TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024176832
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023095654
出願日
2023-06-09
発明の名称
モデル生成方法、データ収集方法及び制御プログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人秀和特許事務所
主分類
G08G
1/16 20060101AFI20241212BHJP(信号)
要約
【課題】適切な反応速度で移動体の制御を遂行する能力を獲得した訓練済みの機械学習モデルを得るための技術を提供することである。
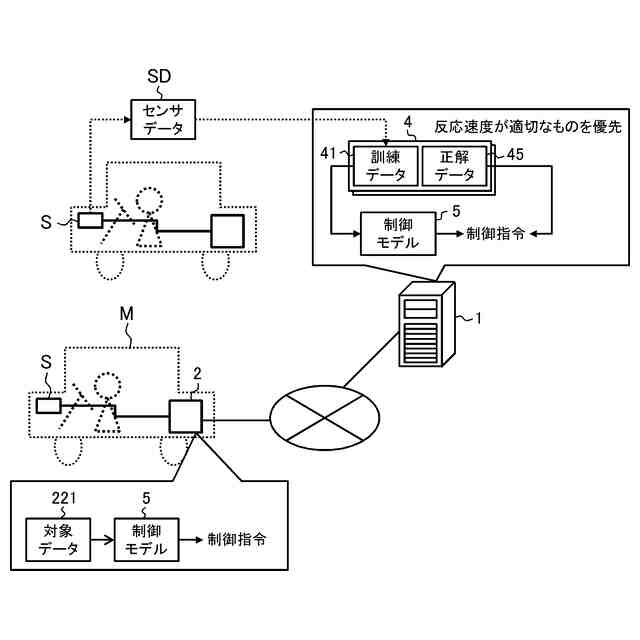
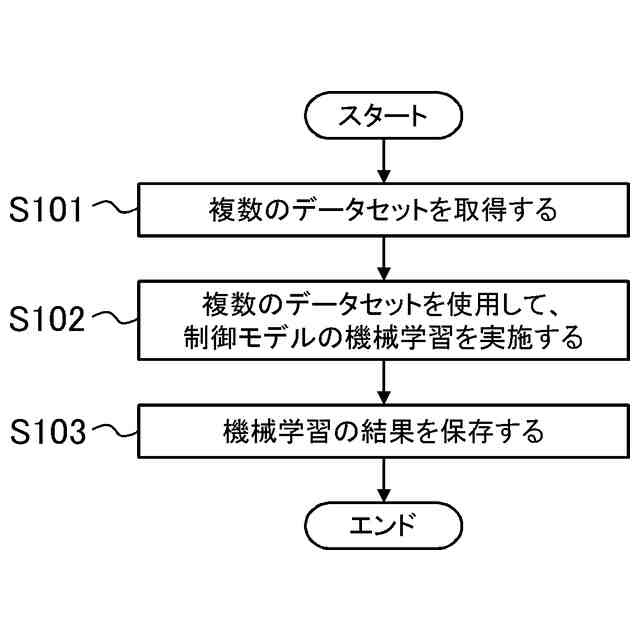
【解決手段】本開示の一側面に係るモデル生成方法は、コンピュータが、訓練データ及び正解データの組み合わせによりそれぞれ構成される複数のデータセットを取得すること、及び取得された複数のデータセットを使用して、制御モデルの機械学習を実施することを含む。複数のデータセットを使用することは、正解データにより示される制御指令のイベントに対する反応速度が所定の条件に適合することで適切と評価されるデータセットほど優先的に使用することを含む。
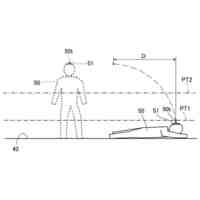
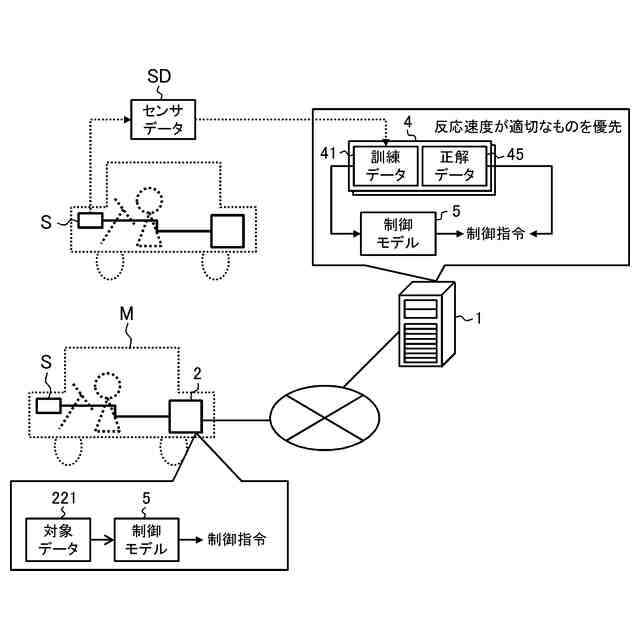
【選択図】図1
特許請求の範囲
【請求項1】
コンピュータにより実行されるモデル生成方法であって、
前記モデル生成方法は、
移動体の移動する環境を時系列に示す訓練データ及び前記環境における前記移動体に対する制御指令を時系列に示す正解データの組み合わせによりそれぞれ構成される複数のデータセットを取得することと、
取得された前記複数のデータセットを使用して、制御モデルの機械学習を実施することと、
を含み、
前記機械学習を実施することは、前記各データセットについて、前記制御モデルを使用して前記移動体の制御指令を前記訓練データから導出した結果が前記正解データに適合するものとなるように前記制御モデルを訓練することを含み、かつ
前記複数のデータセットを使用することは、前記正解データにより示される前記制御指令のイベントに対する反応速度が所定の条件に適合することで適切と評価されるデータセットほど優先的に使用することを含む、
モデル生成方法。
続きを表示(約 1,800 文字)
【請求項2】
前記反応速度が適切と評価されるデータセットほど優先的に使用することは、
前記複数のデータセットのうちの前記反応速度が適切と評価される第1データセットの前記機械学習におけるサンプリング確率を高くし、かつ
前記反応速度が適切と評価されない第2データセットを前記機械学習の対象から除外せず、当該第2データセットの前記機械学習におけるサンプリング確率を前記第1データセットより低くする、
ことにより構成される、
請求項1に記載のモデル生成方法。
【請求項3】
前記移動体は、センサを備え、
前記訓練データは、前記センサにより得られるセンサデータを含み、
前記訓練データにおける前記イベントの開始時刻は、前記センサデータにより特定される、
請求項1又は2に記載のモデル生成方法。
【請求項4】
前記移動体は、車両である、
請求項1又は2に記載のモデル生成方法。
【請求項5】
前記イベントは、先行車両の減速、並走車両のカットイン、駐停車車両の発生、障害物の発生、及び信号機の変化の少なくともいずれかを含む、
請求項4に記載のモデル生成方法。
【請求項6】
前記制御指令は、前記車両の加速、減速及び操舵の少なくともいずれかを含む、
請求項4に記載のモデル生成方法。
【請求項7】
コンピュータにより実行されるデータ収集方法であって、
前記データ収集方法は、
移動体の移動する環境を時系列に示す訓練データ及び前記環境における前記移動体に対する制御指令を時系列に示す正解データの組み合わせによりそれぞれ構成される複数のデータセットを収集することと、
機械学習に使用するために、収集された複数のデータセットを出力することと、
を含み、
前記複数のデータセットを収集することは、前記正解データにより示される前記制御指令のイベントに対する反応速度が所定の条件に適合することで適切と評価されるデータセットほど優先的に収集することを含む、
データ収集方法。
【請求項8】
前記反応速度が適切と評価されるデータセットほど優先的に収集することは、前記コンピュータの記憶領域に一時的に保存されたデータセットのうち、前記所定の条件により前記反応速度が適切であると評価されるデータセットを維持し、前記所定の条件により前記反応速度が適切ではないと評価されるデータセットを削除することにより構成される、
請求項7に記載のデータ収集方法。
【請求項9】
前記複数のデータセットを出力することは、
前記所定の条件により前記反応速度が適切であると評価されるデータセットを外部サーバに送信し、かつ
前記所定の条件により前記反応速度が適切ではないと評価されるデータセットの前記外部サーバへの送信を省略すること、
により構成される、
請求項7に記載のデータ収集方法。
【請求項10】
コンピュータに、
対象の移動体の移動する環境を示す対象データを取得することと、
訓練済みの制御モデルを使用して、取得された対象データから制御指令を導出することと、
前記制御指令を導出した結果に従って、前記対象の移動体の動作を制御することと、
を実行させるための制御プログラムであって、
前記訓練済みの制御モデルは、訓練用の移動体の移動する環境を時系列に示す訓練データ及び前記環境における前記訓練用の移動体に対する制御指令を時系列に示す正解データの組み合わせによりそれぞれ構成される複数のデータセットを使用した機械学習を実施することにより生成されたものであり、
前記機械学習を実施することは、前記各データセットについて、前記制御モデルを使用して前記移動体の制御指令を前記訓練データから導出した結果が前記正解データに適合するものとなるように前記制御モデルを訓練することを含み、かつ
前記複数のデータセットを前記機械学習に使用することは、前記正解データにより示される前記制御指令のイベントに対する反応速度が所定の条件に適合することで適切と評価されるデータセットほど前記機械学習に優先的に使用することを含む、
制御プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、モデル生成方法、データ収集方法及び制御プログラムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
特許文献1には、運転操作を示す情報及び当該運転操作時における運転状況を示す情報を取得し、取得された情報に基づいて運転状況が学習に適切であるか否かを判定し、並びに不適切と判定された運転状況における運転操作を学習の対象外と判定するように構成された運転支援装置が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-127207号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示の目的は、適切な反応速度で移動体の制御を遂行する能力を獲得した訓練済みの機械学習モデルが得られる蓋然性を高めるための技術又はそれにより得られた訓練済みの機械学習モデルを使用した移動体の制御技術を提供することである。
【課題を解決するための手段】
【0005】
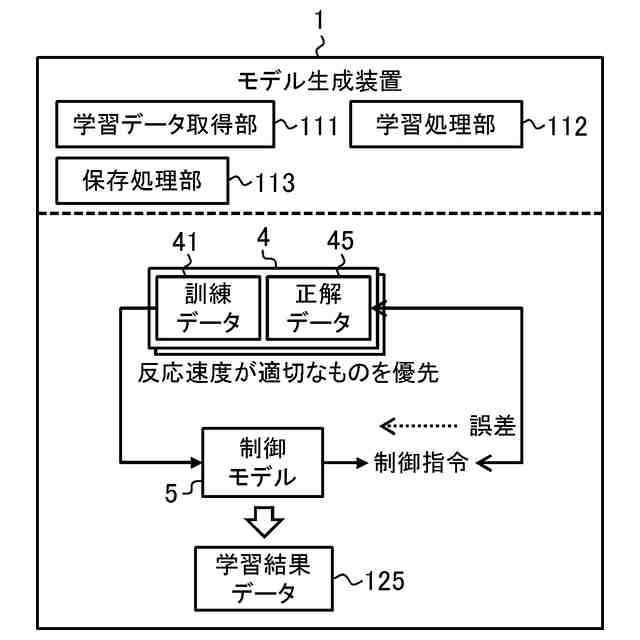
本開示の第1の態様に係るモデル生成方法は、コンピュータにより実行される。当該モデル生成方法は、移動体の移動する環境を時系列に示す訓練データ及び前記環境における前記移動体に対する制御指令を時系列に示す正解データの組み合わせによりそれぞれ構成される複数のデータセットを取得することと、取得された前記複数のデータセットを使用して、制御モデルの機械学習を実施することと、を含む。前記機械学習を実施することは、前記各データセットについて、前記制御モデルを使用して前記移動体の制御指令を前記訓練データから導出した結果が前記正解データに適合するものとなるように前記制御モデルを訓練することを含む。そして、前記複数のデータセットを使用することは、前記正解データにより示される前記制御指令のイベントに対する反応速度が所定の条件に適合することで適切と評価されるデータセットほど優先的に使用することを含む。制御モデルは、ニューラルネットワークにより構成されてよい。
【0006】
本開示の第2の態様に係るデータ収集方法は、コンピュータにより実行される。当該データ収集方法は、移動体の移動する環境を時系列に示す訓練データ及び前記環境における前記移動体に対する制御指令を時系列に示す正解データの組み合わせによりそれぞれ構成される複数のデータセットを収集することと、機械学習に使用するために、収集された複数のデータセットを出力することと、を含む。そして、前記複数のデータセットを収集することは、前記正解データにより示される前記制御指令のイベントに対する反応速度が所定の条件に適合することで適切と評価されるデータセットほど優先的に収集することを含む。
【0007】
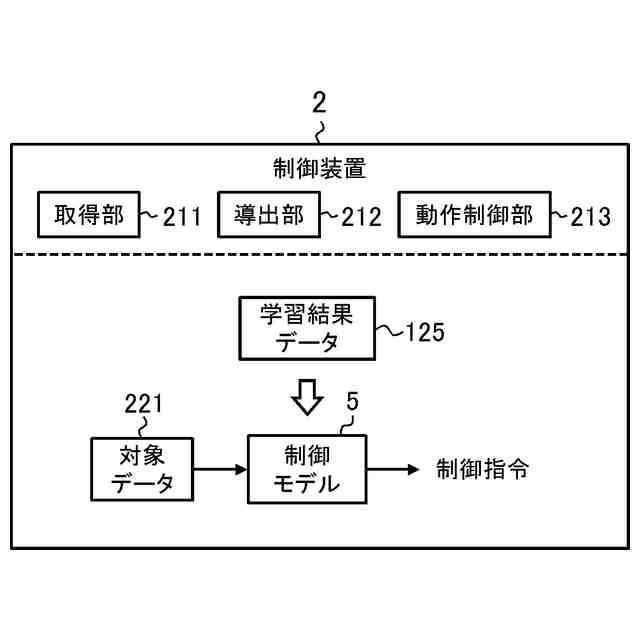
本開示の第3の態様に係る制御プログラムは、コンピュータに、対象の移動体の移動する環境を示す対象データを取得することと、訓練済みの制御モデルを使用して、取得された対象データから制御指令を導出することと、前記制御指令を導出した結果に従って、前記対象の移動体の動作を制御することと、を実行させるためのプログラムである。前記訓練済みの制御モデルは、訓練用の移動体の移動する環境を時系列に示す訓練データ及び前記環境における前記訓練用の移動体に対する制御指令を時系列に示す正解データの組み合
わせによりそれぞれ構成される複数のデータセットを使用した機械学習を実施することにより生成されたものである。前記機械学習を実施することは、前記各データセットについて、前記制御モデルを使用して前記移動体の制御指令を前記訓練データから導出した結果が前記正解データに適合するものとなるように前記制御モデルを訓練することを含む。そして、前記複数のデータセットを前記機械学習に使用することは、前記正解データにより示される前記制御指令のイベントに対する反応速度が所定の条件に適合することで適切と評価されるデータセットほど前記機械学習に優先的に使用することを含む。
【発明の効果】
【0008】
本開示によれば、適切な反応速度で移動体の制御を遂行する能力を獲得した訓練済みの機械学習モデルが得られる蓋然性を高めるための技術又はそれにより得られた訓練済みの機械学習モデルを使用した移動体の制御技術を提供することができる。
【図面の簡単な説明】
【0009】
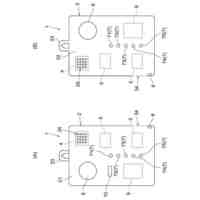
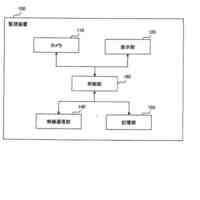
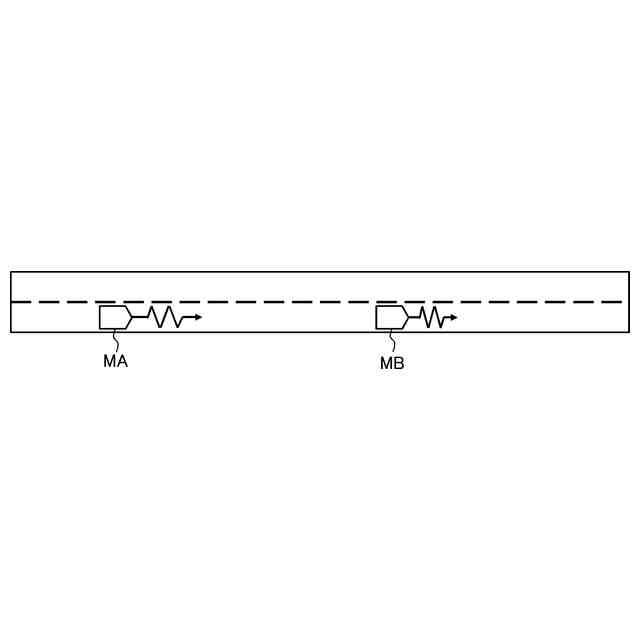
図1は、本開示が適用される場面の一例を模式的に示す。
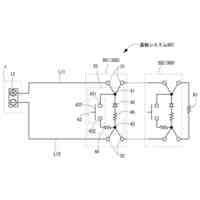
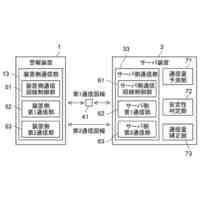
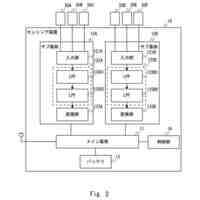
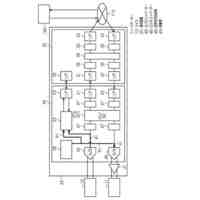
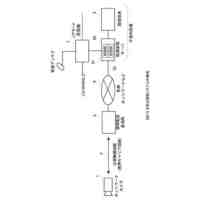
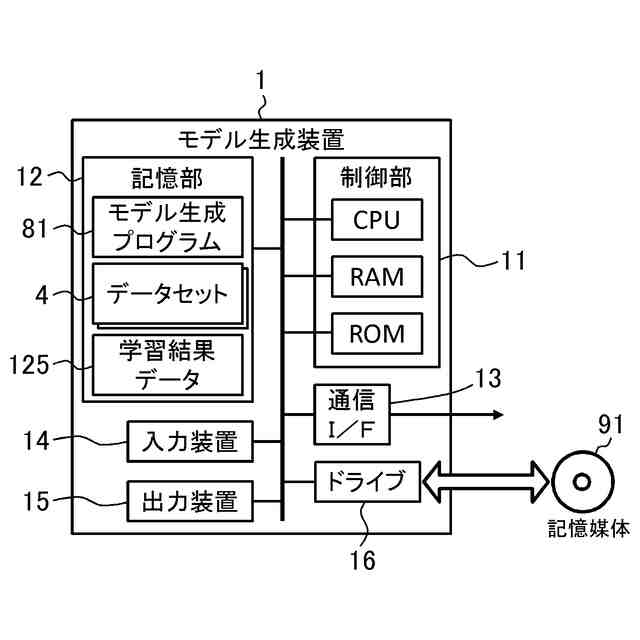
図2は、実施の形態に係るモデル生成装置のハードウェア構成の一例を模式的に示す。
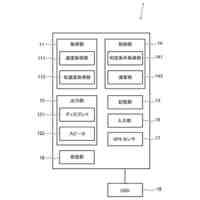
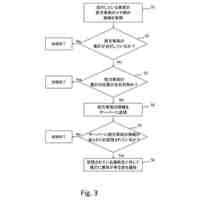
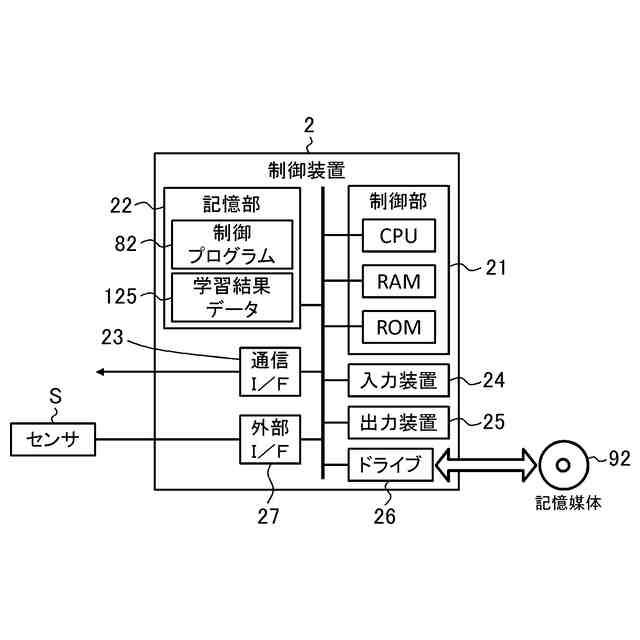
図3は、実施の形態に係る制御装置のハードウェア構成の一例を模式的に示す。
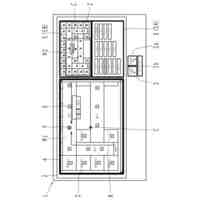
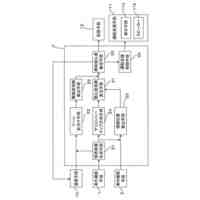
図4は、実施の形態に係るモデル生成装置のソフトウェア構成の一例を模式的に示す。
図5は、実施の形態に係る制御装置のソフトウェア構成の一例を模式的に示す。
図6は、実施の形態に係るモデル生成装置による制御モデルの機械学習に関する処理手順の一例を示すフローチャートである。
図7Aは、実施の形態に係るイベントの一例を模式的に示す。
図7Bは、図7Aのイベントにおける反応速度を評価する手法の一例を模式的に示す。
図8Aは、実施の形態に係るイベントの一例を模式的に示す。
図8Bは、図8Aのイベントにおける反応速度を評価する手法の一例を模式的に示す。
図9は、実施の形態に係るイベントの一例を模式的に示す。
図10Aは、実施の形態に係るイベントの一例を模式的に示す。
図10Bは、図10Bのイベントにおける反応速度を評価する手法の一例を模式的に示す。
図11Aは、実施の形態において、所定の条件により反応速度が適切と評価されるデータセットほど優先的に使用することの一例を模式的に示す。
図11Bは、実施の形態において、所定の条件により反応速度が適切と評価されるデータセットほど優先的に使用することの一例を模式的に示す。
図12は、実施の形態に係る制御装置による移動体の動作制御に関する処理手順の一例を示すフローチャートである。
図13は、本開示が適用される他の場面の一例を模式的に示す。
図14は、他の形態に係るデータ収集装置のハードウェア構成の一例を模式的に示す。
図15は、他の形態に係るデータ収集装置のソフトウェア構成の一例を模式的に示す。
図16は、他の形態に係るデータ収集装置によるデータ収集に関する処理手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0010】
特許文献1により提案される方法によれば、不適切と判定された運転状況における運転操作を学習の対象外とすることで、適切な運転操作のみを実行する能力を獲得した自動運転モデルが生成されることを期待することができる。しかしながら、本件発明者らは、従来の方法には次のような問題点があることを見出した。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
火器使用警報装置
1か月前
ニッタン株式会社
煙感知器
15日前
大阪瓦斯株式会社
警報装置
2か月前
能美防災株式会社
表示灯カバー
9日前
ホーチキ株式会社
通報システム
2か月前
アズビル株式会社
測定システム
1か月前
ニッタン株式会社
発信機
1か月前
株式会社SUBARU
車載装置
2か月前
株式会社大林組
誘導装置
2か月前
株式会社小糸製作所
転倒検知装置
2か月前
ニッタン株式会社
煙感知器
2か月前
大阪瓦斯株式会社
音声出力システム
2か月前
株式会社SUBARU
運転支援装置
2か月前
能美防災株式会社
非常放送システム
10日前
日本無線株式会社
人物探索システム
23日前
京セラ株式会社
案内システム及び案内方法
23日前
株式会社ブリッツ
車両情報処理装置
2か月前
株式会社日本製鋼所
センシング装置
2か月前
大阪瓦斯株式会社
音声出力システム
2か月前
日本信号株式会社
情報提供システム
1か月前
大阪瓦斯株式会社
音声出力システム
2か月前
大阪瓦斯株式会社
音声出力システム
2か月前
大阪瓦斯株式会社
音声出力システム
2か月前
綜合警備保障株式会社
警備システム
2か月前
株式会社CCT
監視装置及び監視方法
2か月前
個人
安全に飛び乗りが可能な低速自動運転車
1か月前
トヨタ自動車株式会社
通信装置
2か月前
ニッタン株式会社
火災感知端末
2か月前
ニッタン株式会社
火災感知端末
2か月前
トヨタ自動車株式会社
運転支援システム
15日前
能美防災株式会社
防災表示盤
2か月前
トヨタ車体株式会社
運転支援装置
2か月前
株式会社F2Fグループ
疲労度判定方法
1か月前
株式会社ユピテル
システムおよびプログラム等
2か月前
株式会社日立国際電気
防災無線システム
2か月前
マツダ株式会社
興味関心度推定装置
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ