TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024164946
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023080693
出願日
2023-05-16
発明の名称
ロボット制御システム、ロボット制御方法、および、ロボット制御装置
出願人
株式会社日立製作所
代理人
ポレール弁理士法人
主分類
B25J
5/00 20060101AFI20241121BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 目標動作を達成するための腕部状態と移動部状態の組合せが多い場合でも、適切な移動部制御則を容易に取得できるロボット制御システムを提供する。
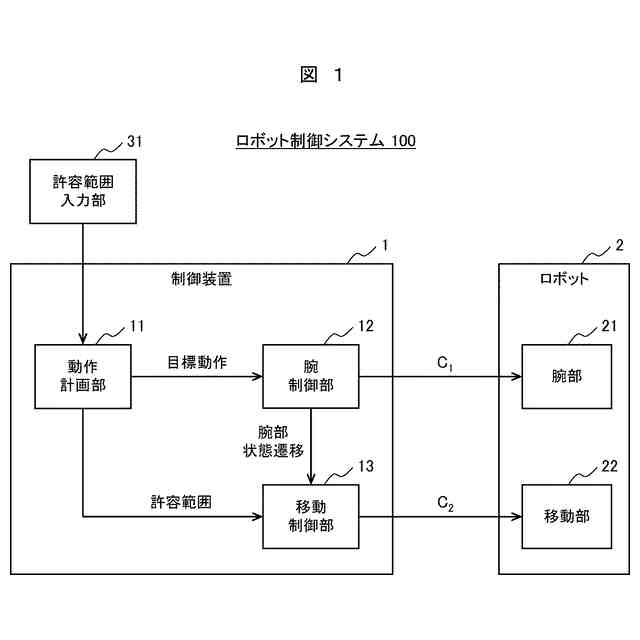
【解決手段】 腕部と移動部を有するロボットと、前記ロボットを制御する制御装置と、を有するロボット制御システムであって、前記制御装置は、前記腕部の動作に関する目標動作および前記目標動作に応じた前記移動部の動作の許容範囲を出力する動作計画部と、前記目標動作に関する腕制御指令および腕部状態遷移を出力する腕制御部と、前記腕部状態遷移を用い、前記許容範囲に収まるように前記移動部の動作に関する移動制御指令を生成する移動制御部と、を備え、前記ロボットは、前記腕部が前記腕制御指令により制御され、前記移動部が前記移動制御指令により制御されることを特徴とするロボット制御システム。
【選択図】 図1
特許請求の範囲
【請求項1】
腕部と移動部を有するロボットと、
前記ロボットを制御する制御装置と、
を有するロボット制御システムであって、
前記制御装置は、
前記腕部の動作に関する目標動作および前記目標動作に応じた前記移動部の動作の許容範囲を出力する動作計画部と、
前記目標動作に関する腕制御指令および腕部状態遷移を出力する腕制御部と、
前記腕部状態遷移を用い、前記許容範囲に収まるように前記移動部の動作に関する移動制御指令を生成する移動制御部と、
を備え、
前記ロボットは、前記腕部が前記腕制御指令により制御され、前記移動部が前記移動制御指令により制御されることを特徴とするロボット制御システム。
続きを表示(約 1,000 文字)
【請求項2】
前記動作計画部は、前記許容範囲に前記移動部の動作の目標軌道を生成し、
前記移動制御部は、前記目標軌道との誤差が小さくなるように前記移動制御指令を生成することを特徴とする、請求項1に記載のロボット制御システム。
【請求項3】
前記ロボットの前記移動部は、脚部または回転翼を有し、
前記移動制御部は、前記脚部の関節または前記回転翼の状態に関する前記移動制御指令を生成することを特徴とする、請求項1に記載のロボット制御システム。
【請求項4】
前記腕制御部は、前記腕制御指令の状態遷移を用いて将来の腕制御指令を予測することにより前記腕部状態遷移を生成することを特徴とする、請求項1に記載のロボット制御システム。
【請求項5】
前記許容範囲は、前記移動部または前記腕部のエンドエフェクタの状態に対する下限と上限の少なくとも一方を設定することで生成されることを特徴とする、請求項1に記載のロボット制御システム。
【請求項6】
前記移動部または前記エンドエフェクタの状態は、位置、回転、並進速度、回転速度、並進加速度、回転加速度、並進加加速度、回転加加速度のいずれかであることを特徴とする、請求項5に記載のロボット制御システム。
【請求項7】
前記移動制御部は、前記許容範囲の中で前記移動部または前記エンドエフェクタの状態が変動する大きさを調整する重み行列に基づいて前記移動制御指令を生成することを特徴とする、請求項5に記載のロボット制御システム。
【請求項8】
前記許容範囲に関する情報を入力する許容範囲入力部と、
前記許容範囲を用いて前記ロボットが制御された結果を基に表示情報を演算する演算部と、
前記表示情報を表示する表示部と、
を備えることを特徴とする、請求項1に記載のロボット制御システム。
【請求項9】
前記表示情報は、
前記許容範囲、前記移動部又は腕部の状態、前記ロボットが消費した電力、前記腕部の前記目標動作の完了時間の予測のいずれかを含むことを特徴とする、請求項8に記載のロボット制御システム。
【請求項10】
前記許容範囲に関する情報には、許容範囲を設定する移動部または前記腕部のエンドエフェクタの状態、許容範囲の上限、許容範囲の下限のいずれかが含まれることを特徴とする、請求項8に記載のロボット制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット制御システム、ロボット制御方法、および、ロボット制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、少子高齢化に伴う労働力不足や、災害区域での危険作業などが社会課題となっている。それらの解決へ向け、ロボットが安全かつ効率的に作業できるように整備された工場等の環境以外(以下、「非整備環境」と呼ぶ)においても、様々な作業へのロボットの活用が期待されている。
【0003】
災害区域等の非整備環境下で、腕部と移動部を有するロボットが自律的に作業を遂行するには、操作対象物を巧みに操作する腕制御に加え、操作対象物の近傍まで適切に移動する移動制御が要求される。それらを実現したロボットとしては、例えば、マニピュレータを装備した、2輪駆動台車、クローラ型ロボット、四脚型ロボット、人型ロボット(ヒューマノイド)、無人航空機(UAV)などが挙げられる。
【0004】
この種のロボットの一例としては、非特許文献1の移動型マニピュレータが知られている。非特許文献1では、移動型マニピュレータ(Legged Mobile Manipulator)の腕制御器(arm controller)と移動制御器(base controller)を別途用意し、腕の挙動に基づく移動部の制御則(制御指令)を深層強化学習(Deep reinforcement learning)により取得するロボット制御方法を提案している。
【先行技術文献】
【非特許文献】
【0005】
Y. Ma, F. Farshidian, T. Miki, J. Lee and M. Hutter, "Combining Learning-based Locomotion Policy with Model-based Manipulation for Legged Mobile Manipulators," arXiv:2201.03871v1, 2022.
【発明の概要】
【発明が解決しようとする課題】
【0006】
非整備環境でロボットが行う目標動作は多様であり、例えば、操作対象物の把持・運搬・設置、扉の開閉、レバー操作などの操作対象物の位置又は姿勢を変化させる動作や、溶接・塗装・切断・組立などの操作対象物を加工する動作などがある。
【0007】
非特許文献1では、腕制御器と移動制御器が独立しているため、腕部に新たな目標動作を実行させる場合には、腕制御器の制御則を変更するだけで対応することができた。また、腕部の制御測の変更には、既に確立されている腕部の動作生成技術を活用できるため、比較的簡単に新たな目標動作を実装することができた。
【0008】
しかしながら、非特許文献1の移動部の制御方法には、移動部の制御則を学習する際に考慮した条件下でしか、移動部を安定して制御できないという問題があった。したがって、目標動作を実行する際の腕部状態と移動部状態の組合せが多い場合には、移動部の適切な制御則を取得することが困難となる。例えば、腕部の到達範囲を広げるために移動部の姿勢を変化させるような制御を実行する場合には、腕部が動作したときの慣性力の影響を含めると、考慮しなければならない状態の組合せは膨大となるため、移動部の適切な制御則を取得することが困難であった。
【0009】
そこで、本発明は、目標動作を達成するための腕部状態と移動部状態の組合せが多い場合でも、適切な移動部制御則を容易に取得できるロボット制御システム、ロボット制御方法、および、ロボット制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決するため、本発明のロボット制御システムは、腕部と移動部を有するロボットと、前記ロボットを制御する制御装置と、を有するロボット制御システムであって、前記制御装置は、前記腕部の動作に関する目標動作および前記目標動作に応じた前記移動部の動作の許容範囲を出力する動作計画部と、前記目標動作に関する腕制御指令および腕部状態遷移を出力する腕制御部と、前記腕部状態遷移を用い、前記許容範囲に収まるように前記移動部の動作に関する移動制御指令を生成する移動制御部と、を備え、前記ロボットは、前記腕部が前記腕制御指令により制御され、前記移動部が前記移動制御指令により制御されるロボット制御システムとした。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
3か月前
個人
関節モジュール
3か月前
個人
寸切りボルト回し
3か月前
個人
スロットルトリガー
3か月前
中国電力株式会社
腰袋
6か月前
コクヨ株式会社
補助器具
2か月前
太陽工業株式会社
チャック装置
2か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
衝撃工具
5か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
川崎重工業株式会社
ロボット
7日前
個人
メンテナンス用スタンド
4か月前
学校法人立命館
グリッパ
3か月前
川崎重工業株式会社
罫書用治具
5か月前
東京計器株式会社
接触検知装置
4か月前
株式会社マキタ
動力工具
6か月前
トヨタ自動車株式会社
ロボット
4か月前
株式会社マキタ
打撃工具
27日前
オムロン株式会社
電動把持工具
2か月前
CKD株式会社
把持装置
3か月前
株式会社ダイヘン
制御装置
1か月前
株式会社マキタ
電動ハンマ
1か月前
トヨタ自動車株式会社
ハンド構造
5か月前
株式会社ダイヘン
搬送装置
6か月前
株式会社ダイヘン
搬送装置
6か月前
個人
回転工具およびバリ取り部品
4か月前
株式会社エビス
携帯付属物取付具
27日前
株式会社ハーモ
開閉チャック装置
4か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社ダイヘン
搬送装置
27日前
白山工業株式会社
ロボットアーム
3か月前
個人
容器引っ掛け棒およびその使用方法
4か月前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボット
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































