TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024173100
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023091249
出願日
2023-06-01
発明の名称
クレーン
出願人
株式会社タダノ
代理人
弁理士法人矢野内外国特許事務所
主分類
B66C
23/90 20060101AFI20241205BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】荷物を吊り下げたときの具体的なブームの作業半径およびたわみ量を容易に把握することができるクレーンを提供する。
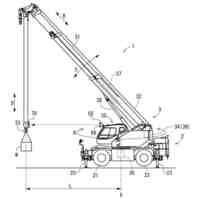
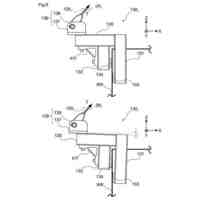
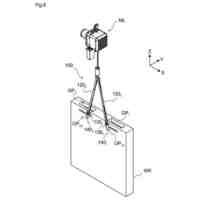
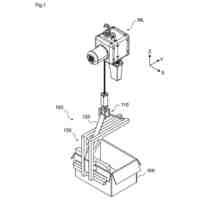
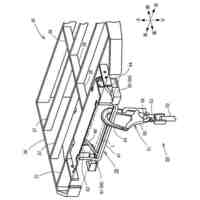
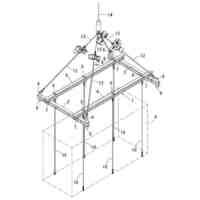
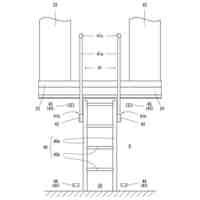
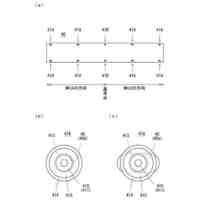
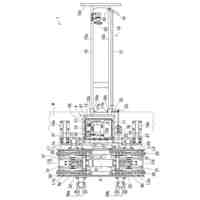
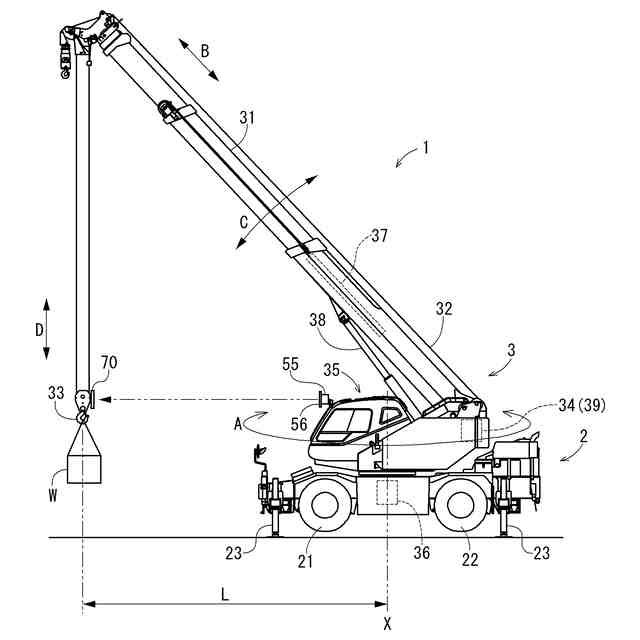
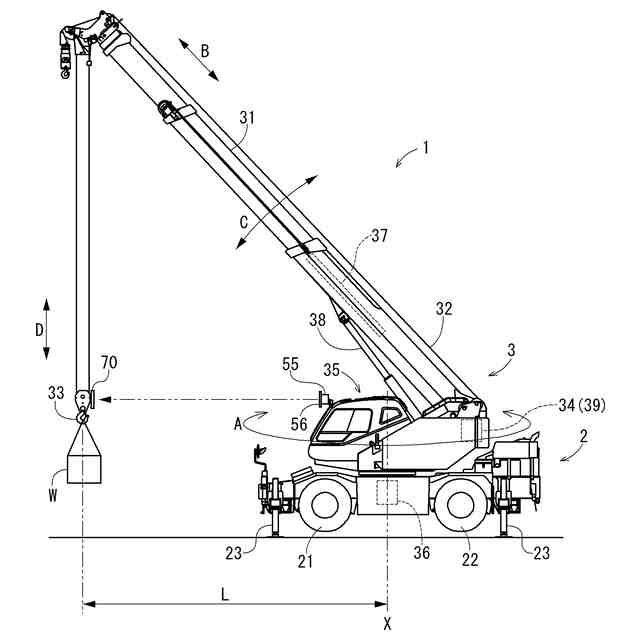
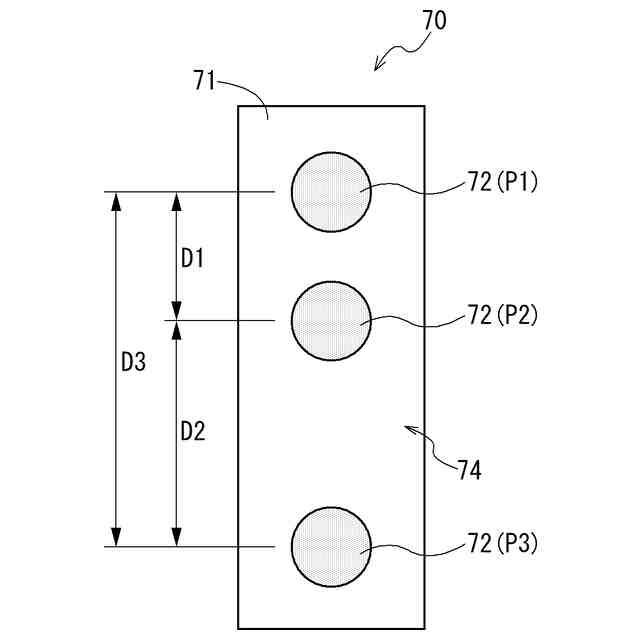
【解決手段】旋回体3と、旋回体3に支持されるブーム31と、ブーム31から垂下するワイヤロープ32と、ワイヤロープ32に取り付けられるフック33と、フック33または荷物Wに取り付けられ、ドット模様74を有するマーカ70と、旋回体3に取り付けられ、マーカ70を撮影可能なカメラ55と、ドット模様74を記憶し、カメラ55により撮影した撮影画像PTを処理可能なコントローラ40とを備え、カメラ55はフック33に荷物Wを吊り下げた状態でマーカWを撮影し、コントローラ40は、ドット模様74と、撮影画像PTに映るドット模様像74PTと、カメラ55の光学特性とを用いて、マーカ70の三次元位置を特定し、特定したマーカ70の三次元位置に基づいて、ブーム31の作業半径Lおよび横たわみ量Fを算出する。
【選択図】図1
特許請求の範囲
【請求項1】
車体と、
前記車体に支持されるブームと、
前記ブームから垂下するワイヤロープと、
前記ワイヤロープの巻き入れおよび巻き出しによって昇降するフックと、
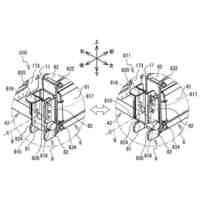
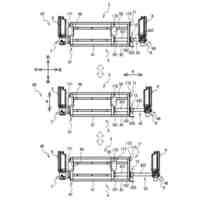
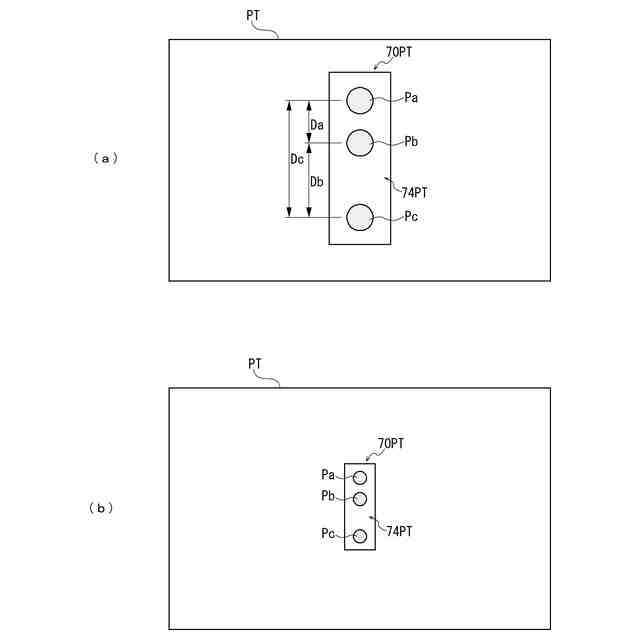
前記フックまたは前記フックに吊り下げられた荷物に取り付けられ、ドット模様を形成する複数の発光装置を有するマーカと、
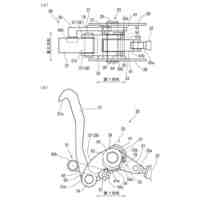
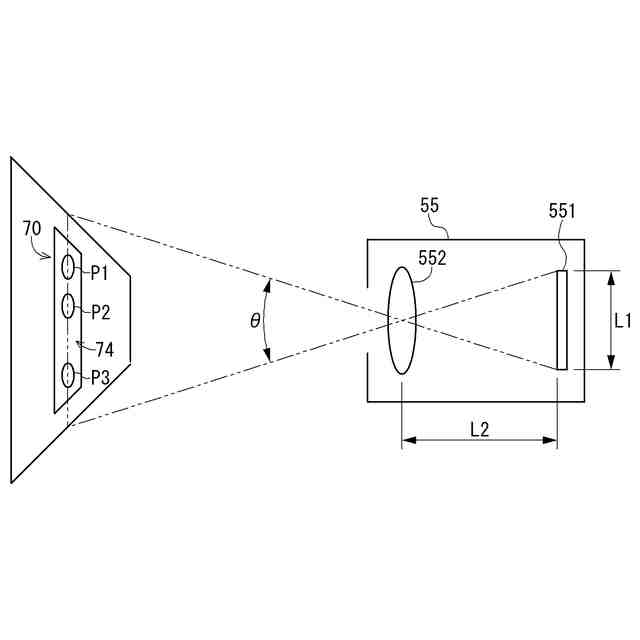
前記車体に取り付けられ、前記マーカを撮影可能なカメラと、
前記マーカの前記ドット模様を記憶するとともに、前記カメラにより撮影した撮影画像を処理可能なコントローラと、
を備え、
前記カメラは、前記フックに荷物を吊り下げた状態で、前記マーカを撮影し、
前記コントローラは、
前記マーカの前記ドット模様と、前記マーカを撮影した撮影画像に表されるマーカ像のドット模様像と、前記カメラの光学特性とを用いて、前記マーカの三次元位置を特定し、
特定した前記マーカの三次元位置に基づいて、前記ブームの作業半径および前記ブームの横たわみ量を算出することを特徴とするクレーン。
続きを表示(約 1,400 文字)
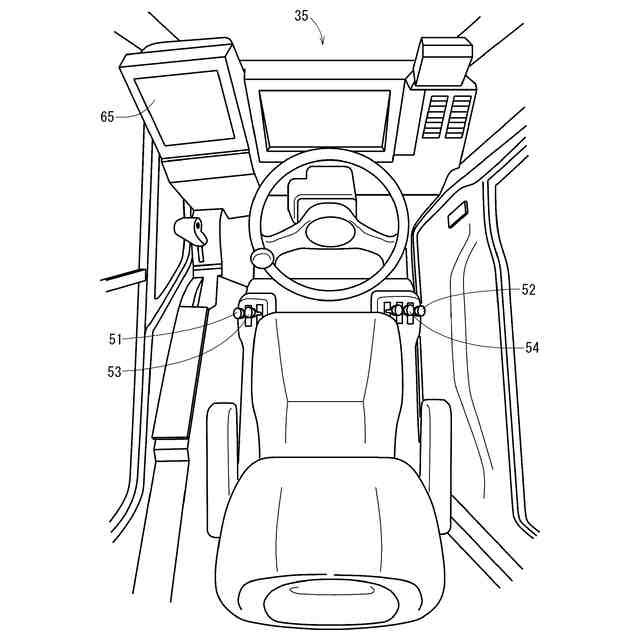
【請求項2】
前記カメラは、複数のタイミングにおいて前記マーカを撮影し、
前記コントローラは、
複数のタイミングにおいて撮影した前記撮影画像について、それぞれ前記ブームの前記作業半径および前記横たわみ量を算出し、
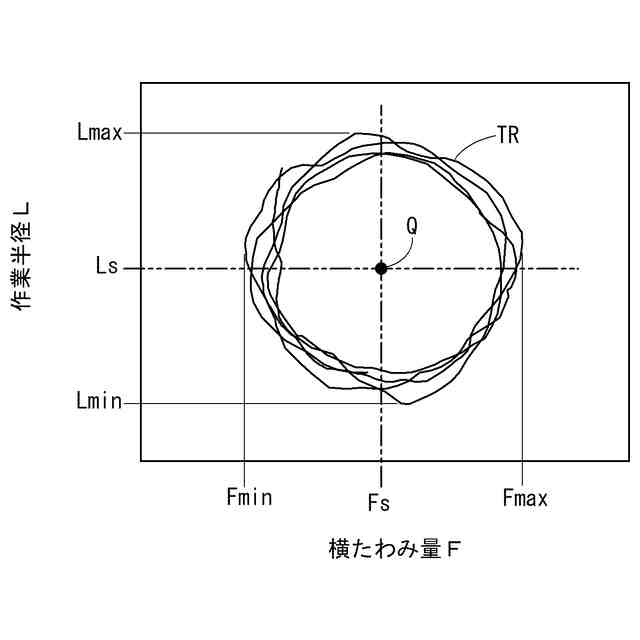
前記カメラを、算出される前記作業半径の値および前記横たわみ量の値が、それぞれ経時的に少なくとも1回極小値および極大値を示す時間にわたって前記マーカを撮影するように制御し、
算出された複数の前記作業半径の最大値と最小値との平均値を、前記フックが静止しているときの前記ブームの静止作業半径として算出し、
算出された複数の前記横たわみ量の最大値と最小値との平均値を、前記フックが静止しているときの前記ブームの静止横たわみ量として算出する請求項1に記載のクレーン。
【請求項3】
前記カメラは、複数のタイミングにおいて前記マーカを撮影し、
前記コントローラは、
複数のタイミングにおいて撮影した前記撮影画像について、それぞれ前記ブームの前記作業半径および前記横たわみ量を算出し、
前記カメラを、算出される前記作業半径の値および前記横たわみ量の値が、それぞれ経時的に少なくとも1回極小値および極大値を示す時間にわたって前記マーカを撮影するように制御し、
算出した複数の前記作業半径について、前記作業半径を複数の区間に分割した第1階級と、前記第1階級に対応する第1度数との関係を表した第1ヒストグラムを作成し、作成した前記第1ヒストグラムに基づいて前記フックが静止しているときの静止作業半径を算出し、
算出した複数の前記横たわみ量について、前記横たわみ量を複数の区間に分割した第2階級と、前記第2階級に対応する第2度数との関係を表した第2ヒストグラムを作成し、作成した前記第2ヒストグラムに基づいて前記フックが静止しているときの静止横たわみ量を算出する請求項1に記載のクレーン。
【請求項4】
前記コントローラは、
前記第1ヒストグラムにおける中央値または平均値を前記静止作業半径として算出し、
前記第2ヒストグラムにおける中央値または平均値を前記静止横たわみ量として算出する請求項3に記載のクレーン。
【請求項5】
前記コントローラは、
前記第1ヒストグラムにおける特異値を除去した後に、前記静止作業半径を算出し、
前記第2ヒストグラムにおける特異値を除去した後に、前記静止横たわみ量を算出する請求項4に記載のクレーン。
【請求項6】
前記カメラは、たわみが生じていない前記ブームの水平方向における延びる向きを撮影方向とした状態で前記車体に取り付けられ、
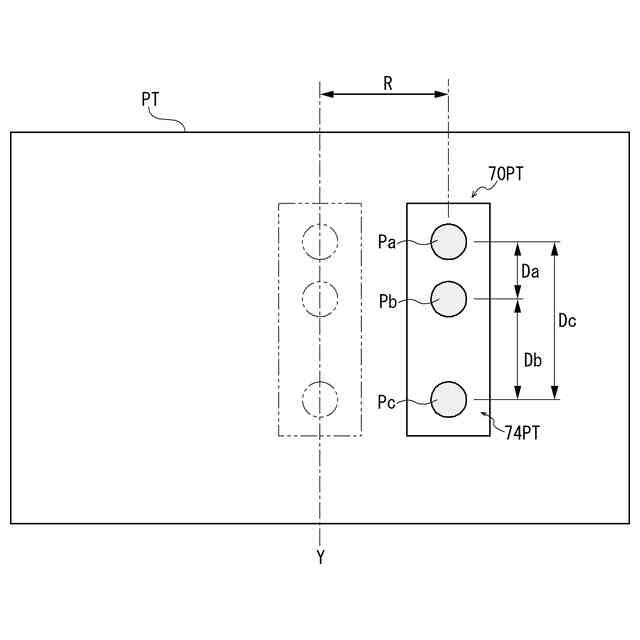
前記コントローラは、前記ブームの前記横たわみ量を、前記撮影画像における水平方向の中心に対する、前記マーカ像の水平方向のずれ量に基づいて求める請求項1に記載のクレーン。
【請求項7】
前記コントローラは、前記カメラから前記マーカまでの水平方向の距離に基づいて、前記ブームの前記作業半径を求める請求項1に記載のクレーン。
【請求項8】
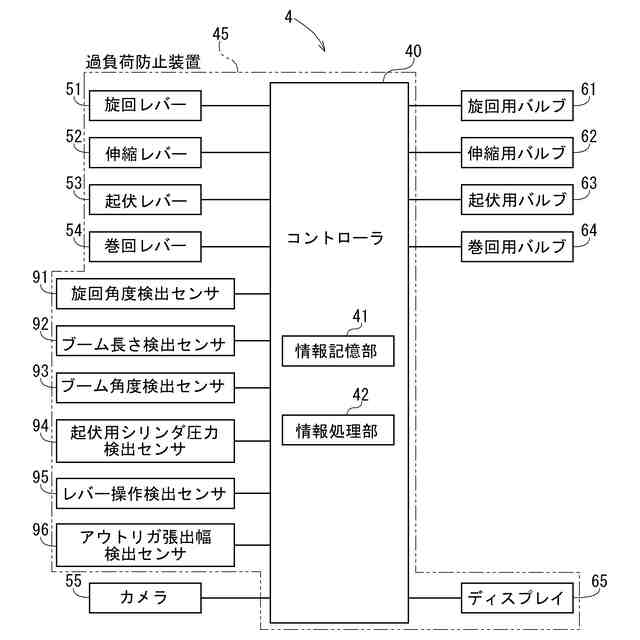
前記コントローラは、算出した前記ブームの前記静止作業半径と、前記ブームの前記静止横たわみ量とを、クレーンにかかる作業モーメントが過大になることを抑制するための過負荷防止装置に反映させる請求項2~請求項7の何れか一項に記載のクレーン。
発明の詳細な説明
【技術分野】
【0001】
本発明は、クレーンに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、クレーンには、クレーンにかかる作業モーメントが過大になることを抑制するための過負荷防止装置が搭載されたものがある。
【0003】
一方、ブームから垂下するワイヤロープに取り付けられたフックに荷物を吊り下げて作業を行うときには、ブームにたわみが生じることがあるため、クレーンにかかる作業モーメントを過負荷防止装置によって精度良く検出するためには、ブームに生じたたわみに関する情報を把握して、過負荷防止装置に反映させることが好ましい。
【0004】
従って、特許文献1には、光線を発する送信器と光線を受信する受信器とを、ブームの長さ方向に沿って離間して設け、ブームに所定の閾値を超えるたわみが生じると、送信器から発せられた光線が受信器によって受信されなくなるように構成することで、閾値を超えるたわみがブームに生じたことを把握可能とした技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2020-97487号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、上述の特許文献1に記載の技術においては、ブームに所定の閾値を超えるたわみが生じたことを把握することはできるが、ブームの具体的なたわみ量を把握することはできず、ひいては荷物を吊り下げたときのブームの作業半径を把握することは困難であった。
【0007】
そこで、本発明においては、荷物を吊り下げたときの具体的なブームの作業半径およびたわみ量を容易に把握することができるクレーンを提供する。
【課題を解決するための手段】
【0008】
上記課題を解決するクレーンは、以下の特徴を有する。
【0009】
即ち、クレーンは、車体と、前記車体に支持されるブームと、前記ブームから垂下するワイヤロープと、前記ワイヤロープの巻き入れおよび巻き出しによって昇降するフックと、前記フックまたは前記フックに吊り下げられた荷物に取り付けられ、ドット模様を形成する複数の発光装置を有するマーカと、前記車体に取り付けられ、前記マーカを撮影可能なカメラと、前記マーカの前記ドット模様を記憶するとともに、前記カメラにより撮影した撮影画像を処理可能なコントローラと、を備え、前記カメラは、前記フックに荷物を吊り下げた状態で、前記マーカを撮影し、前記コントローラは、前記マーカの前記ドット模様と、前記マーカを撮影した撮影画像に表されるマーカ像のドット模様像と、前記カメラの光学特性とを用いて、前記マーカの三次元位置を特定し、特定した前記マーカの三次元位置に基づいて、前記ブームの作業半径および前記ブームの横たわみ量を算出する。
【0010】
これにより、フックに荷物を吊り下げたときの具体的なブームの作業半径およびたわみ量を容易に把握することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社タダノ
クレーン
29日前
株式会社タダノ
クレーン装置
3日前
株式会社タダノ
軌陸車の昇降ステップ
15日前
株式会社タダノ
ポストブームのリブ構造体
29日前
株式会社タダノ
地切り制御装置、及び、移動式クレーン
1か月前
個人
懸吊装置
4か月前
ユニパルス株式会社
吊具
11か月前
ユニパルス株式会社
吊具
6か月前
ユニパルス株式会社
吊具
10か月前
個人
海上コンテナ昇降装置
29日前
ユニパルス株式会社
吊具装置
1か月前
ユニパルス株式会社
荷役装置
1日前
株式会社豊田自動織機
荷役車両
9か月前
株式会社豊田自動織機
荷役車両
10か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社豊田自動織機
荷役車両
5か月前
株式会社豊田自動織機
荷役車両
17日前
株式会社豊田自動織機
荷役車両
8か月前
株式会社日本キャリア工業
昇降機
4か月前
ユニパルス株式会社
荷役助力装置
8か月前
株式会社北川鉄工所
吊荷制御方法
10か月前
個人
建築部材の吊り上げ装置
2か月前
株式会社大林組
養生方法
3か月前
株式会社ニシキ
可変型吊り天秤
7か月前
フジテック株式会社
エレベータ
10か月前
株式会社豊田自動織機
フォークリフト
6か月前
大同特殊鋼株式会社
治具
9か月前
フジテック株式会社
エレベータ
11か月前
フジテック株式会社
エレベータ
11か月前
フジテック株式会社
乗客搬送装置
11か月前
小野谷機工株式会社
ジャッキ装置
6か月前
株式会社キトー
吊具
4か月前
ブラザー工業株式会社
架台
6か月前
有限会社サエキ
玉掛用器具
23日前
ブラザー工業株式会社
架台
6か月前
ウエダ産業株式会社
鋼板保持装置
5か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ