TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025001741
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023101381
出願日
2023-06-21
発明の名称
船舶の操舵制御装置および方法、並びに船舶
出願人
ヤマハ発動機株式会社
代理人
個人
,
個人
主分類
B63H
25/02 20060101AFI20241226BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】常に、ステアリングの回転操作により自動操船モードを解除できるようにする。
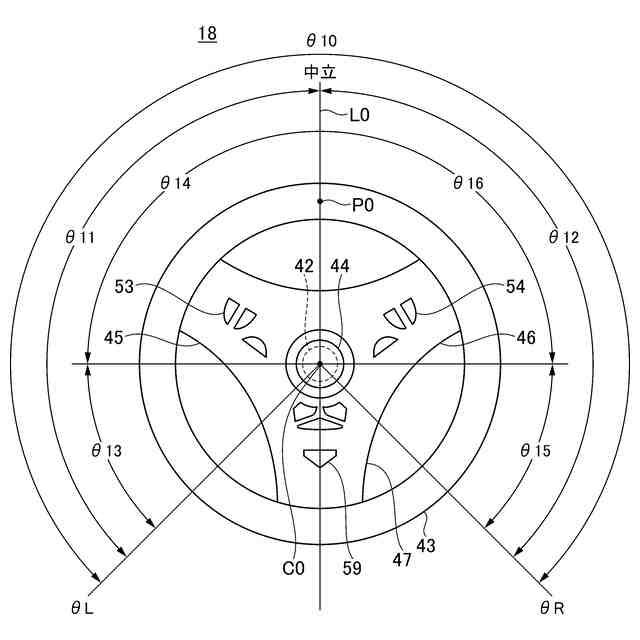
【解決手段】ステアリングホイール18の回転可能角度は、第1の角度位置θLと第2の角度位置θRとの間に規制されている。コントローラ30は、通常操船モードにおいて自動操船モードの開始指示が取得されたことに応じて自動操船モードへ移行すると共に、自動操船モードにおいてステアリングホイール18の回転角度が閾値角度THを超えて変化したことに応じて通常操船モードへ移行する。コントローラ30は、通常操船モードにおいて、ステアリング角度と第1の角度位置θLとの差が第1の所定差より小さい場合、または、ステアリング角度と第2の角度位置θRとの差が第2の所定差より小さい場合は、自動操船モードの開始指示がされたとしても自動操船モードへ切り替えない。
【選択図】図6
特許請求の範囲
【請求項1】
左回転方向における回転可能角度が第1の角度位置に規制され且つ右回転方向における回転可能角度が第2の角度位置に規制されたステアリングと、
前記ステアリングの回転角度位置を取得する第1の取得部と、
前記ステアリングの回転操作によらずに自動で操船する自動操船モードの開始指示を取得する第2の取得部と、
通常操船モードにおいて前記開始指示が取得されたことに応じて前記自動操船モードへ移行すると共に、前記自動操船モードにおいて前記ステアリングの回転角度が閾値角度を超えて変化したことに応じて前記通常操船モードへ移行するよう制御する制御部と、を有し、
前記制御部は、前記通常操船モードにおいて、前記第1の取得部により取得された前記ステアリングの回転角度位置と前記第1の角度位置との差が第1の所定差より小さい場合、または、取得された前記ステアリングの回転角度位置と前記第2の角度位置との差が第2の所定差より小さい場合は、前記第2の取得部により前記開始指示が取得されたとしても前記自動操船モードへ移行しない、船舶の操舵制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記制御部は、前記開始指示が取得された場合において前記自動操船モードへ移行しない場合は、その旨を報知する、請求項1に記載の船舶の操舵制御装置。
【請求項3】
前記制御部は、前記自動操船モードへ移行しない旨を報知する際、前記第1の角度位置と前記第2の角度位置との間にある中立位置へ前記ステアリングを戻すよう報知する、請求項2に記載の船舶の操舵制御装置。
【請求項4】
前記制御部は、前記中立位置へ前記ステアリングを戻すよう報知した後、所定時間内に、取得された前記ステアリングの回転角度位置と前記第1の角度位置との差が前記第1の所定差以上で且つ、取得された前記ステアリングの回転角度位置と前記第2の角度位置との差が前記第2の所定差以上となった場合は、前記自動操船モードへ移行する、請求項3に記載の船舶の操舵制御装置。
【請求項5】
前記制御部は、前記第1の所定差および前記第2の所定差を、船速または前記船舶を推進する推進機における駆動源の回転数の少なくとも一方に基づいて決定する、請求項1に記載の船舶の操舵制御装置。
【請求項6】
前記制御部は、前記自動操船モードへ移行した場合は、その旨を報知する、請求項1に記載の船舶の操舵制御装置。
【請求項7】
前記制御部は、前記自動操船モードへ移行した旨を報知する際、前記第1の角度位置と前記第2の角度位置との間にある中立位置へ前記ステアリングを戻すよう報知する、請求項6に記載の船舶の操舵制御装置。
【請求項8】
前記ステアリングの回転操作に対して負荷を発生させる負荷発生部を有し、
前記制御部は、前記自動操船モードへ移行した後、前記第1の角度位置と前記第2の角度位置との間にある中立位置を基準とした所定範囲に前記ステアリングが位置する場合は、前記ステアリングが前記所定範囲に位置しない場合に比べて、前記ステアリングの回転操作に対する負荷が大きくなるよう前記負荷発生部を制御する、請求項1に記載の船舶の操舵制御装置。
【請求項9】
前記ステアリングの回転操作に対して負荷を発生させる負荷発生部を有し、
前記制御部は、前記自動操船モードへ移行した後、前記第1の角度位置と前記第2の角度位置との間にある中立位置を基準とした所定範囲から遠ざかる方向へ前記ステアリングが回転操作される場合は、前記所定範囲に近づく方向へ前記ステアリングが回転操作される場合に比べて、発生する負荷が大きくなるよう前記負荷発生部を制御する、請求項1に記載の船舶の操舵制御装置。
【請求項10】
請求項1乃至9のいずれか1項に記載の船舶の操舵制御装置を備える、船舶。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、船舶の操舵制御装置および方法、並びに船舶に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
船舶において、ステアリング操作によらずに進路を自動制御するなどの自動操船モードを有するものがある。一般に、開始指示の入力により自動操船モードへ移行する。一方、自動操船モードの解除に関して特許文献1、2に開示されている。特許文献1では、船速またはエンジン回転数が所定値より高い場合に自動操船モードが解除される。また、特許文献2では、所定回転以上のステアリングの回転操作があると自動操船モードが解除される。
【0003】
一方、ステアリングの回転可能角度が規制されている船舶がある。このような船舶において、自動操船モードがステアリングの回転操作により解除されるよう構成することが考えられる。
【先行技術文献】
【特許文献】
【0004】
特開平01-141198号公報
特開2015-66979号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ステアリングの回転角度位置が一方の回転規制位置付近にある状態で自動操船モードへ移行した後に、操船者が、自動操船モードの解除を意図して同じ回転方向へステアリングを回転操作する場合が考えられる。この場合、ステアリングは上記一方の回転規制位置を超えて回転することがない。従って、ステアリングを回転操作しようとしても回転せず、意図通りに自動操船モードが解除されないケースが生じる可能性がある。
【0006】
本発明は、常に、ステアリングの回転操作により自動操船モードを解除することができる船舶の操舵制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
この発明の一態様による船舶の操舵制御装置は、左回転方向における回転可能角度が第1の角度位置に規制され且つ右回転方向における回転可能角度が第2の角度位置に規制されたステアリングと、前記ステアリングの回転角度位置を取得する第1の取得部と、前記ステアリングの回転操作によらずに自動で操船する自動操船モードの開始指示を取得する第2の取得部と、通常操船モードにおいて前記開始指示が取得されたことに応じて前記自動操船モードへ移行すると共に、前記自動操船モードにおいて前記ステアリングの回転角度が閾値角度を超えて変化したことに応じて前記通常操船モードへ移行するよう制御する制御部と、を有し、前記制御部は、前記通常操船モードにおいて、前記第1の取得部により取得された前記ステアリングの回転角度位置と前記第1の角度位置との差が第1の所定差より小さい場合、または、取得された前記ステアリングの回転角度位置と前記第2の角度位置との差が第2の所定差より小さい場合は、前記第2の取得部により前記開始指示が取得されたとしても前記自動操船モードへ移行しない。
【0008】
この構成によれば、ステアリングは、左回転方向における回転可能角度が第1の角度位置に規制され且つ右回転方向における回転可能角度が第2の角度位置に規制されている。通常操船モードにおいて自動操船モードの開始指示が取得されたことに応じて前記自動操船モードへ移行すると共に、前記自動操船モードにおいて前記ステアリングの回転角度が閾値角度を超えて変化したことに応じて前記通常操船モードへ移行するよう制御される。前記通常操船モードにおいて、取得された前記ステアリングの回転角度位置と前記第1の角度位置との差が第1の所定差より小さい場合、または、取得された前記ステアリングの回転角度位置と前記第2の角度位置との差が第2の所定差より小さい場合は、前記第2の取得部により前記開始指示が取得されたとしても前記自動操船モードへ移行されない。
【発明の効果】
【0009】
本発明によれば、常に、ステアリングの回転操作により自動操船モードを解除することができる。
【図面の簡単な説明】
【0010】
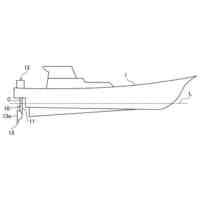
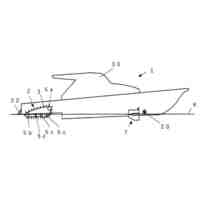
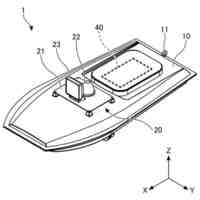
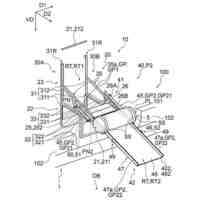
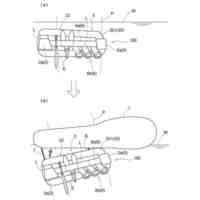
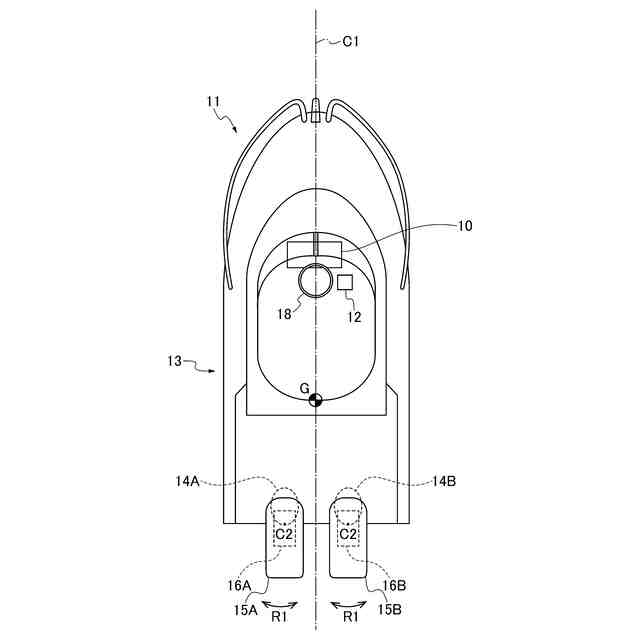
操舵制御装置が適用される船舶の上面図である。
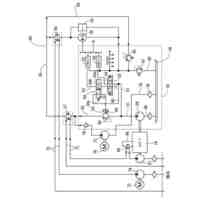
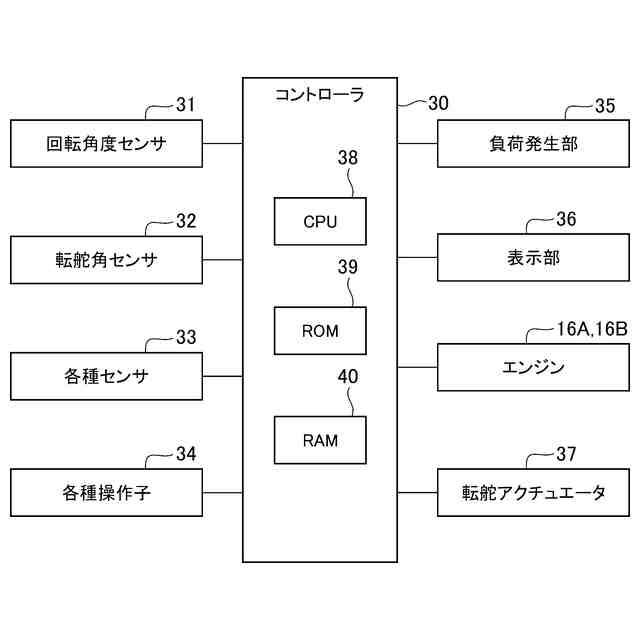
操船システムのブロック図である。
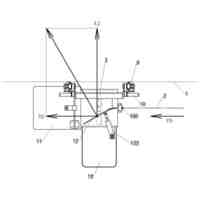
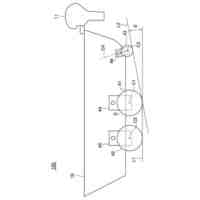
ステアリングホイールをほぼ正面から見た図である。
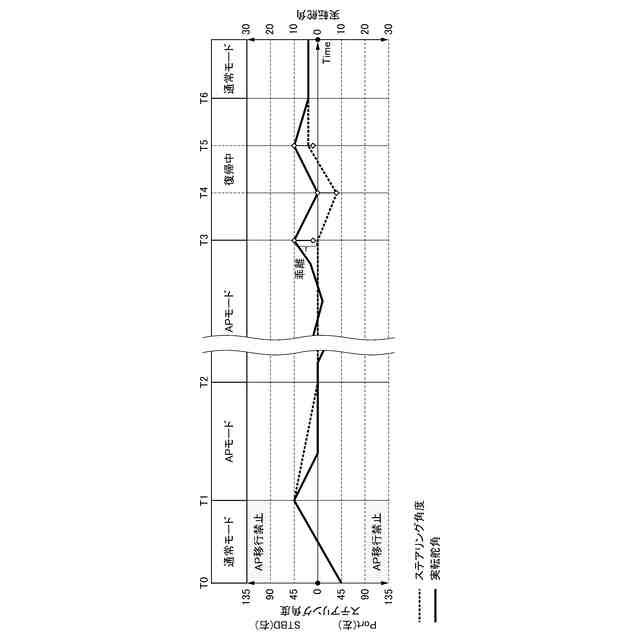
操船モードの遷移を示すタイミングチャートである。
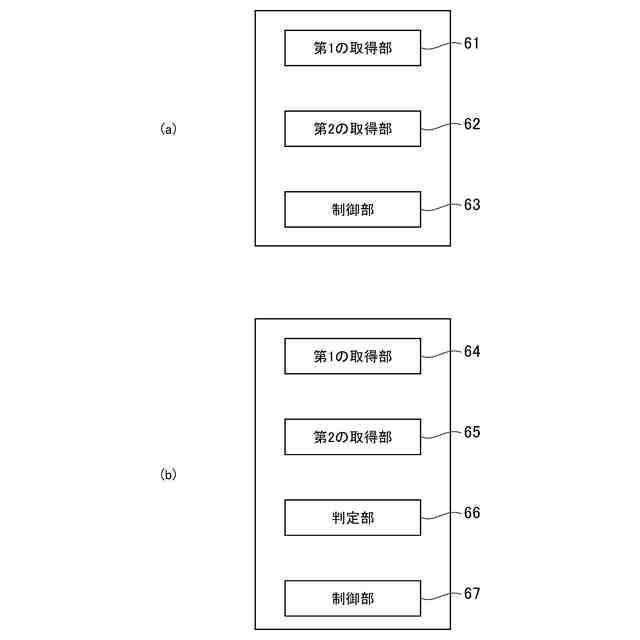
通常操船モード中の制御を実現するための第1の機能ブロック、APモードから通常操船モードに復帰する復帰処理を実現するための第2の機能ブロックを示す図である。
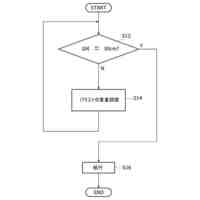
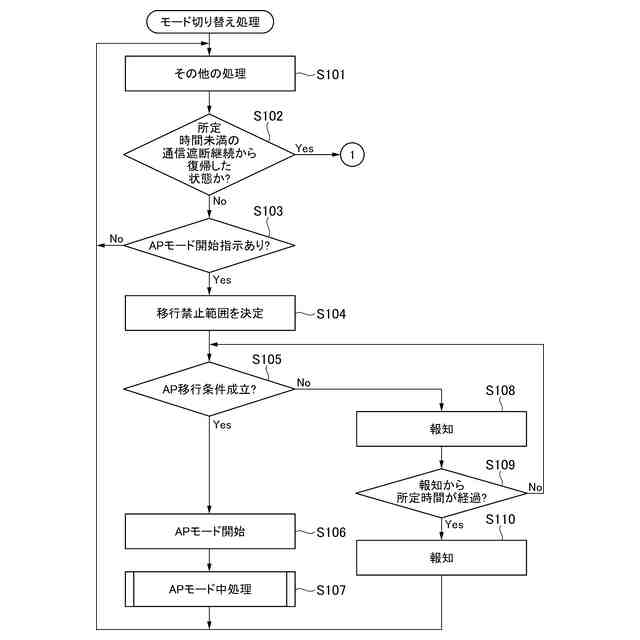
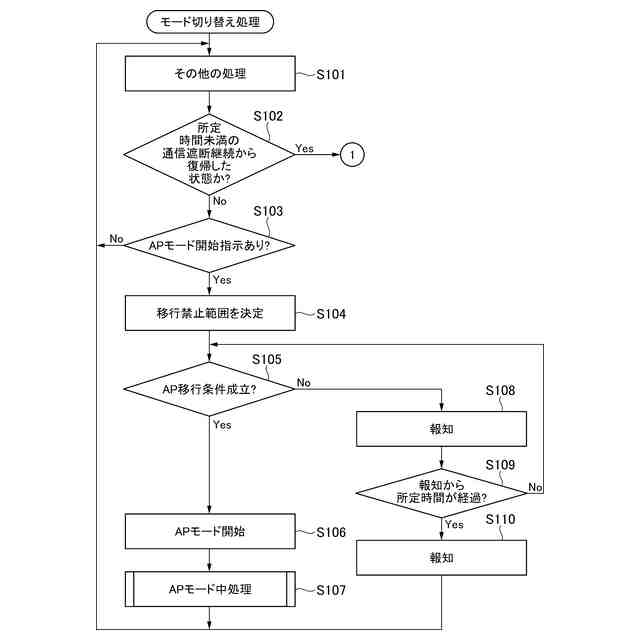
モード切り替え処理のフローチャートである。
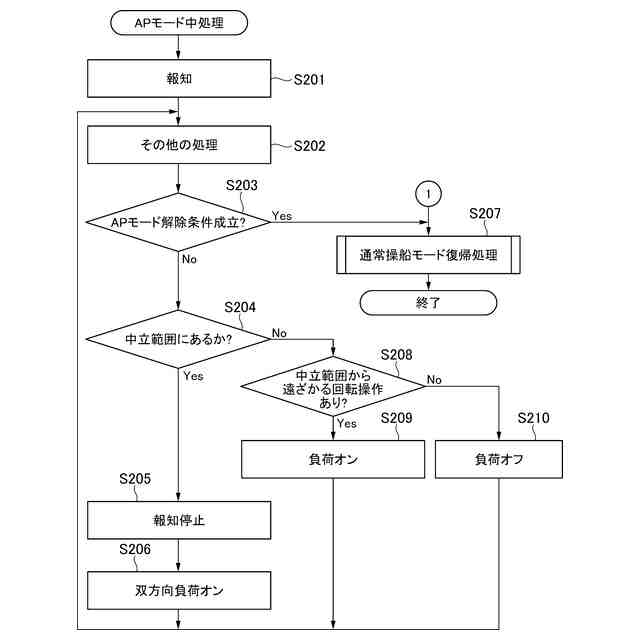
APモード中処理のフローチャートである。
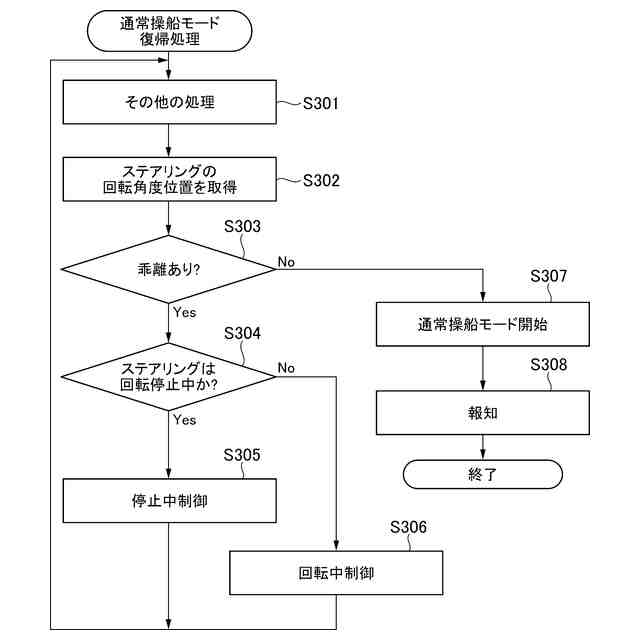
通常操船モード復帰処理のフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
川下り用船
1か月前
個人
シーアンカー
4か月前
個人
発電船
2か月前
個人
水難救命スーツ
11か月前
個人
船舶用プロペラ
10か月前
個人
流体抵抗低減省エネ船
9か月前
小柳建設株式会社
台船
4か月前
個人
簡易型ライフジャケット
11か月前
個人
船舶推進装置
11か月前
ウラカミ合同会社
曳航ロボット
5か月前
炎重工株式会社
浮標
2日前
炎重工株式会社
浮標
2日前
炎重工株式会社
移動体
3か月前
個人
水陸両用移動装置
5か月前
個人
船舶
2日前
ダイハツ工業株式会社
ジャケット
6か月前
株式会社テラサン
位置保持システム
3か月前
常石造船株式会社
メタノール燃料船
1か月前
個人
海洋「いかだ」上の風力発電システム
9か月前
ヤマハ発動機株式会社
船外機
2日前
誠加興業股分有限公司
呼吸用マスク
5か月前
トヨタ自動車株式会社
ガンネル治具
7か月前
個人
浮体式足場のブイ組立体
11か月前
個人
キャタピラ推進式高速船
8か月前
ヤマハ発動機株式会社
救難艇
12か月前
炎重工株式会社
自律航行浮遊体
2日前
株式会社神戸タフ興産
船舶の甲板構造
1か月前
川崎汽船株式会社
ドライアイス輸送船
6か月前
藤倉コンポジット株式会社
架台
23日前
個人
搬送器材
9か月前
株式会社 ASC
航海用低燃費航行方法
10か月前
高階救命器具株式会社
救命具
7か月前
日立造船株式会社
浮体構造物
11か月前
ASTI株式会社
操作機構取付構造
2か月前
株式会社小野田産業
シェルタ
7か月前
株式会社 神崎高級工機製作所
減速逆転機
12か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ