TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024159524
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2024045553
出願日
2024-03-21
発明の名称
テープ材制御装置、テープ材制御装置の制御方法、物品の製造方法、プログラム、記録媒体
出願人
キヤノン株式会社
代理人
弁理士法人近島国際特許事務所
主分類
B65H
35/07 20060101AFI20241031BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】装置全体の大型化を招くことなく、汎用性を向上する。
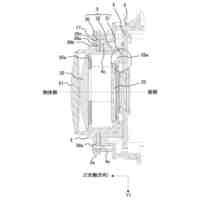
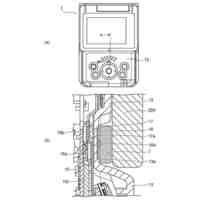
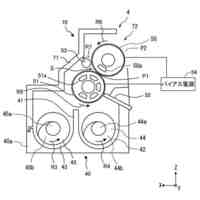
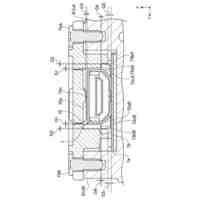
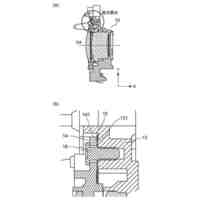
【解決手段】テープ材(201)を供給する供給部(301)と、テープ材を送出する第1ローラ(302)と、第1ローラを回転させる第1回転駆動部と、剥離部材を搬送する第2ローラ(307)と、第2ローラを回転させる第2回転駆動部と、シール部材を巻付け可能な第3ローラ(105)と、第3ローラを回転させる第3回転駆動部と、制御部と、を有する。制御部は、第1回転駆動部によりテープ材の送出速度と、第2回転駆動部により剥離部材の搬送速度と、第3回転駆動部によりシール部材の巻付け速度とを、それぞれ個別に制御する。
【選択図】図12
特許請求の範囲
【請求項1】
剥離部材と剥離部材から剥離可能なシール部材とを有するテープ材を供給する供給部と、
剥離部材からシール部材が剥離される剥離位置に、前記供給部から供給されるテープ材を送出する第1ローラと、
前記第1ローラを回転させる第1回転駆動部と、
前記剥離位置でシール部材が剥離された剥離部材を搬送する第2ローラと、
前記第2ローラを回転させる第2回転駆動部と、
前記剥離位置で剥離されたシール部材を巻付け可能な第3ローラと、
前記第3ローラを回転させる第3回転駆動部と、
制御部と、を備え、
前記制御部は、前記第1回転駆動部によりテープ材の送出速度と、前記第2回転駆動部により剥離部材の搬送速度と、前記第3回転駆動部によりシール部材の巻付け速度とを、それぞれ個別に制御する、
ことを特徴とするテープ材制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記供給部と、前記第1ローラと、前記第1回転駆動部と、前記第2ローラと、前記第2回転駆動部と、を備えた供給装置と、
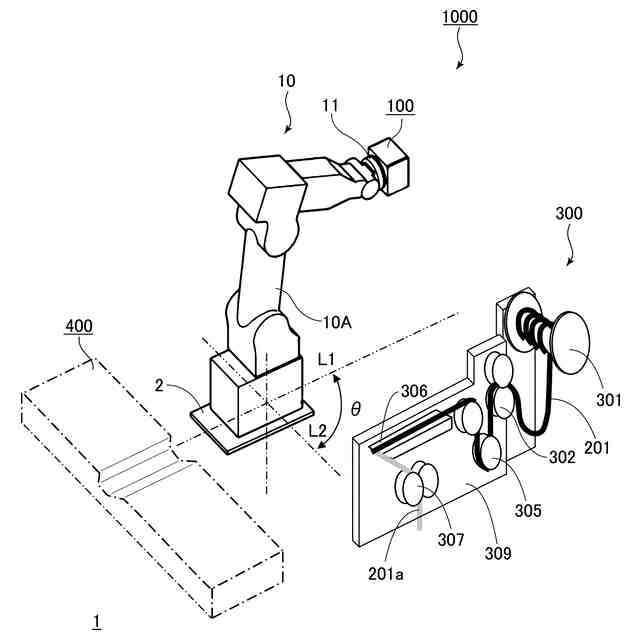
前記第3ローラと、前記第3回転駆動部を有するエンドエフェクタと、前記エンドエフェクタが取付けられるロボット本体と、を備えたロボット装置と、を備え、
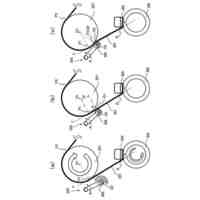
前記制御部が、前記送出速度と、前記搬送速度と、前記巻き付け速度と、をそれぞれ個別に制御することで、前記第3ローラに巻付けるシール部材の長さよりも前記エンドエフェクタの移動距離を短くしつつ、前記供給装置から前記ロボット装置にシール部材を供給する、
ことを特徴とする請求項1に記載のテープ材制御装置。
【請求項3】
前記制御部は、前記ロボット本体の姿勢を維持した状態で前記第3ローラにシール部材を巻付ける、
ことを特徴とする請求項2に記載のテープ材制御装置。
【請求項4】
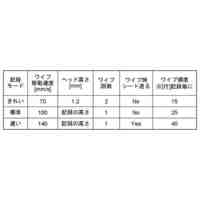
前記制御部は、シール部材の種類に応じて、前記第3回転駆動部により制御される前記第3ローラの回転速度を調整する、
ことを特徴とする請求項2に記載のテープ材制御装置。
【請求項5】
前記制御部は、シール部材の厚みに応じて、前記第3回転駆動部により制御される前記第3ローラの回転速度を調整する、
ことを特徴とする請求項3に記載のテープ材制御装置。
【請求項6】
前記制御部は、シール部材の圧縮率に応じて、前記第3回転駆動部により制御される前記第3ローラの回転速度を調整する、
ことを特徴とする請求項3に記載のテープ材制御装置。
【請求項7】
前記エンドエフェクタは、前記第3ローラを前記第3ローラの軸方向に移動させる軸方向移動部を有し、
前記制御部は、前記第3回転駆動部による前記第3ローラの回転に同期させて、前記軸方向移動部により前記第3ローラを前記軸方向に移動させ、前記第3ローラにシール部材を螺旋状に巻付ける、
ことを特徴とする請求項2に記載のテープ材制御装置。
【請求項8】
前記供給装置は、前記剥離位置におけるテープ材にテンションを付与するダンサーローラを備える、
ことを特徴とする請求項2に記載のテープ材制御装置。
【請求項9】
前記ダンサーローラは、前記第1ローラと前記第2ローラとの間にあるテープ材の通過経路の距離を伸縮するように移動可能に支持され、
前記供給装置は、前記ダンサーローラの位置を検知する第1検知部を有し、
前記制御部は、前記第1検知部の検知結果に応じて、前記第2回転駆動部により制御される剥離部材の搬送速度に対する、前記第1回転駆動部により制御されるテープ材の送出速度を調整する、
ことを特徴とする請求項8に記載のテープ材制御装置。
【請求項10】
前記供給装置は、前記ダンサーローラの位置が正常な移動範囲を超えた異常位置であることを検知する第2検知部を有し、
前記制御部は、前記第2検知部により前記ダンサーローラが異常位置であることを検知した際に、前記供給装置及び前記ロボット装置を停止する、
ことを特徴とする請求項9に記載のテープ材制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、テープ材制御装置、テープ材制御装置の制御方法、物品の製造方法、プログラム、記録媒体に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、ワークに対してシール部材を貼付ける作業は、熟練した作業者によって行われることが一般的であるが、高精度かつ高速にシール部材の貼付けを行うために自動化が望まれている。そのため、シール部材をワークに対して貼付ける装置の開発が行われている。さらに、このような貼付けを行う装置には、剥離部材とシール部材とで構成されたテープ材からシール部材を剥離して、その貼付けを行う装置にシール部材を供給する必要があり、その自動化も望まれている。
【0003】
そのため、テープ材を治具にセットしておき、ロボットの先端に設けたリールを治具に沿って移動させつつ回転させ、テープ材本体を剥離紙から剥離しつつリールに巻付けることで、リールにテープ材本体を供給するものが提案されている(特許文献1参照)。
【0004】
また、供給リールから粘着テープ材を剥離ユニットに供給し、剥離ユニットにより被着体表面に仮着された保護シートに粘着テープ材を貼付け、剥離ユニットを移動させつつ被着体表面から保護シートを剥離するものも提案されている(特許文献2参照)。
【先行技術文献】
【特許文献】
【0005】
特開2022-65833号公報
特開2020-47767号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1のものは、ロボットの可動範囲よりも長いテープ材本体をリールに巻付けることができず、テープ材本体をワークに貼付け可能な長さが制限されるため、汎用性が低いという問題がある。また、特許文献2のものでは、粘着テープ材を半自動的に供給できて作業負荷の軽減が図られるものの、同様に剥離ユニットを移動させる構成であるため、汎用性が低いという問題がある。
【0007】
そこで本発明は、汎用性を向上することが可能なテープ材制御装置、テープ材制御装置の制御方法、物品の製造方法、プログラム、記録媒体を提供することを目的とするものである。
【課題を解決するための手段】
【0008】
本発明の一態様は、剥離部材と剥離部材から剥離可能なシール部材とを有するテープ材を供給する供給部と、剥離部材からシール部材が剥離される剥離位置に、前記供給部から供給されるテープ材を送出する第1ローラと、前記第1ローラを回転させる第1回転駆動部と、前記剥離位置でシール部材が剥離された剥離部材を搬送する第2ローラと、前記第2ローラを回転させる第2回転駆動部と、前記剥離位置で剥離されたシール部材を巻付け可能な第3ローラと、前記第3ローラを回転させる第3回転駆動部と、制御部と、を備え、前記制御部は、前記第1回転駆動部によりテープ材の送出速度と、前記第2回転駆動部により剥離部材の搬送速度と、前記第3回転駆動部によりシール部材の巻付け速度とを、それぞれ個別に制御する、ことを特徴とするテープ材制御装置である。
【0009】
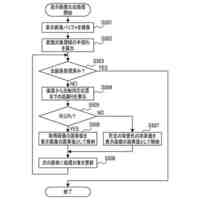
本発明の一態様は、剥離部材と剥離部材から剥離可能なシール部材とを有するテープ材を供給する供給部と、剥離部材からシール部材が剥離される剥離位置に、前記供給部から供給されるテープ材を送出する第1ローラと、前記第1ローラを回転させる第1回転駆動部と、前記剥離位置でシール部材が剥離された剥離部材を搬送する第2ローラと、前記第2ローラを回転させる第2回転駆動部と、前記剥離位置で剥離されたシール部材を巻付け可能な第3ローラと、前記第3ローラを回転させる第3回転駆動部と、制御部と、を備えたテープ材制御装置の制御方法において、前記制御部が、前記第1回転駆動部によりテープ材の送出速度と、前記第2回転駆動部により剥離部材の搬送速度と、前記第3回転駆動部によりシール部材の巻付け速度とを、それぞれ個別に制御する、ことを特徴とするテープ材制御装置の制御方法である。
【0010】
本発明の一態様は、剥離部材と剥離部材から剥離可能なシール部材とを有するテープ材を供給する供給部と、シール部材を切断する切断刃と、切断したシール部材を吸着把持する吸着部と、を有する切断ユニットと、剥離部材から切断したシール部材が剥離される剥離位置に、前記供給部から供給されるテープ材を送出する第1ローラと、前記第1ローラを回転させる第1回転駆動部と、前記剥離位置で切断されたシール部材が剥離された剥離部材を搬送する第2ローラと、前記第2ローラを回転させる第2回転駆動部と、前記切断ユニットを、前記剥離位置と切断したシール部材を貼付ける貼付け位置とにそれぞれ移動させるロボットと、制御部と、を備え、前記制御部は、前記第1回転駆動部によりテープ材の送出速度と、前記第2回転駆動部により剥離部材の搬送速度とを、それぞれ個別に制御する、ことを特徴とするテープ材制御装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
鏡筒
21日前
キヤノン株式会社
ボトル
21日前
キヤノン株式会社
電子機器
今日
キヤノン株式会社
発光装置
8日前
キヤノン株式会社
電子機器
今日
キヤノン株式会社
撮像装置
15日前
キヤノン株式会社
電子機器
21日前
キヤノン株式会社
撮像装置
15日前
キヤノン株式会社
電子機器
8日前
キヤノン株式会社
撮像装置
1日前
キヤノン株式会社
撮像装置
10日前
キヤノン株式会社
記録装置
今日
キヤノン株式会社
記録装置
10日前
キヤノン株式会社
記録装置
8日前
キヤノン株式会社
撮像装置
8日前
キヤノン株式会社
電気機器
21日前
キヤノン株式会社
測距装置
8日前
キヤノン株式会社
発光装置
16日前
キヤノン株式会社
撮像装置
9日前
キヤノン株式会社
撮像装置
15日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
現像装置
14日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
撮像装置
15日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
定着装置
14日前
キヤノン株式会社
現像装置
14日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
電子機器
15日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
光学装置
8日前
キヤノン株式会社
レンズ鏡筒
15日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ