TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024164928
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023080661
出願日
2023-05-16
発明の名称
容器整列装置
出願人
澁谷工業株式会社
代理人
個人
,
個人
主分類
B65G
47/91 20060101AFI20241121BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
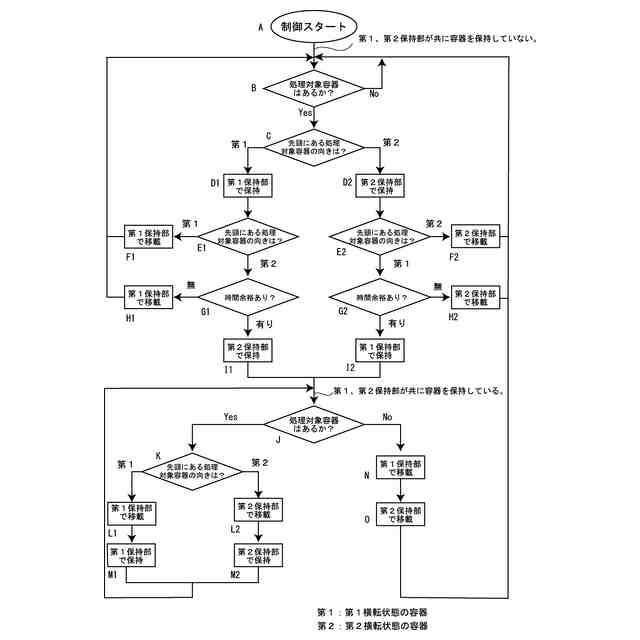
【課題】供給コンベヤ3で容器2が連続して供給されない場合であっても、排出コンベヤ4で空きの無いように移載する。
【解決手段】 横転状態の容器2を搬送する供給コンベヤ3と、正立状態の容器2を搬送する排出コンベヤ4と、横転状態の容器2を供給コンベヤ3から排出コンベヤ4に移載するロボット6とを備える。
上記供給コンベヤ3によって搬送される容器2が上記ロボット6によって保持可能な保持領域Fに位置しているか否かを判定する搬送状態検出手段5を備え、上記ロボット6は複数の保持部31A、31Bを備えている。
複数の保持部が容器2を保持し、かつ上記搬送状態検出手段5が上記保持領域F内に容器2が位置していないと判定した場合には、上記複数の保持部が保持している容器2をそれぞれ上記排出コンベヤ4に移載させる第2移載処理(J~O)を実行する。
【選択図】 図7
特許請求の範囲
【請求項1】
口部が側方を向いた横転状態で容器を搬送する供給コンベヤと、口部が上方を向いた正立状態の容器を搬送する排出コンベヤと、保持部によって上記供給コンベヤ上に設定された保持領域内に位置する横転状態の容器を保持して、上記排出コンベヤにおいて容器を解放して当該排出コンベヤ上に移載する移載処理を実行するロボットと、上記ロボットを制御する制御手段とを備えた容器整列装置において、
上記供給コンベヤ上の容器搬送状態を検出する搬送状態検出手段を備え、
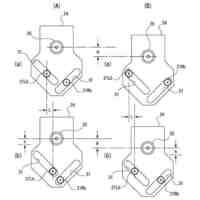
上記ロボットは、上記横転状態の容器を保持する少なくとも第1保持部および第2保持部を備え、
上記制御手段は、
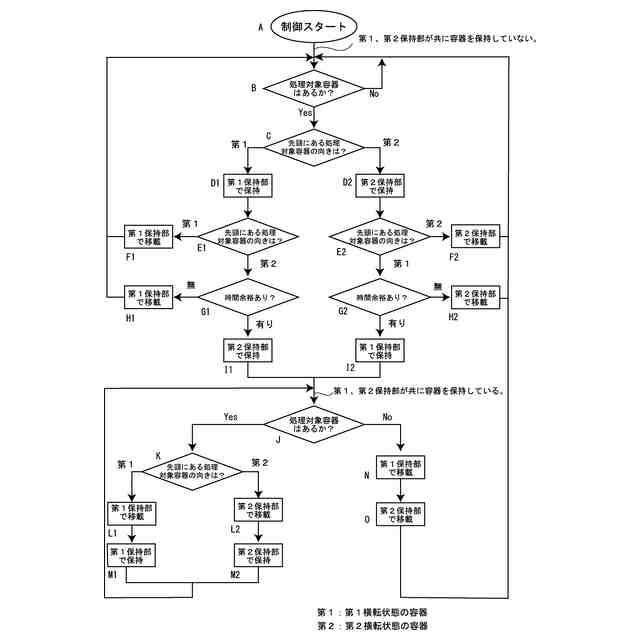
上記第1保持部および第2保持部が共に容器を保持した状態で、上記搬送状態検出手段の検出結果に基づき、上記保持領域内に移載処理を実行可能な処理対象容器が存在すると判定した場合には、上記ロボットを制御して、第1保持部または第2保持部のいずれか一方が保持した容器を上記排出コンベヤに移載させ、その後、いずれか他方の保持部が容器を保持したまま、上記容器を移載した一方の保持部によって上記処理対象容器を保持させる第1移載処理を実行し、
上記第1保持部および第2保持部が共に容器を保持した状態で、上記搬送状態検出手段の検出結果に基づき、上記保持領域内に上記処理対象容器が存在しないと判定した場合には、上記ロボットを制御して、上記第1保持部および第2保持部が保持した容器をそれぞれ上記排出コンベヤに移載させ、その後、上記保持領域内に上記処理対象容器が新たに存在すると判定した場合に、当該上記第1保持部または第2保持部のいずれか一方によって、上記処理対象容器を保持させる第2移載処理を実行することを特徴とする容器整列装置。
続きを表示(約 490 文字)
【請求項2】
上記供給コンベヤは、口部が一方の側方を向いた第1横転状態の容器、または口部が他方の側方を向いた第2横転状態の容器を搬送し、
上記ロボットの上記第1保持部は上記第1横転状態の容器を保持するとともに、上記第2保持部は上記第2横転状態の容器を保持し、
さらに上記搬送状態検出手段によって、上記処理対象容器容器が第1または第2横転状態のいずれであるかを検出可能であり、
上記制御手段は、
上記処理対象容器が第1横転状態であることを検出した場合に上記第1移載処理を実行する際には、
上記第1保持部が保持する容器を上記排出コンベヤに移載させ、その後上記第1保持部によって上記供給コンベヤから上記第1横転状態の処理対象容器を保持させ、
上記処理対象容器が第2横転状態であることを検出した場合に上記第1移載処理を実行する際には、
上記第2保持部が保持する容器を上記排出コンベヤに移載させ、その後、上記第2保持部によって上記供給コンベヤから上記第2横転状態の処理対象容器を保持させることを特徴とする請求項1に記載の容器整列装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は容器整列装置に関し、詳しくは横転状態の容器をロボットで保持し、当該容器を排出コンベヤにおいて正立状態となるように移載する容器整列装置に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
従来、供給コンベヤから横転状態の容器をロボットによって取出し、当該容器を排出コンベヤにおいて正立状態となるように移載する容器整列装置が知られている(特許文献1)。
特許文献1の容器整列装置は、上記供給コンベヤによって搬送される容器の向きを検出する向き検出手段を備え、上記ロボットは上記向き検出手段の検出結果に基づいて供給コンベヤから容器を保持し、その後上記容器が正立状態となるように排出コンベヤで容器を移載するようになっている。
また上記特許文献1のロボットは、容器を保持する保持部を2つ備えており、この2つの保持部が供給コンベヤにおいて2つの容器を保持すると、その後、排出コンベヤにおいて2つの保持部が2つの容器を移載する動作を行うようになっており、また上記保持部は供給コンベヤを搬送される横転状態の容器の向きに応じて揺動可能に設けられている。
【先行技術文献】
【特許文献】
【0003】
特開2021-098566号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、このような容器整列装置において、上記供給コンベヤへの容器の供給が滞ってしまうと、容器の搬送されない状態が連続して発生してしまうこととなる。
その場合、ロボットは供給コンベヤの容器を排出コンベヤへと移載する動作ができなくなってしまい、結果として排出コンベヤにおいても空きを発生させてしまうこととなる。
このような排出コンベヤにおける空きは、容器整列装置の下流側に設けられたフィラやキャッパといった、容器への内容物充填システムにも悪影響を及ぼし、システム全体の処理能力が低下することなる。
このような問題に鑑み、本発明は供給コンベヤにおいて容器が連続して搬送されないような場合であっても、排出コンベヤで空きの無いように移載することが可能な容器整列装置を提供するものである。
【課題を解決するための手段】
【0005】
すなわち請求項1の発明にかかる容器整列装置は、口部が側方を向いた横転状態で容器を搬送する供給コンベヤと、口部が上方を向いた正立状態の容器を搬送する排出コンベヤと、保持部によって上記供給コンベヤ上に設定された保持領域内に位置する横転状態の容器を保持して、上記排出コンベヤにおいて容器を解放して当該排出コンベヤ上に移載する移載処理を実行するロボットと、上記ロボットを制御する制御手段とを備えた容器整列装置において、
上記供給コンベヤ上の容器搬送状態を検出する搬送状態検出手段を備え、
上記ロボットは、上記横転状態の容器を保持する少なくとも第1保持部および第2保持部を備え、
上記制御手段は、
上記第1保持部および第2保持部が共に容器を保持した状態で、上記搬送状態検出手段の検出結果に基づき、上記保持領域内に移載処理を実行可能な処理対象容器が存在すると判定した場合には、上記ロボットを制御して、第1保持部または第2保持部のいずれか一方が保持した容器を上記排出コンベヤに移載させ、その後、いずれか他方の保持部が容器を保持したまま、上記容器を移載した一方の保持部によって上記処理対象容器を保持させる第1移載処理を実行し、
上記第1保持部および第2保持部が共に容器を保持した状態で、上記搬送状態検出手段の検出結果に基づき、上記保持領域内に上記処理対象容器が存在しないと判定した場合には、上記ロボットを制御して、上記第1保持部および第2保持部が保持した容器をそれぞれ上記排出コンベヤに移載させ、その後、上記保持領域内に上記処理対象容器が新たに存在すると判定した場合に、当該上記第1保持部または第2保持部のいずれか一方によって、上記処理対象容器を保持させる第2移載処理を実行することを特徴としている。
【発明の効果】
【0006】
上記発明によれば、上記第1、第2保持部がそれぞれ容器を保持し、かつ供給コンベヤの保持領域内に処理対象容器が位置している場合には、一方の保持部だけを用いて容器を排出コンベヤに移載する第1移載処理を行うようになっている。
この第1移載処理では、例えば第1保持部によって移載を行う場合、第2保持部は容器をバッファとして保持し続けるため、その後供給コンベヤに設定した保持領域内に処理対象容器が位置しなくなった場合には、第2移載処理として第2保持部が保持している容器を排出コンベヤに移載することができる。
これにより、供給コンベヤの保持領域に処理対象容器が位置するまでの時間を稼ぐことが可能となり、排出コンベヤでの空きを可及的に発生しないようにすることができる。
【図面の簡単な説明】
【0007】
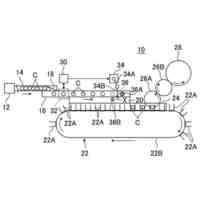
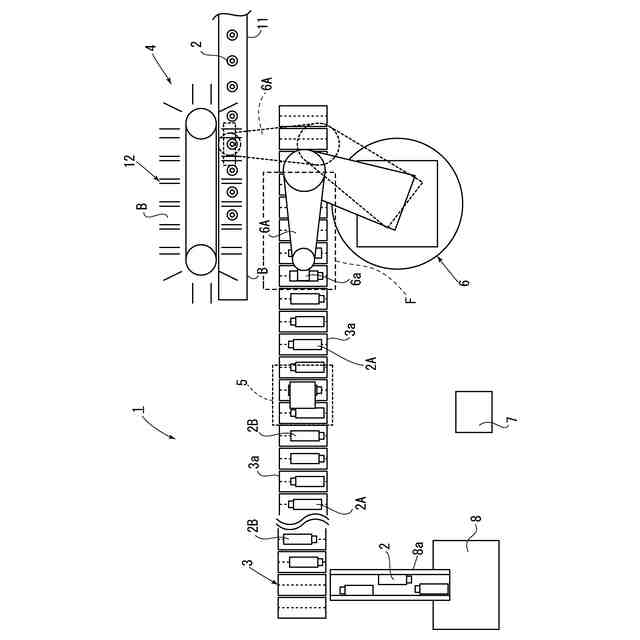
本実施形態にかかる容器整列装置の平面図
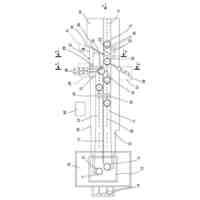
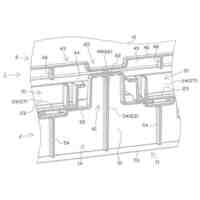
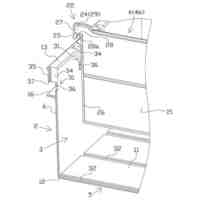
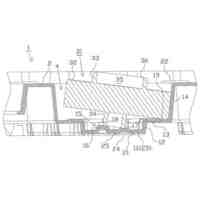
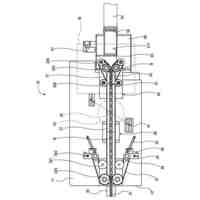
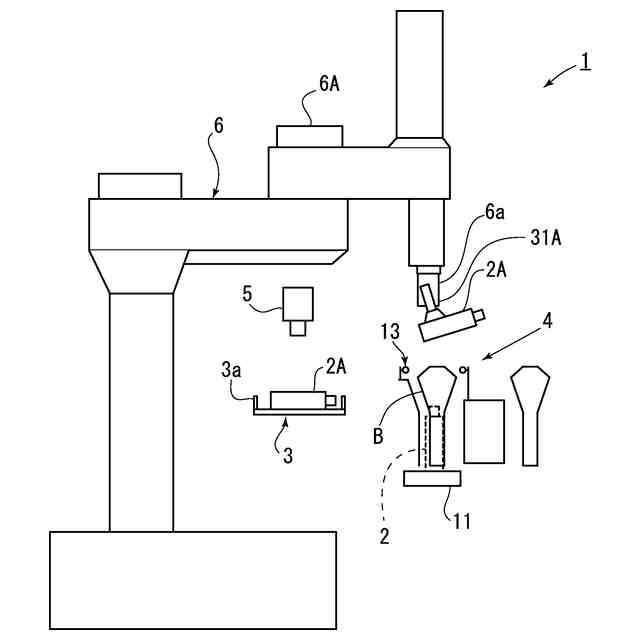
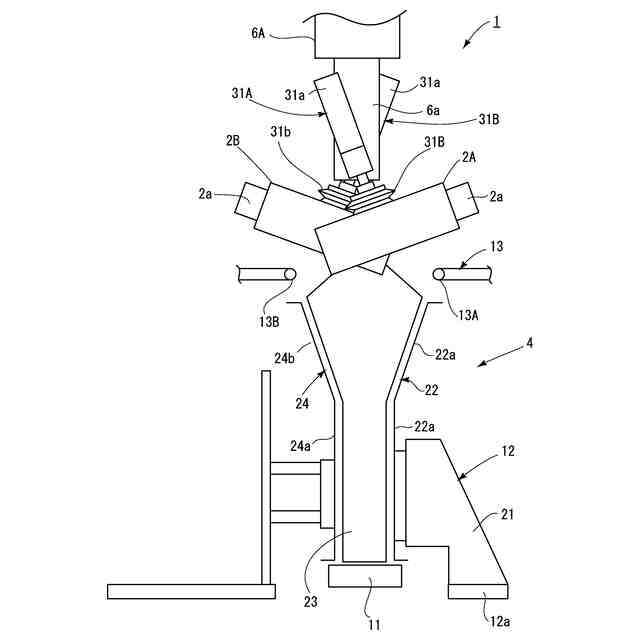
図1の要部の側面図
図2の要部の拡大図
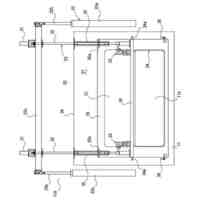
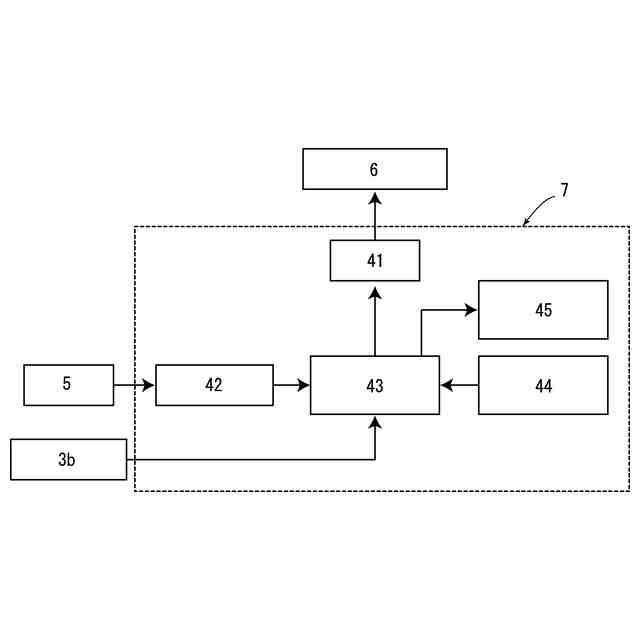
制御装置の構成図
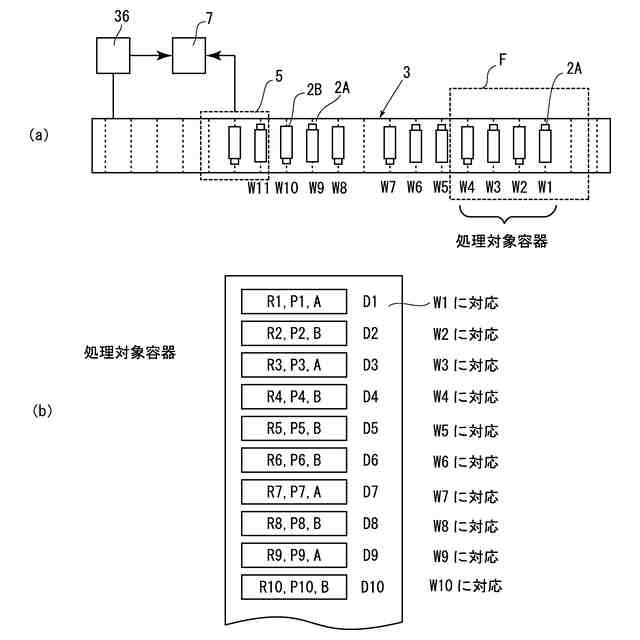
供給コンベヤの保持領域およびデータ記憶部のデータを説明する図
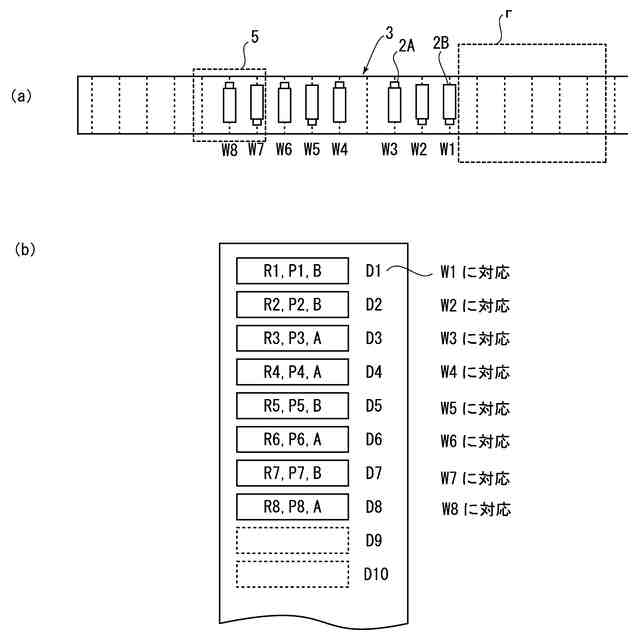
供給コンベヤの保持領域およびデータ記憶部のデータを説明する図
容器整列装置の動作を説明するフローチャート
【発明を実施するための形態】
【0008】
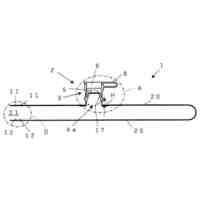
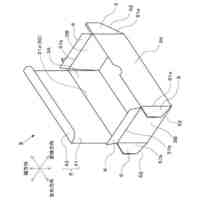
以下図示実施形態について説明すると、図1は容器整列装置1の平面図を示し、横転状態の容器2を搬送する供給コンベヤ3と、正立状態の容器2を搬送する排出コンベヤ4と、上記供給コンベヤ3が搬送する容器2の状態を検出する搬送状態検出手段5と、供給コンベヤ3と排出コンベヤ4との間で容器2を移載するロボット6と、上記ロボット6を制御する制御装置7とを備えている。
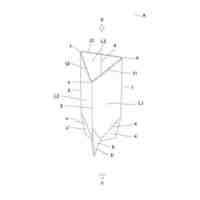
上記容器2は円筒状を有したプラスチック容器となっており、上端には口部2aが設けられている。本実施形態において、上記容器2は口部2aが側方を向いた横転状態で上記供給コンベヤ3に供給され、上記ロボット6が当該容器2を上記排出コンベヤ4に移載すると、口部2aが上方を向いた正立状態とされるようになっている。
【0009】
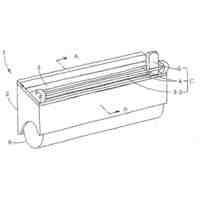
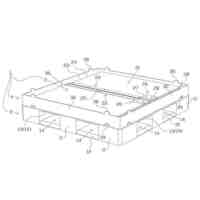
上記供給コンベヤ3は、サーボモータやステッピングモータ等の図示しない駆動手段によって駆動される図示しないベルトコンベヤと、当該ベルトコンベヤに沿って等間隔に設けられた収容部3aとから構成され、各収容部3aには上記横転状態の容器2が一つずつ収容されるようになっている。
上記収容部3aは断面略V字形を有しており、当該収容部3aの谷底部(図示破線で示す)は上記ベルトコンベヤの搬送方向に対して直交する向きに設けられている。
これにより、上記収容部3aに横転状態の容器2が収容されると、当該容器2の長手方向(軸心)が供給コンベヤ3の搬送方向と直交するようになっている。
【0010】
上記供給コンベヤ3の上流側には、多数の容器2を収容したホッパ8が設けられており、当該ホッパ8と供給コンベヤ3との間には傾斜フィーダ8aが設けられている。
上記ホッパ8は上記容器2を横転状態で傾斜フィーダ8a上に排出し、また容器2の長手方向を上記供給コンベヤ3の搬送方向に対して直交させた状態で排出するようになっている。
これにより、供給コンベヤ3に供給された容器2は、図1において口部2aを図示上方に向けた第1横転状態か、口部2aを図示下方に向けた第2横転状態で搬送され、また供給コンベヤ3は、上記第1横転状態の容器2Aまたは第2横転状態の容器2Bをランダムな順番で搬送するようになっている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
澁谷工業株式会社
洗浄装置
1か月前
澁谷工業株式会社
物品集合装置
3日前
澁谷工業株式会社
物品搬送装置
3日前
澁谷工業株式会社
容器整列装置
3日前
澁谷工業株式会社
シャッタ装置
10日前
澁谷工業株式会社
物品処理システム
10日前
澁谷工業株式会社
容器殺菌装置および容器殺菌方法
23日前
個人
箱
1か月前
個人
包装体
2か月前
個人
ゴミ箱
1か月前
個人
収納用具
5か月前
個人
物品収納具
5か月前
個人
パウチ補助具
1か月前
個人
折り畳み水槽
2か月前
個人
ダンボール宝箱
2か月前
個人
掃除楽々ゴミ箱
6か月前
個人
開封用カッター
7か月前
個人
折りたたみコップ
8か月前
個人
チャック付き袋体
8か月前
個人
圧縮収納袋
2か月前
三甲株式会社
容器
4か月前
個人
チャック付き保存袋
7か月前
個人
粘着テープ剥がし具
6か月前
株式会社イシダ
箱詰装置
4か月前
個人
粘着テープ切断装置
4か月前
個人
塗料容器用蓋
1か月前
株式会社新弘
容器
1か月前
積水樹脂株式会社
接着剤
6か月前
三甲株式会社
容器
4か月前
株式会社新弘
容器
1か月前
株式会社イシダ
包装装置
1か月前
積水樹脂株式会社
接着剤
1か月前
個人
粘着テープ剥がし具
3か月前
株式会社joze
攪拌容器
5か月前
三甲株式会社
トレー
6か月前
日東精工株式会社
検査装置
5か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ