TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024170050
公報種別
公開特許公報(A)
公開日
2024-12-06
出願番号
2023086993
出願日
2023-05-26
発明の名称
ロボット用アクチュエータ
出願人
株式会社ミツバ
代理人
個人
,
個人
,
個人
主分類
B25J
17/00 20060101AFI20241129BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットの腕を細くできるロボット用アクチュエータを提供する。
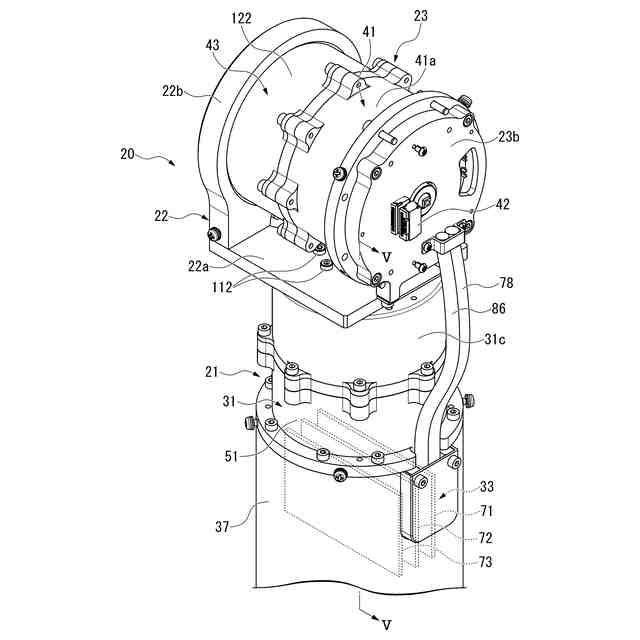
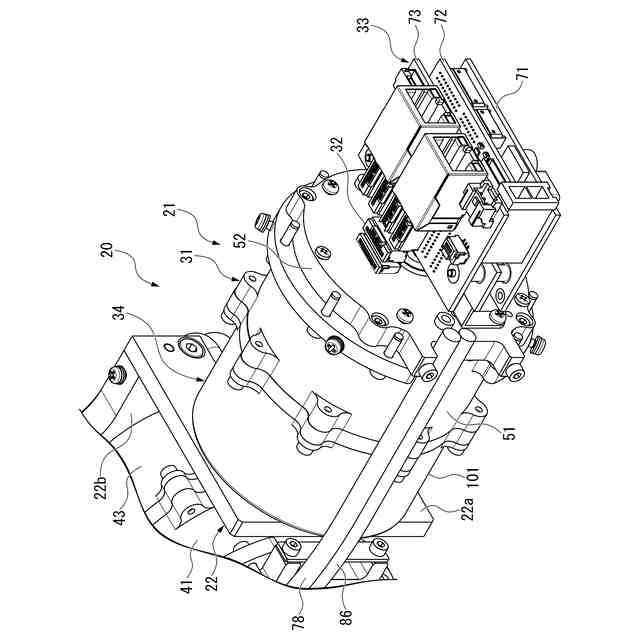
【解決手段】本発明に係るロボット用アクチュエータ20は、第1モータ31が設けられた第1モータユニット21と、第1モータユニット21の第1出力軸に取り付けられたブラケット22と、ブラケット22に取り付けられ、第1出力軸に対して直交する第2出力軸が設けられた第2モータユニット23と、第1モータユニット21に設けられて、第1モータ31と第2モータユニット23に設けられた第2モータ41とを制御するドライバ33と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
第1モータが設けられた第1モータユニットと、
前記第1モータユニットの第1出力軸に取り付けられたブラケットと、
前記ブラケットに取り付けられ、前記第1出力軸に対して交差する第2出力軸が設けられた第2モータユニットと、
前記第1モータユニットに設けられて、前記第1モータと前記第2モータユニットに設けられた第2モータとを制御する制御基板と、
を備える、
ことを特徴とするロボット用アクチュエータ。
続きを表示(約 830 文字)
【請求項2】
前記制御基板は、前記第1出力軸に沿って配置されている、
ことを特徴とする請求項1に記載のロボット用アクチュエータ。
【請求項3】
前記第2モータにおいて前記第2出力軸の反対側に設けられた回転検出部と、
前記制御基板に接続され、前記第1モータの外周面を経て前記第2モータの前記回転検出部側に接続されたケーブルと、
を備え、
前記第2モータユニットは、前記第1出力軸の中心から第2出力軸側の端面までの距離よりも、前記第1出力軸の中心から前記回転検出部側の端面までの距離が短くなるように、前記第1出力軸に対して交差するように配置されている、
ことを特徴とする請求項2に記載のロボット用アクチュエータ。
【請求項4】
前記回転検出部側の端面は、前記第1出力軸を中心とする径方向において前記外周面と同じ位置に配置されている、
ことを特徴とする請求項3に記載のロボット用アクチュエータ。
【請求項5】
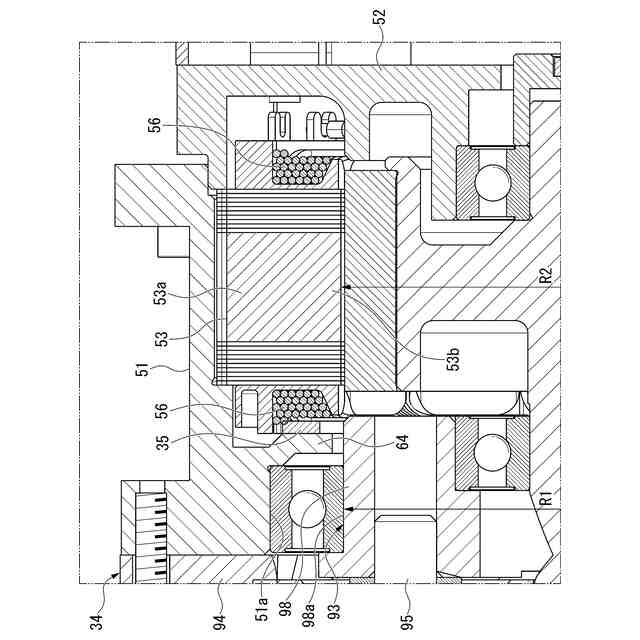
前記第1モータにおける第1ステータの内径より外径が小さい第1キャリアを有する第1遊星減速機と、
前記第1モータの第1コイルと前記第1モータの第1モータケースとに接触された第1熱伝導シートと、
前記第2モータにおける第2ステータの内径より外径が小さい第2キャリアを有する第2遊星減速機と、
前記第2モータの第2コイルと前記第2モータの第2モータケースとに接触された第2熱伝導シートと、
を備える、
ことを特徴とする請求項1に記載のロボット用アクチュエータ。
【請求項6】
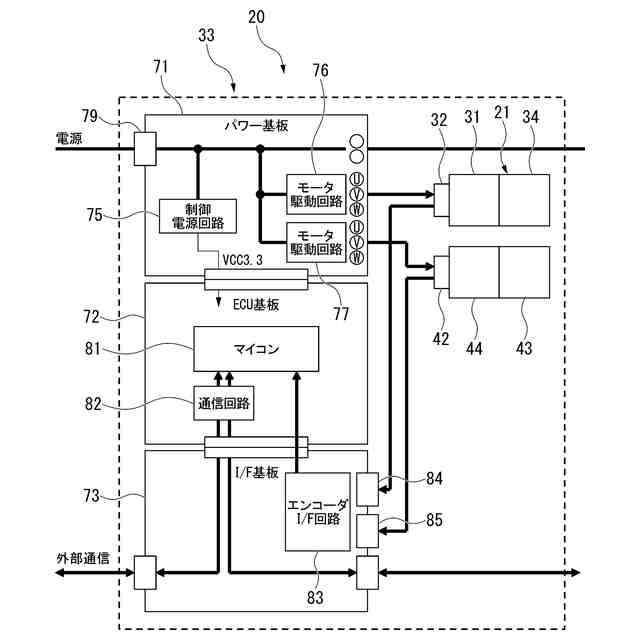
前記制御基板は、パワー基板及びECU基板を備え、
前記パワー基板には、前記第1モータ及び前記第2モータに電圧と電流とを供給する制御電源回路が接続されている、
ことを特徴とする請求項2に記載のロボット用アクチュエータ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット用アクチュエータに関するものである。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
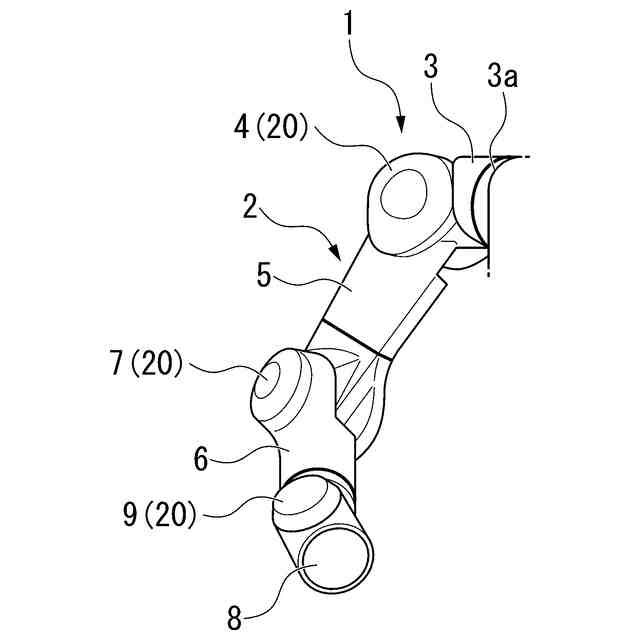
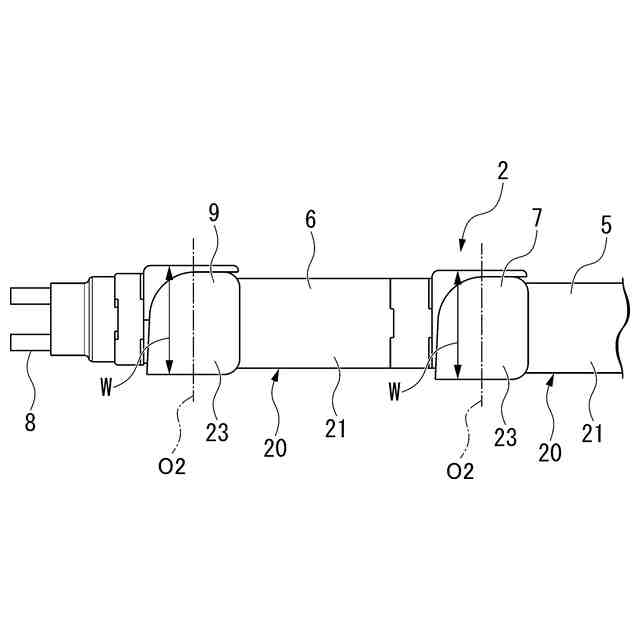
ロボットの多関節アームを構成する2軸駆動用のアクチュエータとして、例えば2つのモータユニットが組み合わされたものが使用される。モータユニットとしては、モータ、コントローラ(ドライバ)、エンコーダ、及び減速機がまとめられたものが知られている(例えば、特許文献1,2参照)。
【先行技術文献】
【特許文献】
【0003】
特開2019-147243号公報
特開2017-159425号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1,2によれば、2つのモータユニットに各々コントローラが取り付けられている。このため、2つのモータユニットが大きくなり、ロボットの関節部分が張り出して腕が太くなってしまう。特に、近年人と共生するロボットが使用されており、腕を細くして外観的に違和感のないロボットの実用化が望まれている。
【0005】
そこで、本発明は、ロボットの腕を細くできるロボット用アクチュエータを提供する。
【課題を解決するための手段】
【0006】
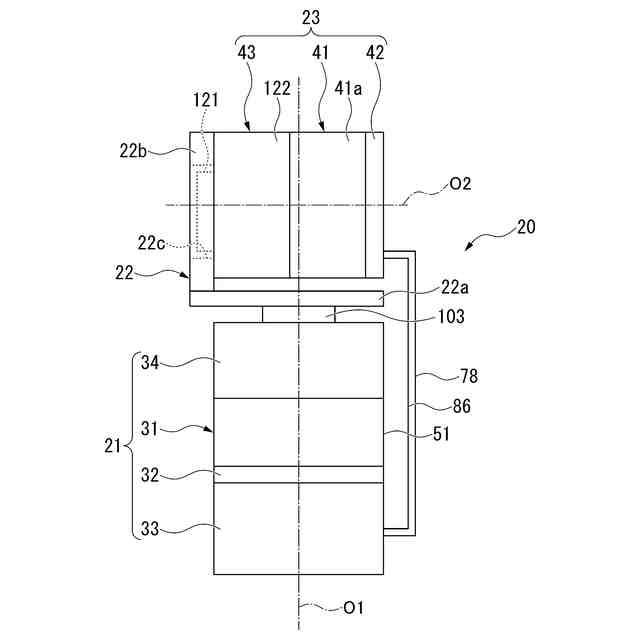
上記の課題を解決するために、本発明に係るロボット用アクチュエータは、第1モータが設けられた第1モータユニットと、前記第1モータユニットの第1出力軸に取り付けられたブラケットと、前記ブラケットに取り付けられ、前記第1出力軸に対して交差する第2出力軸が設けられた第2モータユニットと、前記第1モータユニットに設けられて、前記第1モータと前記第2モータユニットに設けられた第2モータとを制御する制御基板と、を備える。
【0007】
このように構成することで、2つのモータユニットをまとめることができる。そして、第1モータ及び第2モータ用の制御基板をまとめて第1モータユニットに設けるので、第2モータの駆動を制御する制御基板を第2モータユニットから除去できる。このため、ロボットの腕を細くできる。
【0008】
上記構成において、前記制御基板は、前記第1出力軸に沿って配置されていてもよい。
【0009】
このように構成することで、制御基板の形状やレイアウトの制約を緩めることができる。結果的にロボット用アクチュエータを小型化できる。
【0010】
上記構成において、前記第2モータにおいて前記第2出力軸の反対側に設けられた回転検出部と、前記制御基板に接続され、前記第1モータの外周面を経て前記第2モータの前記回転検出部側に接続されたケーブルと、を備え、前記第2モータユニットは、前記第1出力軸の中心から第2出力軸側の端面までの距離よりも、前記第1出力軸の中心から前記回転検出部側の端面までの距離が短くなるように、前記第1出力軸に対して交差するように配置されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ミツバ
払拭装置
22日前
株式会社ミツバ
モータ装置
7日前
株式会社ミツバ
ロボット用アクチュエータ
13日前
株式会社ミツバ
モータ装置およびその製造方法
7日前
株式会社ミツバ
モータ制御装置およびモータ制御方法
13日前
株式会社ミツバ
モータ制御装置およびモータ制御方法
13日前
個人
木製ハンマー
4か月前
個人
関節モジュール
3か月前
個人
寸切りボルト回し
3か月前
個人
スロットルトリガー
3か月前
株式会社エビス
連結具
7日前
中国電力株式会社
腰袋
7か月前
太陽工業株式会社
チャック装置
3か月前
コクヨ株式会社
補助器具
3か月前
日東工器株式会社
動力工具
4か月前
日東工器株式会社
動力工具
4か月前
日東工器株式会社
動力工具
4か月前
日東工器株式会社
衝撃工具
5か月前
日東工器株式会社
動力工具
4か月前
個人
メンテナンス用スタンド
5か月前
川崎重工業株式会社
ロボット
21日前
学校法人立命館
グリッパ
3か月前
オムロン株式会社
電動把持工具
3か月前
株式会社マキタ
電動工具
14日前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
14日前
川崎重工業株式会社
罫書用治具
6か月前
株式会社マキタ
動力工具
6か月前
東京計器株式会社
接触検知装置
4か月前
CKD株式会社
把持装置
3か月前
トヨタ自動車株式会社
ロボット
4か月前
白山工業株式会社
ロボットアーム
3か月前
株式会社ダイヘン
搬送装置
7か月前
株式会社ダイヘン
搬送装置
7か月前
個人
回転工具およびバリ取り部品
4か月前
株式会社マキタ
電動ハンマ
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ


































