TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024162830
公報種別
公開特許公報(A)
公開日
2024-11-21
出願番号
2023078750
出願日
2023-05-11
発明の名称
物品処理システム
出願人
澁谷工業株式会社
代理人
個人
,
個人
主分類
B65G
47/90 20060101AFI20241114BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】物品検出にエラーが発生した場合にも、ロボットが保持する物品が他の物品と衝突することを回避できる物品処理システムを提供する。
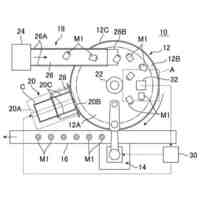
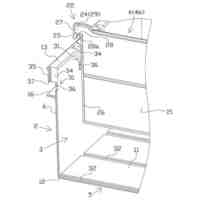
【解決手段】物品処理システム10は、供給コンベヤ16から下流側に並設されるバケットコンベヤ22へと容器Cを移載するロボット34を備える。ロボット34は制御装置30により制御され、カメラ32と供給コンベヤ16のエンコーダ信号から算出される供給コンベヤ16上の容器Cの位置に基づき検知された隣合う容器Cをロボット34の第1、第2物品保持部36A、36Bで保持し、バケットコンベヤ22へと移載する。第1物品保持部36Aによる第1取り上げ動作の後、第2物品保持部36Bによる第2取り上げ動作を実行する際、第2物品保持部36Bを供給コンベヤ16の上方に配置し、かつ、第1物品保持部36Aに保持される容器Cを供給コンベヤ16とバケットコンベヤ22の間に配置する。
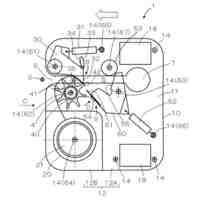
【選択図】図1
特許請求の範囲
【請求項1】
一列に整列された状態の物品を搬送する第1搬送手段と、
上記第1搬送手段の下流に設けられ、物品を搬送する第2搬送手段と、
上記第1搬送手段によって搬送される物品の位置を検出する位置検出手段と、
上記物品を保持する物品保持部を有するロボットと、
上記位置検出手段の検出結果に基づいて、上記ロボットを制御して、上記第1搬送手段上の物品を取り上げ、その取り上げた物品を上記第2搬送手段に移載する制御装置と、を備えた物品処理システムにおいて、
上記ロボットは、第1および第2物品保持部を有しており、
上記制御手段は、
上記第1物品保持部によって上記第1搬送手段上の物品を取り上げるための第1取り上げ動作を実行した後、上記第2物品保持部によって上記第1搬送手段上の物品を取り上げるための第2取り上げ動作を実行するものであり、
上記第2取り上げ動作は、上記第2物品保持部が上記第1搬送手段の上方に位置し、かつ、上記第1物品保持部によって保持された物品が上記第1搬送手段と第2搬送手段との間に位置する状態で実行する
ことを特徴とする物品処理システム。
続きを表示(約 210 文字)
【請求項2】
上記第1および第2搬送手段は互いの搬送方向が略平行に配置されており、
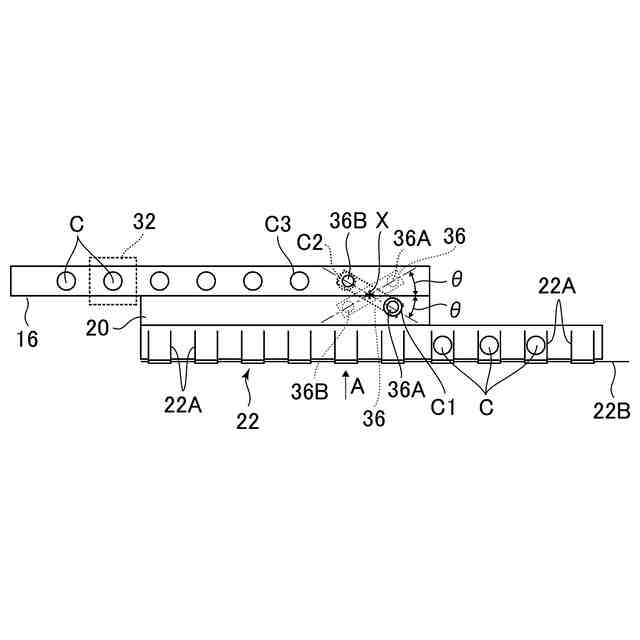
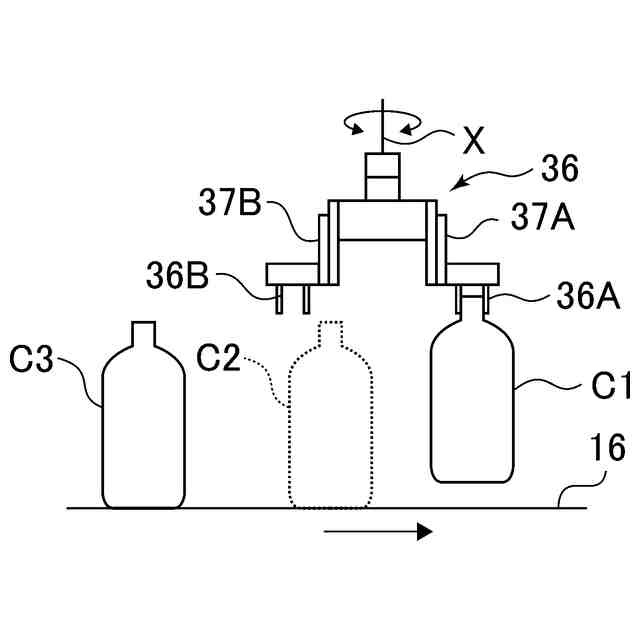
上記ロボットのアーム先端に設けられたベース部材の両端に上記第1および第2物品保持部がそれぞれ取り付けられており、上記第2取り上げ動作は、上記第1および第2物品保持部を結ぶ直線が、上記第1搬送手段の搬送方向と平面視において所定角度で交差する状態で行われる
ことを特徴とする請求項1に記載の物品処理システム。
発明の詳細な説明
【技術分野】
【0001】
並走するコンベヤ間において物品を移載する物品処理システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
第1コンベヤの下流部に第2コンベヤの上流部を並走させた搬送システムにおいて、1列で搬送される容器を第1コンベヤから第2コンベヤ上のバケットにロボットを用いて移載する物品処理システムが知られている(特許文献1参照)。同物品処理システムでは、第1コンベヤによって搬送される物品の位置に基づいてロボットを制御して、第1コンベヤ上の容器を取り上げ、第2コンベヤ上のバケットに移載している。
【先行技術文献】
【特許文献】
【0003】
特開2000-289852号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、昨今では省資源や環境保護の観点から薄型軽量の容器(物品)が増えており、コンベヤ搬送中における容器(物品)への振動の影響が相対的に大きくなっている。例えば、特許文献1のシステムでは、光電センサによって容器を検出し、一定時間経過後にカメラで同容器を撮像している。しかし、コンベヤの速度変動によって容器が前後に揺れると、光電センサが検出したときの容器の姿勢とカメラで撮影したときの容器の姿勢とが異なることがあり、撮影画像中に容器検出のための特徴部分が含まれないことがある。このような場合、当該容器はシステムによって認識されないため、ロボットは同位置に当該容器が存在しないものとして制御され、ロボットの容器保持部(グリッパなど)が当該容器に衝突し転倒させることがある。
【0005】
本発明は、物品検出にエラーが発生した場合にも、ロボットが保持する物品が他の物品と衝突することを回避できる物品処理システムを提供することを課題としている。
【課題を解決するための手段】
【0006】
本発明の第1の発明である物品処理システムは、一列に整列された状態の物品を搬送する第1搬送手段と、上記第1搬送手段の下流に設けられ、物品を搬送する第2搬送手段と、上記第1搬送手段によって搬送される物品の位置を検出する位置検出手段と、上記物品を保持する物品保持部を有するロボットと、上記位置検出手段の検出結果に基づいて、上記ロボットを制御して、上記第1搬送手段上の物品を取り上げ、その取り上げた物品を上記第2搬送手段に移載する制御装置と、を備えた物品処理システムにおいて、上記ロボットは、第1および第2物品保持部を有しており、上記制御手段は、上記第1物品保持部によって上記第1搬送手段上の物品を取り上げるための第1取り上げ動作を実行した後、上記第2物品保持部によって上記第1搬送手段上の物品を取り上げるための第2取り上げ動作を実行するものであり、上記第2取り上げ動作は、上記第2物品保持部が上記第1搬送手段の上方に位置し、かつ、上記第1物品保持部によって保持された物品が上記第1搬送手段と第2搬送手段との間に位置する状態で実行することを特徴としている。
【0007】
本発明の第2の発明である物品処理システムは、上記第1および第2搬送手段は互いの搬送方向が略平行に配置されており、上記ロボットのアーム先端に設けられたベース部材の両端に上記第1および第2物品保持部がそれぞれ取り付けられており、上記第2取り上げ動作は、上記第1および第2物品保持部を結ぶ直線が、上記第1搬送手段の搬送方向と平面視において所定角度で交差する状態で行われることを特徴としている。
【発明の効果】
【0008】
本発明によれば、物品検出にエラーが発生した場合にも、ロボットが保持する物品が他の物品と衝突することを回避できる物品処理システムを提供することができる。
【図面の簡単な説明】
【0009】
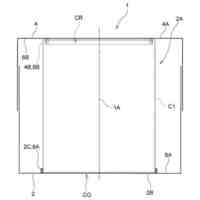
本発明の一実施形態である物品処理システムの配置を示す模式的な平面図である。
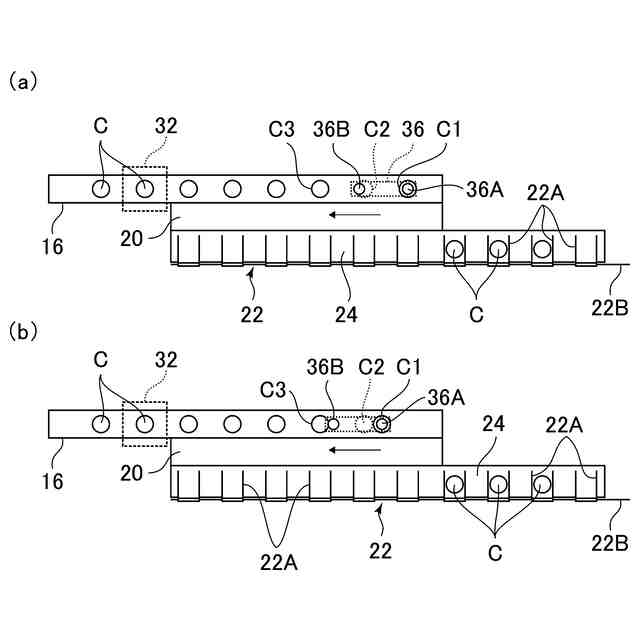
供給コンベヤからバケットコンベヤへ容器を受け渡す際に発生する問題を例示する物品処理システムの拡大平面図である。
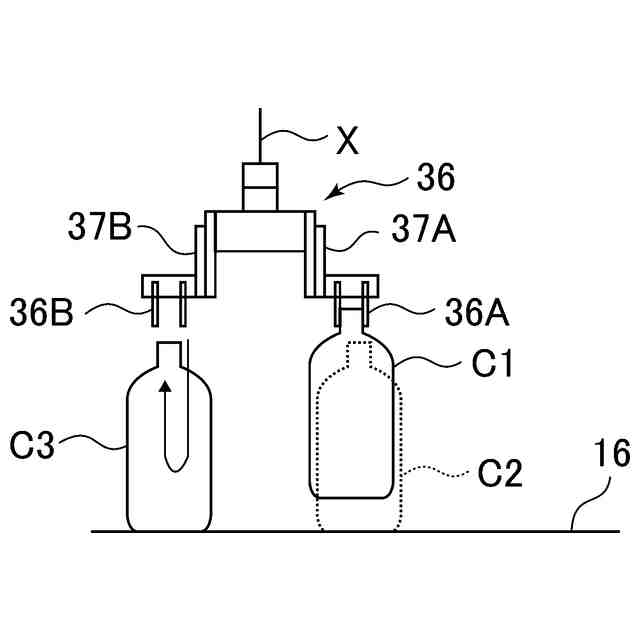
第1取り上げ動作から第2取り上げ動作へ移行する際の様子を示す物品処理システムの拡大平面図である。
図3のA方向からの矢視図である。
第2取り上げ動作の様子を示す物品処理システムの拡大平面図である。
図5のB方向からの矢視図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態を、図面を参照して説明する。図1は、本発明の一実施形態である物品処理システムの配置を示す模式的な平面図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
澁谷工業株式会社
キャッパ
1か月前
澁谷工業株式会社
物品箱詰装置
4日前
澁谷工業株式会社
物品搬送装置
1か月前
澁谷工業株式会社
清浄度監視装置
2か月前
澁谷工業株式会社
キャッピング装置
25日前
澁谷工業株式会社
ボンディング装置
2か月前
澁谷工業株式会社
容器処理システム
2か月前
個人
箱
4か月前
個人
ゴミ箱
4か月前
個人
構造体
11か月前
個人
包装体
4か月前
個人
収納用具
8か月前
個人
容器
1か月前
個人
物品収納具
8か月前
個人
土嚢運搬器具
5日前
個人
折り畳み水槽
4か月前
個人
パウチ補助具
3か月前
個人
開封用カッター
10か月前
個人
掃除楽々ゴミ箱
9か月前
個人
閉塞装置
1か月前
個人
ダンボール宝箱
4か月前
株式会社和気
包装用箱
19日前
個人
ゴミ処理機
26日前
個人
折りたたみコップ
10か月前
個人
チャック付き袋体
10か月前
個人
パウチ容器
11か月前
個人
圧縮収納袋
5か月前
積水樹脂株式会社
接着剤
9か月前
個人
塗料容器用蓋
4か月前
個人
粘着テープ剥がし具
9か月前
株式会社新弘
容器
4か月前
株式会社イシダ
箱詰装置
6か月前
株式会社新弘
容器
4か月前
三甲株式会社
容器
6か月前
個人
チャック付き保存袋
10か月前
三甲株式会社
容器
7か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ