合わせのパターンと、前記検査それぞれにおける前記故障の有無との統計処理によって、前記予測モデルを生成する
請求項1に記載のモデル生成装置。
【請求項4】
前記生成ステップでは、エラーコードの組み合わせが変化しない期間ごとに、当該期間において少なくとも1つの故障が判明したか否かを判定し、前記少なくとも1つの故障が判明した期間の数に基づく統計処理によって、前記予測モデルを生成する
請求項3に記載のモデル生成装置。
【請求項5】
前記プロセッサは、
前記検査の実績が少ない前記エラーコードの組み合わせを特定する特定ステップをさらに実行する
請求項3または請求項4に記載のモデル生成装置。
【請求項6】
プロセッサを備え、
前記プロセッサは、
作業機械の状態が所望の状態でない場合にエラーの種別を表すエラーコードを出力する前記作業機械の制御装置から現在時刻よりも前の時間に出力された前記エラーコードの組み合わせを取得するエラー取得ステップと、
前記作業機械の検査を実行した時刻と前記検査の結果により判明した故障の有無と前記検査を実行した時刻よりも前の時間に出力された前記エラーコードの組み合わせとに基づいて生成された、前記エラーコードの組み合わせから前記故障の有無を予測するための予測モデルと、前記作業機械の制御装置から現在時刻よりも前の時間に出力された前記エラーコードの組み合わせとに基づいて、前記作業機械の検査の要否に関する情報を出力する出力ステップと
を実行する判定装置。
【請求項7】
作業機械の状態が所望の状態でない場合にエラーの種別を表すエラーコードを出力する前記作業機械の制御装置から現在時刻よりも前の時間に出力された前記エラーコードの組み合わせを取得するエラー取得ステップと、
前記作業機械の検査を実行した時刻と前記検査の結果によって判明した故障の有無と前記検査を実行した時刻よりも前の時間に出力された前記エラーコードの組み合わせとに基づいて生成された、前記エラーコードの組み合わせから前記故障の有無を予測するための予測モデルと、前記作業機械の制御装置から現在時刻よりも前の時間に出力された前記エラーコードの組み合わせとに基づいて、前記作業機械の検査の要否に関する情報を出力する出力ステップと
を備える判定方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、モデル生成装置、判定装置および判定方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
作業機械に搭載された制御装置は、センサなどを介して作業機械の状態を監視し、作業機械の状態が所望の状態でない場合に、エラーを通知する。エラーの通知には、エラーの内容を表すエラーコードが付されており、保守者は当該エラーコードを読み取って作業機械の検査の要否を検討する。特許文献1には、エラーコードから作業機械の異常度合いを判断する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2002-180502号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
エラーは、センサの計測値が所定の範囲を超えたときや、通信などの制御に失敗したときに出力される。そのため、エラーの発生は必ずしも作業機械の故障を表しているわけではない。そのため、保守者はエラーコードから作業機械の検査の要否を検討することが困難である。また保守者の経験によって検討の精度が異なる可能性がある。
本開示の目的は、作業機械の過去の検査結果およびエラーコードの発生状況に基づいて、エラーコードから作業機械の検査の要否を精度よく決定するためのモデル生成装置、判定装置および判定方法を提供することにある。
【課題を解決するための手段】
【0005】
本発明の一態様によれば、モデル生成装置は、プロセッサを備え、前記プロセッサは、作業機械の検査について、前記検査を実行した時刻と前記検査の結果により判明した故障の有無とを取得する検査情報取得ステップと、前記作業機械の状態が所望の状態でない場合にエラーの種別を表すエラーコードを出力する前記作業機械の制御装置から前記検査を実行した時刻よりも前の時間に出力された前記エラーコードの組み合わせを取得するエラー取得ステップと、前記故障の有無と前記検査を実行した時刻よりも前の時間に出力された前記エラーコードの組み合わせとに基づいて、前記エラーコードの組み合わせから前記故障の有無を予測するための予測モデルを生成する生成ステップとを実行する。
【発明の効果】
【0006】
上記態様によれば、予測モデルを用いることで、作業機械の過去の検査結果に基づいて、エラーコードから作業機械の検査の要否を精度よく決定することができる。
【図面の簡単な説明】
【0007】
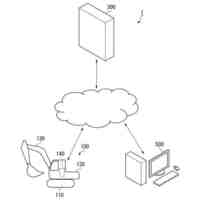
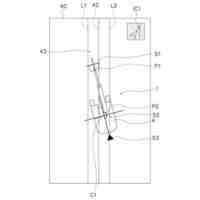
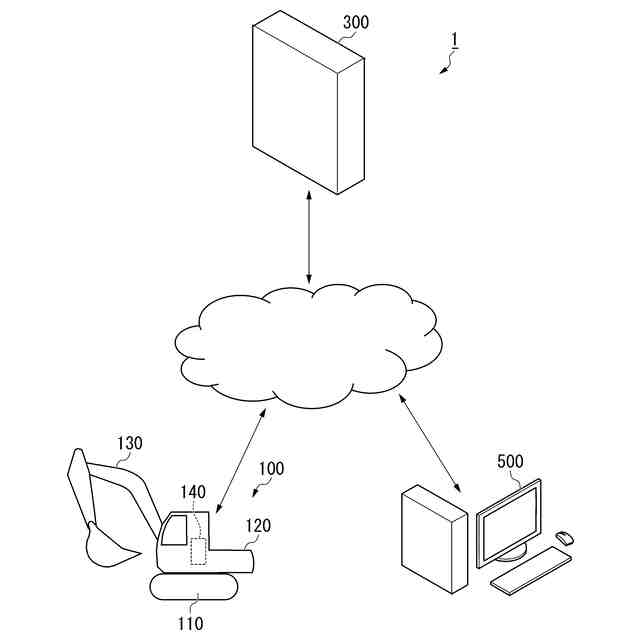
第一実施形態に係るトリガ通知システムの構成を示す概略図である。
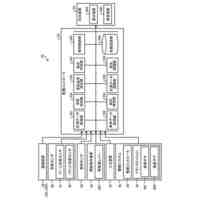
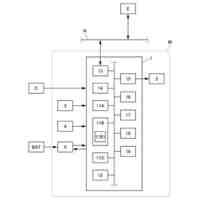
第一実施形態に係る制御装置の構成を示す概略ブロック図である。
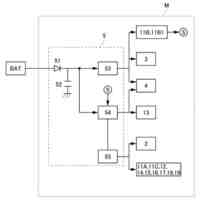
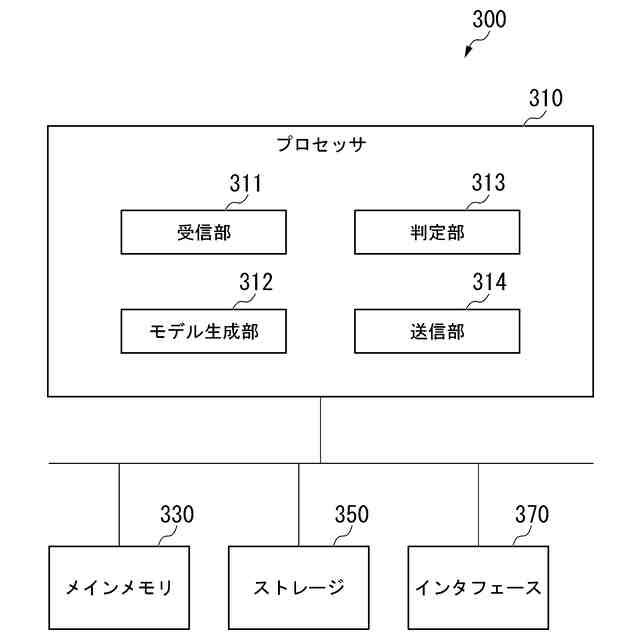
第一実施形態に係る管理サーバの構成を示す概略ブロック図である。
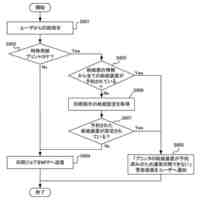
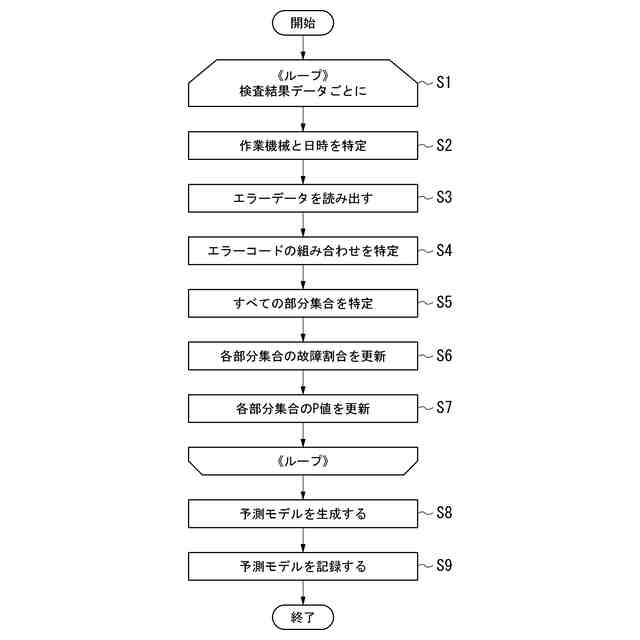
第一実施形態に係る管理サーバによるモデル生成処理を示すフローチャートである。
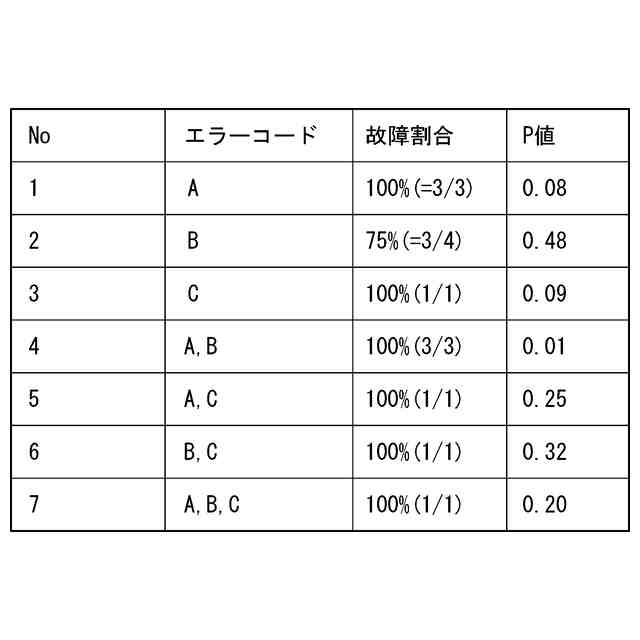
第一実施形態に係る予測モデルの例を示す図である。
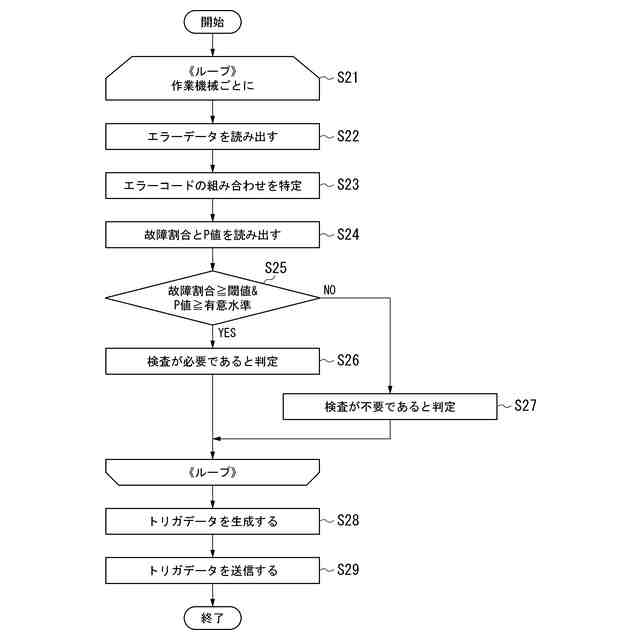
第一実施形態に係る管理サーバによるトリガ生成処理を示すフローチャートである。
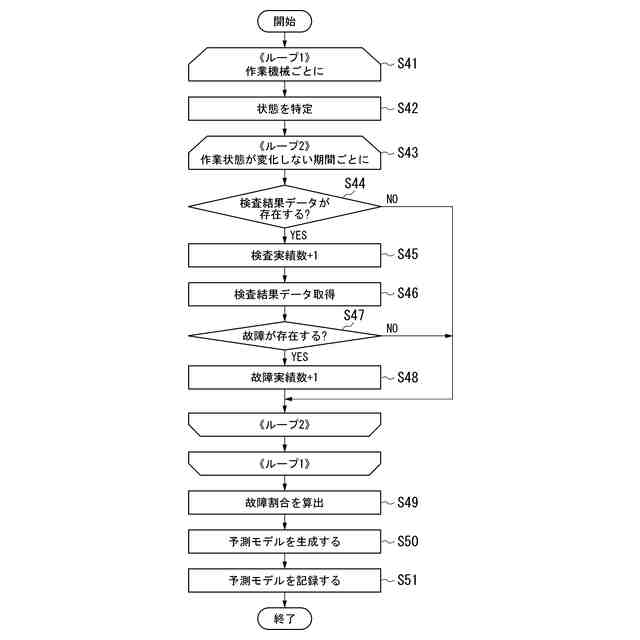
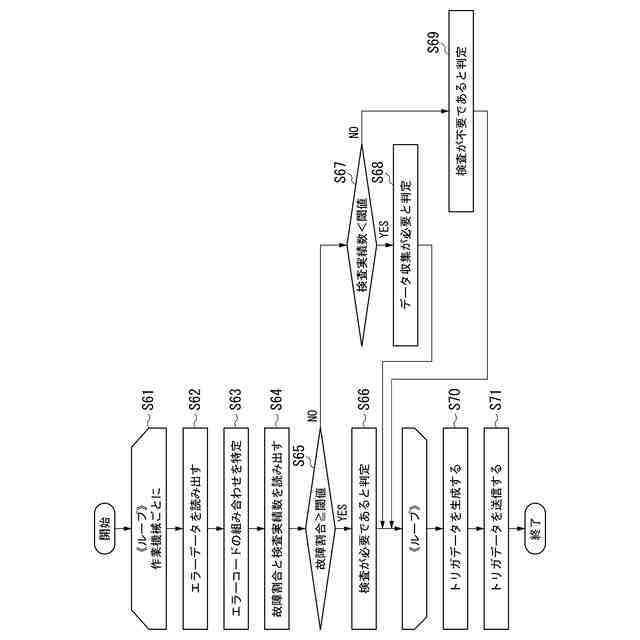
第二実施形態に係る管理サーバによるモデル生成処理を示すフローチャートである。
第二実施形態に係る予測モデルの例を示す図である。
第一実施形態に係る管理サーバによるトリガ生成処理を示すフローチャートである。
【発明を実施するための形態】
【0008】
〈第一実施形態〉
《トリガ通知システム1の構成》
以下、図面を参照しながら実施形態について詳しく説明する。
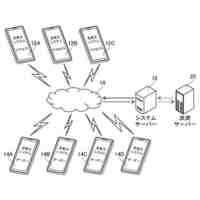
図1は、第一実施形態に係るトリガ通知システム1の構成を示す概略図である。トリガ通知システム1は、作業機械100の検査の要否を判定し、検査が必要であると判定された作業機械100を保守者に提示する。つまり、トリガ通知システム1は、保守者に作業機械100の検査のトリガを通知する。保守者は、トリガ通知システム1から通知されたトリガによって適切な作業機械100の検査タイミングを認識することができる。
【0009】
トリガ通知システム1は、作業機械100、管理サーバ300および保守者端末500を備える。作業機械100、管理サーバ300および保守者端末500は、ネットワークを介して通信可能に接続される。
【0010】
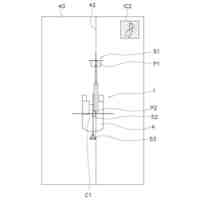
作業機械100は、例えばそれが油圧ショベルである場合、施工現場にて稼働し、土砂の掘削作業などを行う。図1に示す作業機械100は、油圧ショベルであるが、他の実施形態においては、他の作業機械であってもよい。作業機械100の例としては、ブルドーザ、ダンプトラック、フォークリフト、ホイールローダ、モータグレーダなどが挙げられる。作業機械100は、自車両の状態を監視し、状態が所望の状態でない場合に管理サーバ300にエラーデータを送信する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
モータ
5日前
株式会社小松製作所
車軸装置
2日前
株式会社小松製作所
作業機械の表示制御システム
5日前
株式会社小松製作所
作業機械の表示制御システム
5日前
株式会社小松製作所
作業機械のための表示システム
13日前
株式会社小松製作所
作業機械を制御するためのシステム
5日前
株式会社小松製作所
地形検知システム、および地形検知方法
6日前
株式会社小松製作所
作業機械の表示システムおよび表示方法
27日前
株式会社小松製作所
モデル生成装置、判定装置および判定方法
2日前
株式会社小松製作所
作業機械を制御するためのシステム及び方法
5日前
株式会社小松製作所
作業機械を制御するためのシステム及び方法
5日前
株式会社小松製作所
作業機械の監視システム及び作業機械の監視方法
5日前
株式会社小松製作所
作業機械の監視システム及び作業機械の監視方法
5日前
株式会社小松製作所
路面状態判別システム、および路面状態判別方法
6日前
株式会社小松製作所
電動作業機械のベースフレームおよび電動作業機械
6日前
株式会社小松製作所
作業車両、作業車両を含むシステムおよび作業車両の制御方法
5日前
株式会社小松製作所
作業車両、作業車両を含むシステムおよび作業車両の制御方法
5日前
株式会社小松製作所
作業機械の自動旋回制御の目標位置を設定するためのシステム
13日前
株式会社小松製作所
形状情報取得装置、形状情報取得システム、および形状情報取得方法
14日前
個人
物品
1か月前
個人
RFタグ読取装置
16日前
個人
自動精算システム
7日前
個人
自動精算システム
1か月前
個人
売買システム
13日前
個人
管理サーバ
27日前
個人
救急搬送システム
1か月前
個人
市場受発注システム
5日前
個人
発想支援方法及びシステム
2日前
日本精機株式会社
車両用表示装置
15日前
日本精機株式会社
車両用表示装置
15日前
キヤノン株式会社
印刷装置
1か月前
個人
分類処理プログラム及び方法
2日前
井関農機株式会社
ロボット作業車両
7日前
個人
VRによる人体各部位の立体化
27日前
個人
生成AIとの常時接続システム
1か月前
キヤノン株式会社
情報処理装置
29日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ