TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024164454
公報種別
公開特許公報(A)
公開日
2024-11-27
出願番号
2023079934
出願日
2023-05-15
発明の名称
積付制御装置
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
主分類
B66F
9/24 20060101AFI20241120BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】左右方向に隣り合うパレット上の荷物同士の干渉を抑制することができる積付制御装置を提供する。
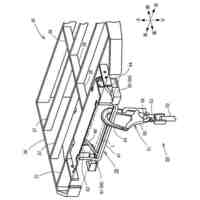
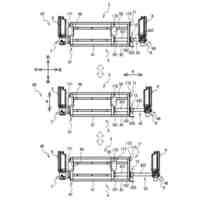
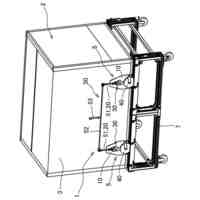
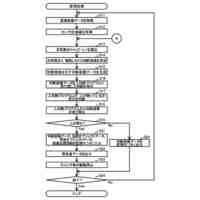
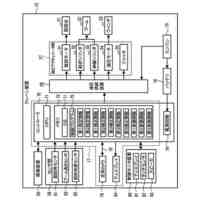
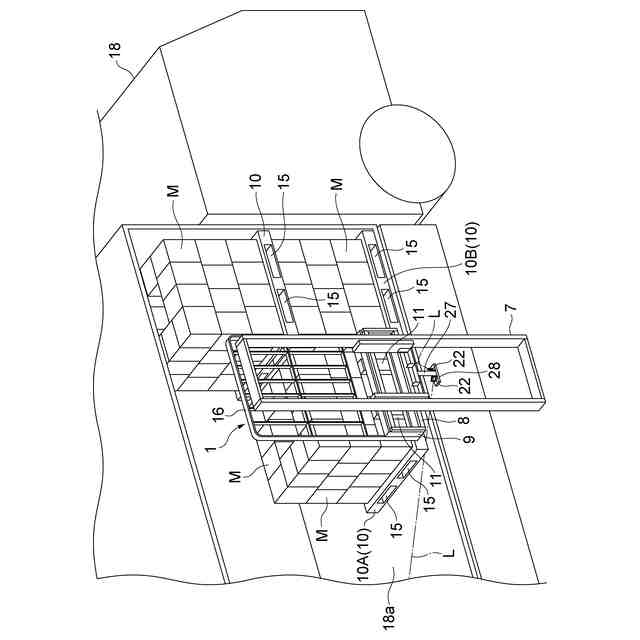
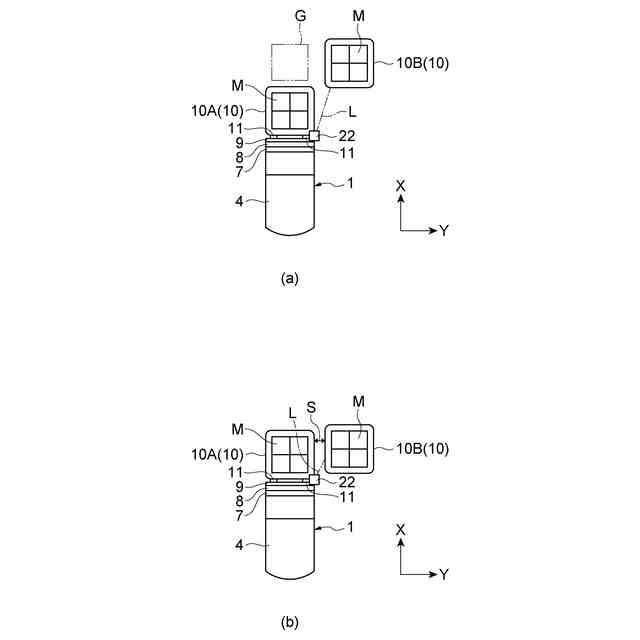
【解決手段】積付制御装置20は、保持パレット10Aが既存パレット10Bと左右方向に隣り合う積付位置Gまでフォークリフト1を走行させるように制御する走行制御部32と、既存パレット10Bの左側面10cまたは右側面10dに向けてレーザを照射して、既存パレット10Bまでの距離を検出する1Dセンサ22と、既存パレット10Bまでの距離に基づいて、フォークリフト1が積付位置Gに達した状態における保持パレット10Aと既存パレット10Bとの隙間の距離を算出する隙間距離算出部34と、保持パレット10Aと既存パレット10Bとの隙間の距離に応じて、保持パレット10Aを既存パレット10B側に寄せるようにフォークリフト1を制御するサイドシフト制御部36とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
産業車両に保持された第1パレットを既に置かれている第2パレットに対して左右方向に隣り合うように積み付ける積付制御装置であって、
前記第1パレットが前記第2パレットと左右方向に隣り合う積付位置まで前記産業車両を走行させるように制御する走行制御部と、
前記第2パレットの少なくとも側面に向けてレーザを照射してレーザの反射光を受光することにより、前記第2パレットまでの距離を検出するレーザセンサと、
前記レーザセンサにより検出された前記第2パレットまでの距離に基づいて、前記産業車両が前記積付位置に達した状態における前記第1パレットと前記第2パレットとの隙間の距離を算出する隙間距離算出部と、
前記隙間距離算出部により算出された前記第1パレットと前記第2パレットとの隙間の距離に応じて、前記第1パレットを前記第2パレット側に寄せるように前記産業車両を制御するパレット移動制御部とを備える積付制御装置。
続きを表示(約 850 文字)
【請求項2】
前記産業車両はフォークリフトであり、
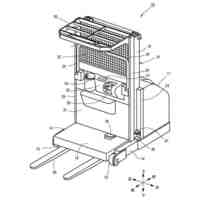
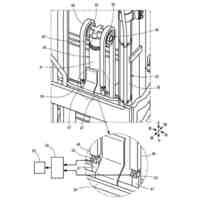
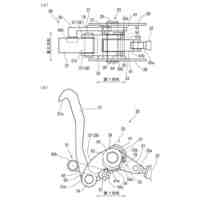
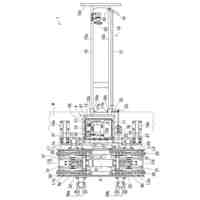
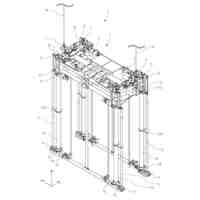
前記フォークリフトは、前記第1パレットを保持する左右1対のフォークと、前記フォークを昇降させるリフトシリンダとを有し、
前記走行制御部は、前記フォークリフトを前記積付位置まで前進走行させるように制御する請求項1記載の積付制御装置。
【請求項3】
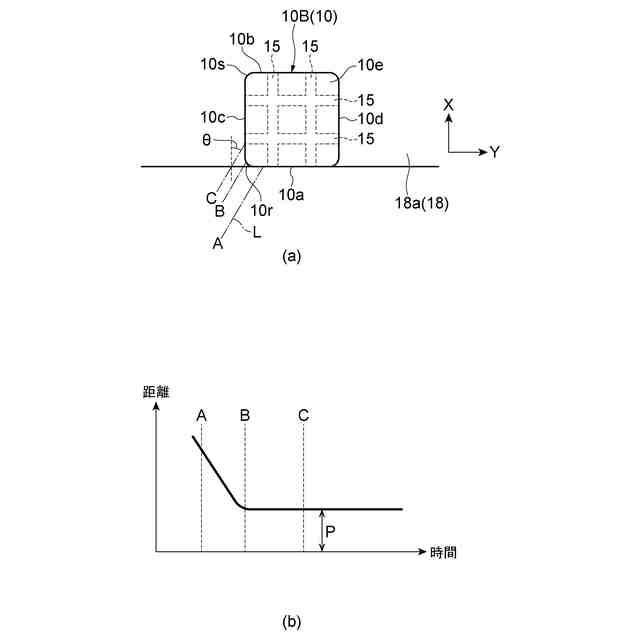
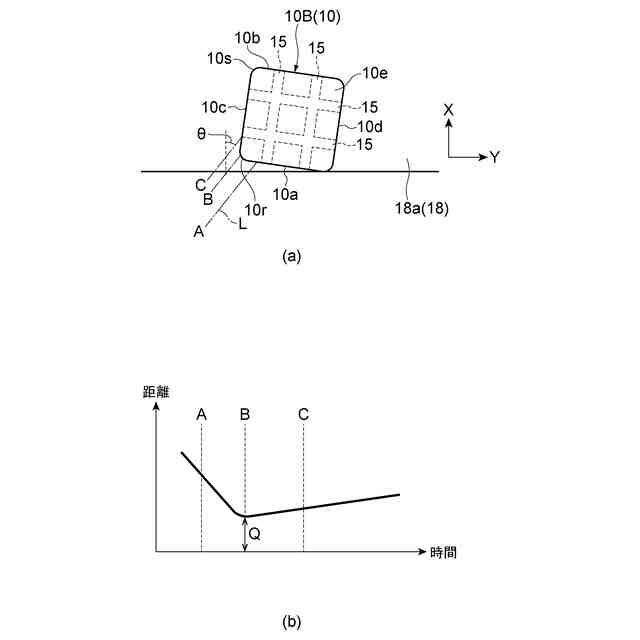
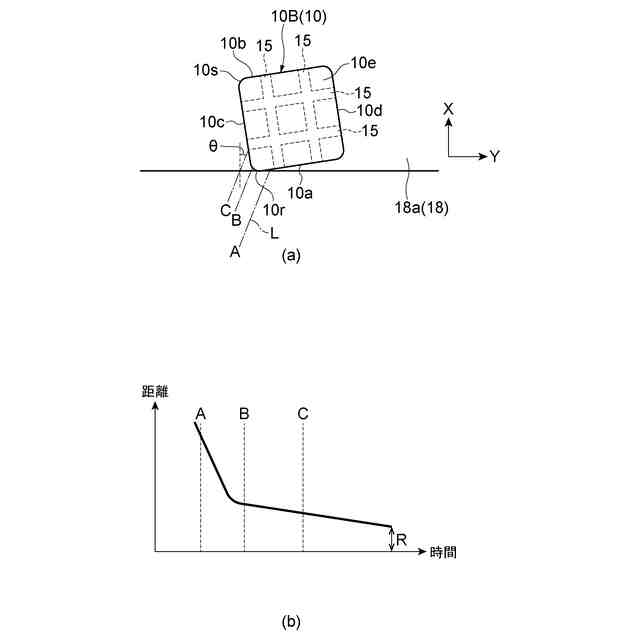
前記レーザセンサは、前記フォークリフトが前記積付位置に向かって前進走行するときに、前記第2パレットの少なくとも側面に向けて直線状のレーザを照射する1Dセンサである請求項2記載の積付制御装置。
【請求項4】
前記1Dセンサは、前記フォークリフトが前記積付位置に向かって前進走行するときに、前記直線状のレーザを前記第2パレットの前面及び側面の順で反射させるように前記フォークリフトの斜め前方に向かって照射する請求項3記載の積付制御装置。
【請求項5】
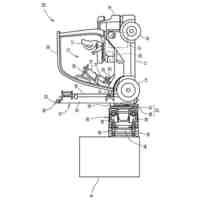
前記フォークは、マストにリフトブラケットを介して取り付けられており、
前記1Dセンサは、前記リフトブラケットの下部に取り付けられている請求項4記載の積付制御装置。
【請求項6】
前記リフトシリンダを制御する荷役制御部を更に備え、
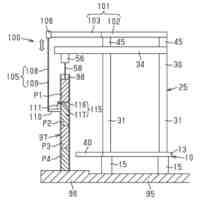
前記1Dセンサは、前記直線状のレーザを前記フォークリフトの斜め前方に向かって水平方向に照射し、
前記荷役制御部は、前記フォークリフトを前記積付位置に向かって前進走行させる前に、前記1Dセンサの高さ位置が前記第2パレットの高さ位置と一致するまで前記フォークが昇降するように前記リフトシリンダを制御する請求項5記載の積付制御装置。
【請求項7】
前記フォークリフトは、前記フォークを横方向に移動させるサイドシフトシリンダを更に有し、
前記パレット移動制御部は、前記第1パレットを前記第2パレット側に寄せるように前記サイドシフトシリンダを制御する請求項2~6の何れか一項記載の積付制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、積付制御装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
例えば特許文献1には、無人フォークリフトが記載されている。特許文献1に記載の無人フォークリフトは、マストに沿って昇降するフォークと、このフォークを車体の幅方向(左右方向)にシフトさせるサイドシフト装置と、車体の周囲にレーザーを投光し、複数の反射板からの反射光を検出するレーザースキャナ装置とを備え、レーザースキャナ装置により車体の現在地情報を取得しながら走行ルートに従って走行する。
【先行技術文献】
【特許文献】
【0003】
特開2021-143039号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
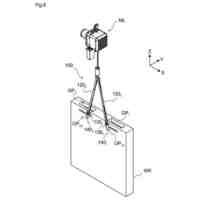
ところで、フォークリフトによってトラックの荷台に対してパレットの積付を行う際、サイドシフト装置により左右方向に隣り合うパレット同士を当接させることで、隣り合うパレット間に隙間がないように荷台上にパレットを置くことがある。しかし、隣り合うパレット同士が当接すると、隣り合うパレット上の荷物同士が干渉し、荷物が破損したり荷崩れを起こしたりする等の不具合が発生する可能性がある。
【0005】
本発明の目的は、左右方向に隣り合うパレット上の荷物同士の干渉を抑制することができる積付制御装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の一態様は、産業車両に保持された第1パレットを既に置かれている第2パレットに対して左右方向に隣り合うように積み付ける積付制御装置であって、第1パレットが第2パレットと左右方向に隣り合う積付位置まで産業車両を走行させるように制御する走行制御部と、第2パレットの少なくとも側面に向けてレーザを照射してレーザの反射光を受光することにより、第2パレットまでの距離を検出するレーザセンサと、レーザセンサにより検出された第2パレットまでの距離に基づいて、産業車両が積付位置に達した状態における第1パレットと第2パレットとの隙間の距離を算出する隙間距離算出部と、隙間距離算出部により算出された第1パレットと第2パレットとの隙間の距離に応じて、第1パレットを第2パレット側に寄せるように産業車両を制御するパレット移動制御部とを備える。
【0007】
このような積付制御装置においては、産業車両に保持された第1パレットが既に置かれている第2パレットと左右方向に隣り合う積付位置まで産業車両が走行するように制御されると共に、レーザセンサから第2パレットの少なくとも側面に向けてレーザが照射されることで、第2パレットまでの距離が検出される。そして、第2パレットまでの距離に基づいて、産業車両が積付位置に達した状態における第1パレットと第2パレットとの隙間の距離が算出される。そして、第1パレットと第2パレットとの隙間の距離に応じて、第1パレットを第2パレット側に寄せるように産業車両が制御される。このとき、第1パレットを第2パレットに対して寄せ過ぎないように産業車両が制御される。これにより、左右方向に隣り合うパレット上の荷物同士の干渉が抑制される。
【0008】
産業車両はフォークリフトであり、フォークリフトは、第1パレットを保持する左右1対のフォークと、フォークを昇降させるリフトシリンダとを有し、走行制御部は、フォークリフトを積付位置まで前進走行させるように制御してもよい。このような構成では、フォークリフトを積付位置に向かって前進走行させながら、レーザセンサにより第2パレットまでの距離を検出することができる。また、積付位置においてフォークリフトのフォークを下降させることで、第1パレットを容易に第2パレットに対して左右方向に隣り合うように積み付けることができる。
【0009】
レーザセンサは、フォークリフトが積付位置に向かって前進走行するときに、第2パレットの少なくとも側面に向けて直線状のレーザを照射する1Dセンサであってもよい。このような構成では、レーザセンサとして直線状のレーザを照射する安価な1Dセンサを使用することにより、コスト削減を図ることができる。
【0010】
1Dセンサは、フォークリフトが積付位置に向かって前進走行するときに、直線状のレーザを第2パレットの前面及び側面の順で反射させるようにフォークリフトの斜め前方に向かって照射してもよい。このような構成では、フォークリフトの前進走行に伴って、まず直線状のレーザが第2パレットの前面で反射し、その後直線状のレーザが第2パレットの側面で反射する。第2パレットにおける前面と側面との境界である角部は、第2パレットまでの距離が大きく変化する変化点となる。このような第2パレットの角部が検知されるため、パレットの判別の解析処理を容易に行うことができる。また、第2パレットの前面が検知されるため、第2パレットに対する第1パレットの奥行方向の積付精度を向上させることができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
懸吊装置
5か月前
ユニパルス株式会社
吊具
7か月前
個人
海上コンテナ昇降装置
2か月前
ユニパルス株式会社
吊具装置
2か月前
ユニパルス株式会社
荷役装置
1か月前
株式会社豊田自動織機
荷役車両
11か月前
株式会社豊田自動織機
荷役車両
1か月前
株式会社豊田自動織機
荷役車両
6か月前
株式会社豊田自動織機
荷役車両
9か月前
株式会社豊田自動織機
荷役車両
24日前
株式会社豊田自動織機
荷役車両
10か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社日本キャリア工業
昇降機
5か月前
ユニパルス株式会社
荷役助力装置
9か月前
株式会社北川鉄工所
吊荷制御方法
11か月前
個人
建築部材の吊り上げ装置
4か月前
株式会社ニシキ
可変型吊り天秤
9か月前
株式会社大林組
養生方法
4か月前
大同特殊鋼株式会社
治具
10か月前
株式会社豊田自動織機
フォークリフト
7か月前
フジテック株式会社
エレベータ
12か月前
フジテック株式会社
エレベータ
1か月前
株式会社キトー
吊具
5か月前
白山工業株式会社
腕重量補償機構
4か月前
ブラザー工業株式会社
架台
7か月前
ブラザー工業株式会社
架台
7か月前
株式会社タダノ
高所作業車
4か月前
ウエダ産業株式会社
鋼板保持装置
6か月前
小野谷機工株式会社
ジャッキ装置
7か月前
有限会社サエキ
玉掛用器具
2か月前
ダイハツ工業株式会社
荷箱移動装置
8か月前
株式会社大林組
作業システム
4か月前
株式会社タダノ
クレーン装置
7か月前
株式会社キトー
巻上機
7か月前
株式会社慧泉
搬送装置
7か月前
株式会社タダノ
クレーン装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ