TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024165647
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023082010
出願日
2023-05-18
発明の名称
把持装置、把持ロボット、及び把持方法
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
15/00 20060101AFI20241121BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】箱を横移動させることなく把持できる把持装置、把持ロボット、及び把持方法を提供する。
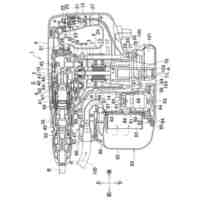
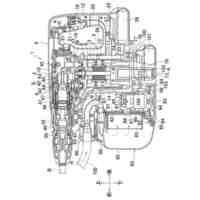
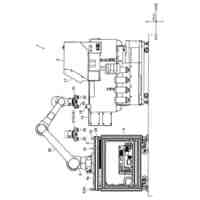
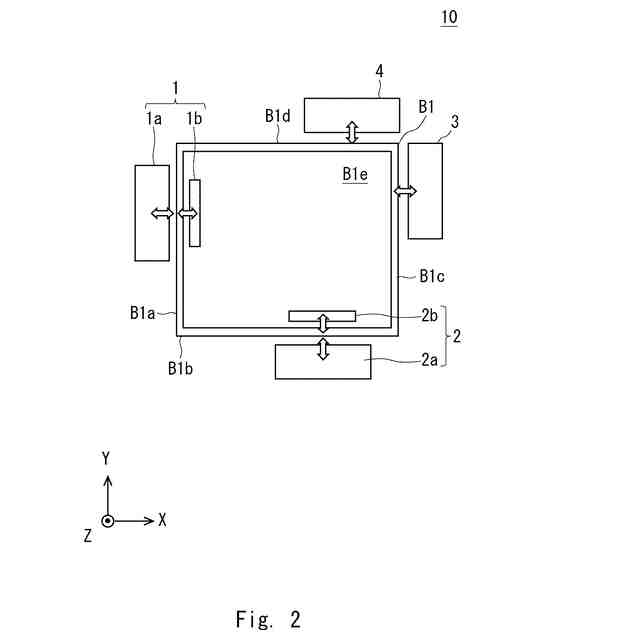
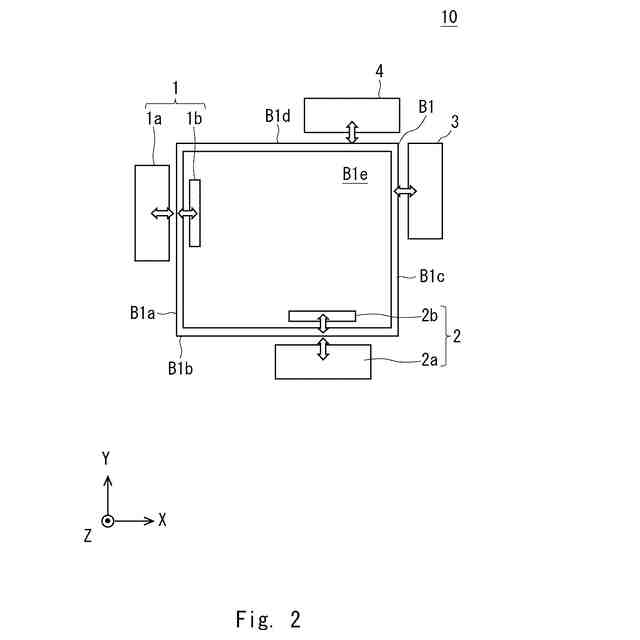
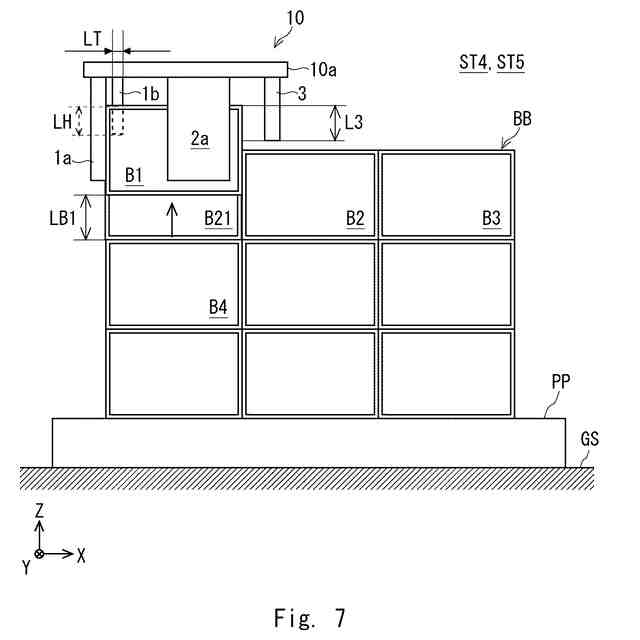
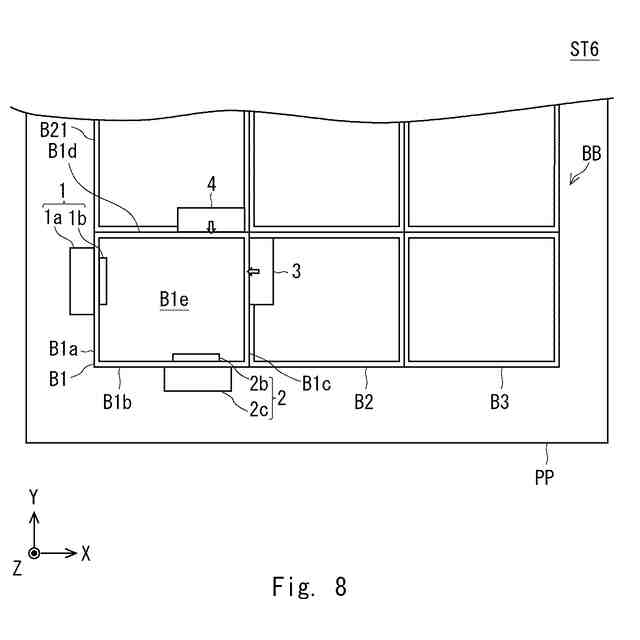
【解決手段】本開示に係る把持装置10は、箱B1を把持したまま移動可能である。箱B1において、第1の側壁B1a及び第2の側壁B1bは連結し、第1の側壁B1a及び第3の側壁B1cは対向し、第2の側壁B1b及び第4の側壁B1dは対向する。把持装置10は、第1の側壁B1aの内側壁面と外側壁面とを挟むことによって第1の側壁B1aを把持する第1の把持部と、第2の側壁B1bの内側壁面と外側壁面とを挟むことによって第2の側壁B1bを把持する第2の把持部と、第1の把持部が第1の側壁B1aを把持しつつ、第2の把持部が第2の側壁B1bを把持したまま、把持装置10が上方に移動した後、第3の側壁B1cの外側壁面に押し当たって、箱B1の把持を補助する第1の補助把持部とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
箱を把持したまま移動可能な把持装置において、
前記箱は、第1、第2、第3及び第4の側壁を備え、
前記第1、及び第2の側壁は、連結し、
前記第1、及び第3の側壁は、対向し、
前記第2、及び第4の側壁は、対向し、
前記第1の側壁の内側壁面と外側壁面とを挟むことによって前記第1の側壁を把持する第1の把持部と、
前記第2の側壁の内側壁面と外側壁面とを挟むことによって前記第2の側壁を把持する第2の把持部と、
前記第1の把持部が前記第1の側壁を把持しつつ、前記第2の把持部が前記第2の側壁を把持したまま、前記把持装置が上方に移動した後、前記第3の側壁の外側壁面に押し当たって、前記箱の把持を補助する第1の補助把持部と、を備える、
把持装置。
続きを表示(約 850 文字)
【請求項2】
前記第1の把持部が前記第1の側壁を把持しつつ、前記第2の把持部が前記第2の側壁を把持したまま、前記把持装置が上方に移動した後、前記第4の側壁の外側壁面に押し当たって、前記箱の把持を補助する第2の補助把持部と、を備える、
請求項1に記載の把持装置。
【請求項3】
前記第1の把持部は、外側爪と、内側爪とを備え、
前記第1の把持部は、前記外側爪を前記第1の側壁の外側壁面に押し当てつつ、前記内側爪を前記第1の側壁の内側壁面に押し当てることによって、前記第1の側壁の内側壁面と外側壁面とを挟むことによって前記第1の側壁を把持し、
前記内側爪と前記第1の側壁と接触した部分の高さ方向の長さは、積み重ね代以下である、
請求項1又は2に記載の把持装置。
【請求項4】
請求項1又は2に記載の把持装置を備えた把持ロボットであって、
前記把持装置が取り付けられたアームと、
前記アームを伸縮、又は屈曲させることによって、前記把持装置を移動させる制御部と、を備える、把持ロボット。
【請求項5】
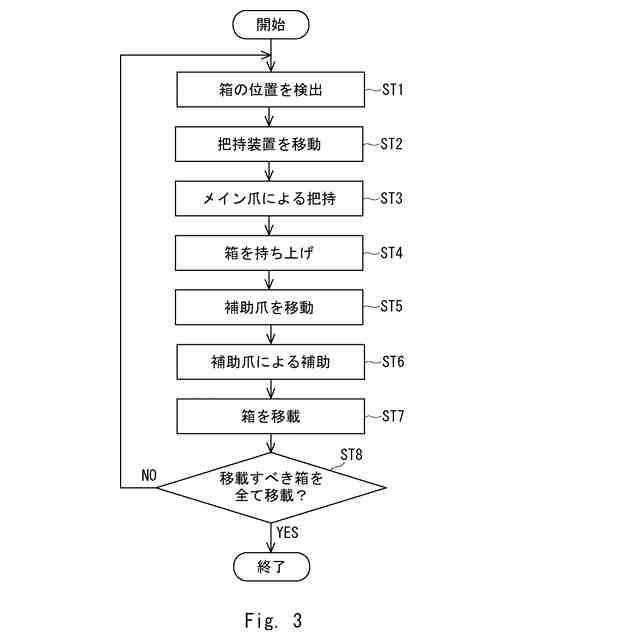
第1の補助把持部を備える把持ロボットの把持装置を用いて、箱を把持する把持方法であって、
前記箱は、第1、第2、第3及び第4の側壁を備え、
前記第1、及び第2の側壁は、連結し、
前記第1、及び第3の側壁は、対向し、
前記第2、及び第4の側壁は、対向し、
前記第1の側壁の内側壁面と外側壁面とを挟むことによって前記第1の側壁を把持するステップと、
前記第2の側壁の内側壁面と外側壁面とを挟むことによって前記第2の側壁を把持するステップと、
前記第1の側壁を把持しつつ、前記第2の側壁を把持したまま、前記箱を上方に移動させた後、前記第1の補助把持部を前記第3の側壁の外側壁面に押し当てて、前記箱の把持を補助するステップと、を備える、
把持方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は把持装置、把持ロボット、及び把持方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1に開示のピッキング装置は、コンテナを持ち上げる。詳細には、コンテナは、第1の側壁と、第2の側壁と、第1の縁と、第2の縁とを備える。第2の側壁は第1の側壁と対向する。第1の縁は、第1の側壁の上端部から外方へ延びる。第2の縁は、第2の側壁の上端部から外方へ延びる。より詳細には、特許文献1に開示のピッキング装置は、まず固定爪をコンテナの第1の縁に係合させ、この後持ち上げて横方向にある程度移動させる。その後、同装置は、移動爪を移動させ、コンテナの第2の縁に係合させてコンテナを持ち上げる。
【先行技術文献】
【特許文献】
【0003】
特開平5-319575号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本願発明者等は、以下の課題を発見した。
このようなピッキング装置は、対向する第1及び第2の側壁を把持して、コンテナを持ち上げる。そのため、当該コンテナの第1及び第2の側壁の一方が他のコンテナの側壁と密着している場合、当該コンテナを横移動させる必要がある。
【0005】
本開示は、上述した課題を鑑みてなされたものであり、箱を横移動させることなく把持できる把持装置、把持ロボット、及び把持方法を提供するものである。
【課題を解決するための手段】
【0006】
本開示に係る把持装置は、
箱を把持したまま移動可能な把持装置において、
前記箱は、第1、第2、第3及び第4の側壁を備え、
前記第1、及び第2の側壁は、連結し、
前記第1、及び第3の側壁は、対向し、
前記第2、及び第4の側壁は、対向し、
前記第1の側壁の内側壁面と外側壁面とを挟むことによって前記第1の側壁を把持する第1の把持部(例えば、第1のメイン爪1等)と、
前記第2の側壁の内側壁面と外側壁面とを挟むことによって前記第2の側壁を把持する第2の把持部(例えば、第2のメイン爪2等)と、
前記第1の把持部が前記第1の側壁を把持しつつ、前記第2の把持部が前記第2の側壁を把持したまま、前記把持装置が上方に移動した後、前記第3の側壁の外側壁面に押し当たって、前記箱の把持を補助する第1の補助把持部(例えば、第1の補助爪3等)と、を備える。
【0007】
また、上述した把持装置において、前記第1の把持部が前記第1の側壁を把持しつつ、前記第2の把持部が前記第2の側壁を把持したまま、前記把持装置が上方に移動した後、前記第4の側壁の外側壁面に押し当たって、前記箱の把持を補助する第2の補助把持部(例えば、第2の補助爪4等)と、を備えてもよい。
【0008】
また、上述した把持装置において、前記第1の把持部は、外側爪と、内側爪とを備え、
前記第1の把持部は、前記外側爪を前記第1の側壁の外側壁面に押し当てつつ、前記内側爪を前記第1の側壁の内側壁面に押し当てることによって、前記第1の側壁の内側壁面と外側壁面とを挟むことによって前記第1の側壁を把持し、
前記内側爪と前記第1の側壁と接触した部分の高さ方向の長さは、積み重ね代以下であるとよい。
【0009】
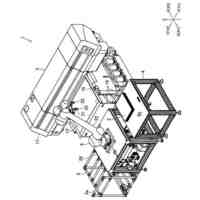
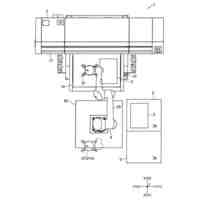
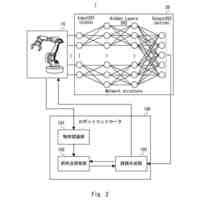
本開示に係る把持ロボットは、
上述した把持装置を備えた把持ロボットであって、
前記把持装置が取り付けられたアームと、
前記アームを伸縮、又は屈曲させることによって、前記把持装置を移動させる制御部と、を備える。
【0010】
本開示に係る把持方法は、
第1の補助把持部を備える把持ロボットの把持装置を用いて、箱を把持する把持方法であって、
前記箱は、第1、第2、第3及び第4の側壁を備え、
前記第1、及び第2の側壁は、連結し、
前記第1、及び第3の側壁は、対向し、
前記第2、及び第4の側壁は、対向し、
前記第1の側壁の内側壁面と外側壁面とを挟むことによって前記第1の側壁を把持するステップと、
前記第2の側壁の内側壁面と外側壁面とを挟むことによって前記第2の側壁を把持するステップと、
前記第1の側壁を把持しつつ、前記第2の側壁を把持したまま、前記箱を上方に移動させた後、前記第1の補助把持部を前記第3の側壁の外側壁面に押し当てて、前記箱の把持を補助するステップと、を備える。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
12日前
株式会社マキタ
電動工具
5日前
株式会社マキタ
電動工具
20日前
川崎重工業株式会社
ロボット
2か月前
日本車輌製造株式会社
締め付け工具
20日前
川崎重工業株式会社
ロボットアーム
20日前
川崎重工業株式会社
ロボットアーム
20日前
川崎重工業株式会社
ロボットリスト
20日前
川崎重工業株式会社
ロボットシステム
20日前
CKD株式会社
吸着型搬送装置
1か月前
日本信号株式会社
作業機制御システム
5日前
ジヤトコ株式会社
圧入装置
1か月前
株式会社安川電機
ロボット
1か月前
長堀工業株式会社
締結装置
1か月前
株式会社京阪エンジニアリング
脱着装置
6日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社マキタ
集塵アタッチメント
5日前
株式会社スター精機
ワーク搬送装置
9日前
株式会社アマダ
磁気吸着装置
1か月前
モトコマ株式会社
寄せポンチホルダー
21日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
12日前
トヨタ自動車株式会社
制御装置及び制御方法
20日前
有限会社松尾エンジニアリング
連結部材
21日前
個人
ターンバックル用工具
27日前
株式会社マキタ
電動工具用集塵システム
2か月前
株式会社マキタ
電動工具用集塵システム
2か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社DailyColor
ロボットハンド
21日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社SHIN‐JIGEN
上肢アシスト装置
26日前
トヨタ自動車株式会社
経路決定システム及び方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ