TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024156541
公報種別
公開特許公報(A)
公開日
2024-11-06
出願番号
2023071093
出願日
2023-04-24
発明の名称
ロボットハンド及びそれを備えるドローン
出願人
西武建設株式会社
,
学校法人東京理科大学
,
国立研究開発法人建築研究所
代理人
個人
主分類
B25J
5/00 20060101AFI20241029BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】係留時に係留対象等を損傷させることがなく、利便性を向上させたロボットハンド装置及びそれを備えるドローンを提供する。
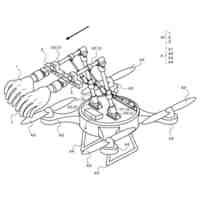
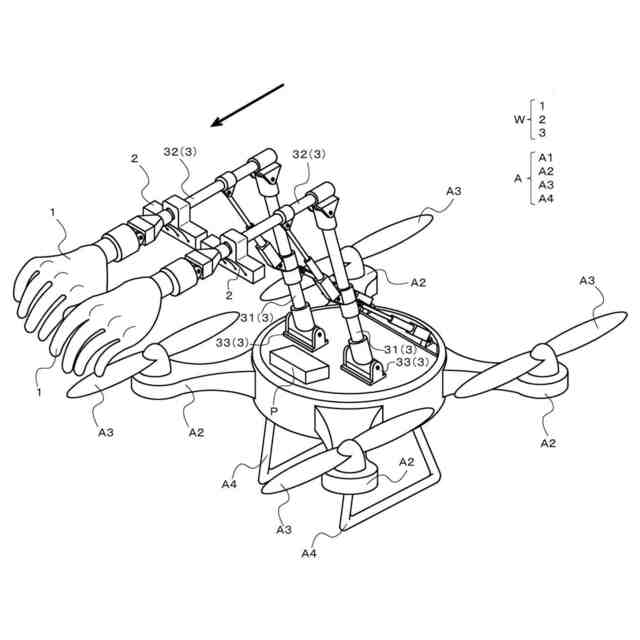
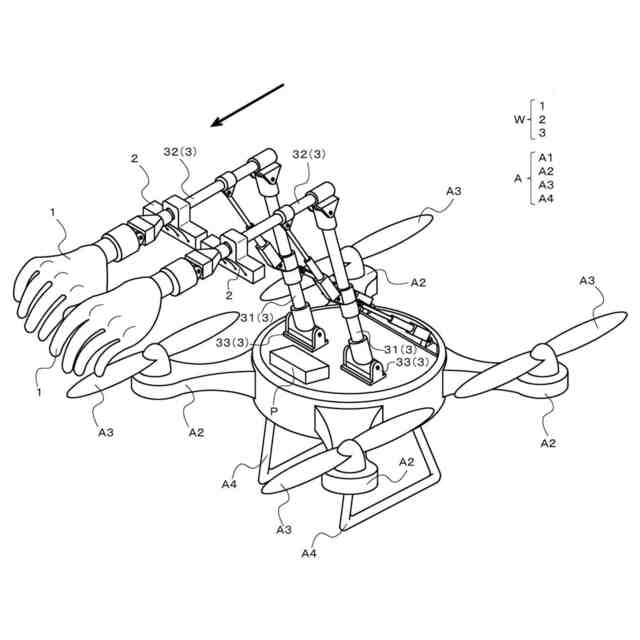
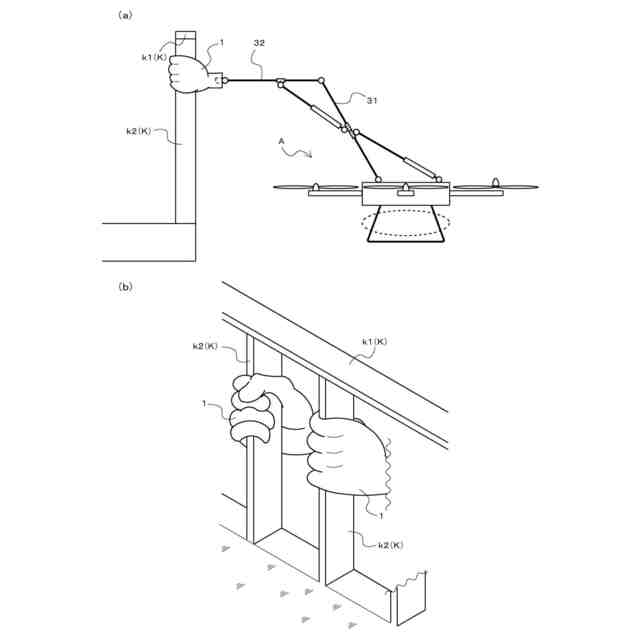
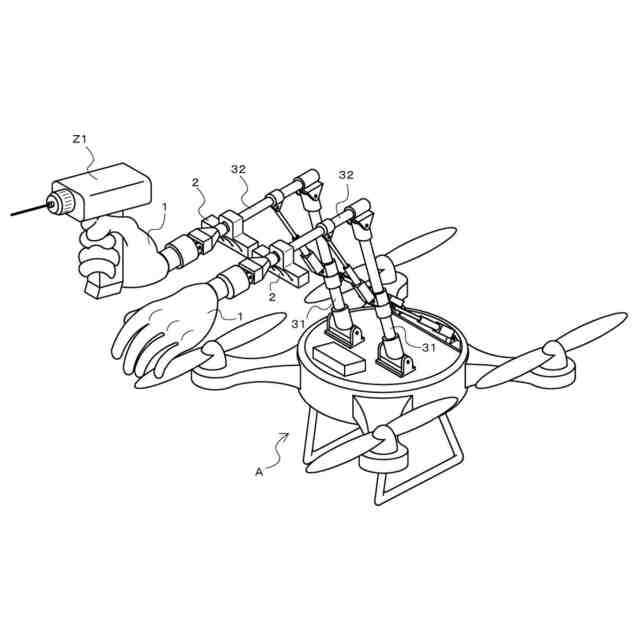
【解決手段】ドローンAに取付けられるロボットハンド装置Wであって、人の手を模したロボットハンド本体1と、ロボットハンド本体1の各指部f1~f5に開閉動作を実行させる指部開閉手段2と、を備え、ロボットハンド本体1は、少なくともその外周面が、柔軟性を有する素材により形成されている。
【選択図】図1
特許請求の範囲
【請求項1】
ドローンに取付けられるロボットハンド装置であって、
人の手を模したロボットハンド本体と、前記ロボットハンド本体の各指部に開閉動作を実行させる指部開閉手段と、を備え、
前記ロボットハンド本体は、少なくともその外周面が、柔軟性を有する素材により形成されている、ロボットハンド装置。
続きを表示(約 750 文字)
【請求項2】
前記ロボットハンド本体は、全体がソフトマテリアルにより形成されている、請求項1に記載のロボットハンド装置。
【請求項3】
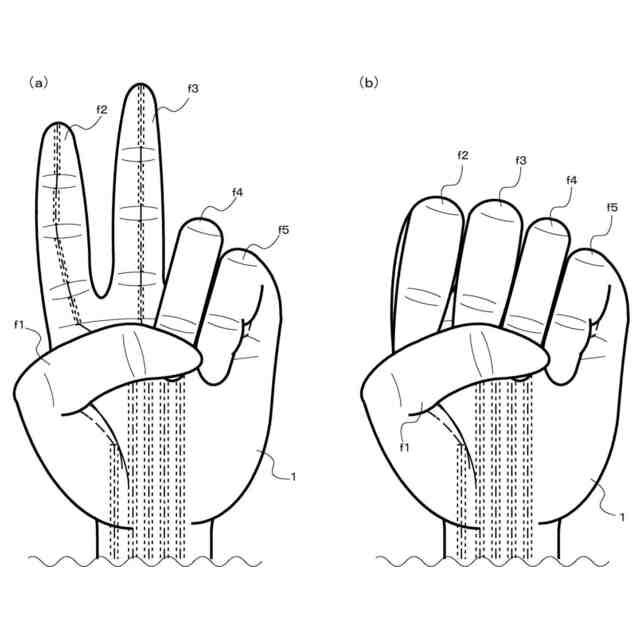
前記指部開閉手段は、前記各指部について独立して開閉動作を実行可能に構成されている、請求項1又は2に記載のロボットハンド装置。
【請求項4】
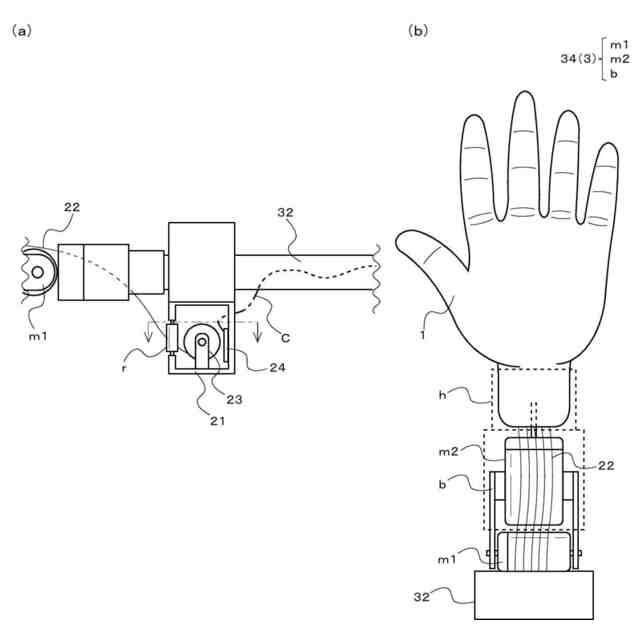
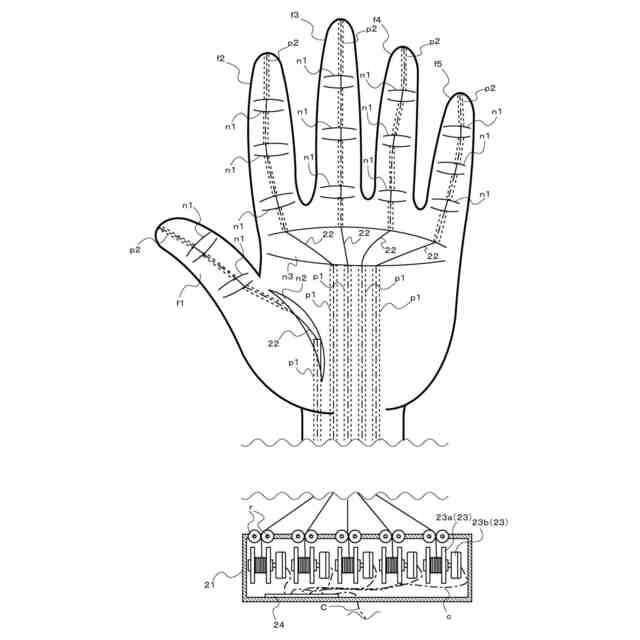
前記指部開閉手段は、その一端が前記各指部の先端側に固定され、その他端が前記各指部の基端側に延びる索部材と、前記各索部材を前記各指部の基端側に牽引する牽引手段と、を有し、
前記各指部は、ソフトマテリアルの弾性力でもって、開状態となる方向に付勢されており、前記各索部材が前記牽引手段により牽引されることで、閉状態に遷移するように構成されている、請求項3に記載のロボットハンド装置。
【請求項5】
前記牽引手段は、前記各索部材が巻回されるボビンと、前記ボビンを、前記各索部材を巻取る方向に回動させる回動手段と、を含み、
前記回動手段は、遠隔で駆動制御可能なモータである、請求項4に記載のロボットハンド装置。
【請求項6】
前記各指部の内部には、空洞が設けられ、
前記指部開閉手段は、前記空洞への空気の流入及び流出でもって、前記各指部を膨張及び収縮させることで、前記各指部に開閉動作を実行させる、請求項2に記載のロボットハンド装置。
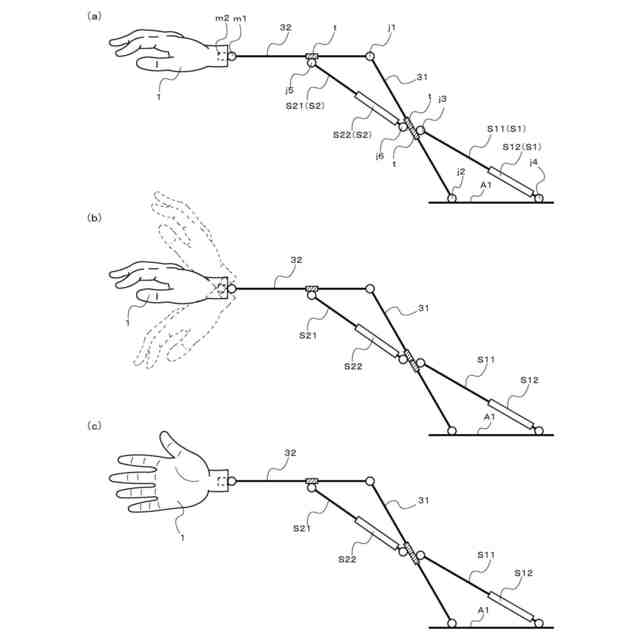
【請求項7】
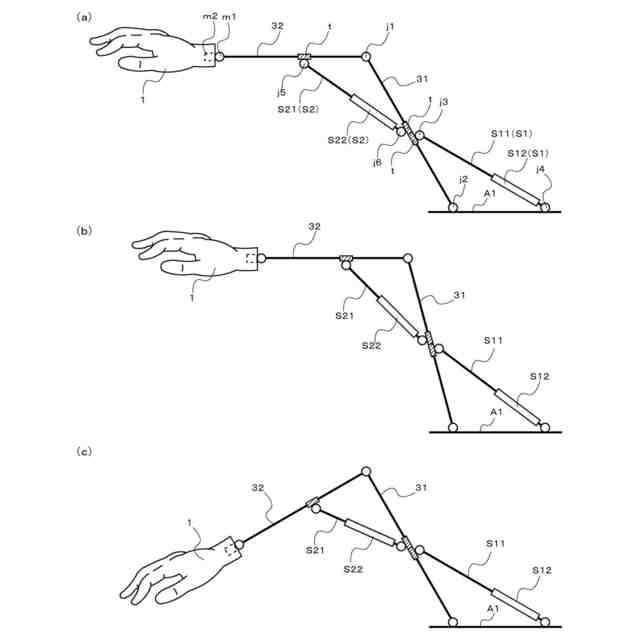
前記ロボットハンド本体の基端から延び、複数の関節が形成されたアーム部を備え、
前記アーム部は、その基端が前記ドローンの上面に取付けられている、請求項1に記載のロボットハンド装置。
【請求項8】
請求項1に記載のロボットハンド装置を備えたドローン。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットハンド及びそれを備えるドローンに関するものである。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
近年、スマートフォンやインターネットといったテクノロジーの発展を背景に、ドローンが世界的に普及している。ドローンとは、遠隔操作や自動制御によって無人で飛行できる航空機であり、マルチコプターとも呼ばれる。
【0003】
ドローンの利用用途としては、予め装着されたカメラや点検器具を用いて、特に高層ビルの外壁等、人力のみで実施困難な範囲の空撮や点検等を行う、荷物を運搬するといった用途が挙げられる。
【0004】
特に、荷物の運搬を実施するにあたって、特許文献1に示すように、ロボットハンドを備えたドローンが提案されている。
このロボットハンド(エンドエフェクタ)は、ロボットアームを構成するリンク機構の先端部に設けられており、ロボットアームを含め、剛性を有するパーツでもって機械的に構成されている。
【先行技術文献】
【特許文献】
【0005】
特許第6371959号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
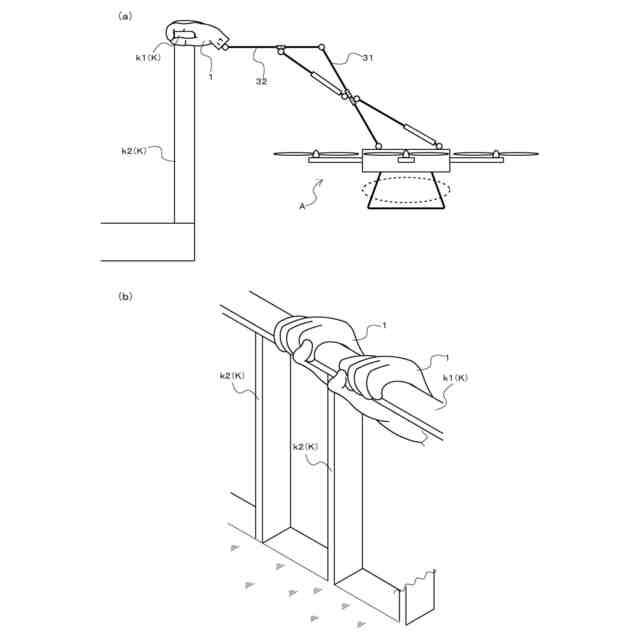
ところで、特許文献1のようなロボットアームを備えたドローンについて、上記のような荷物の運搬のみならず、外壁の点検等に利用する場合、ドローンの飛行位置を安定させるために、ロボットハンドを手摺等の係留対象に係留させる利用態様が想定される。
【0007】
しかしながら、上記のようなロボットハンドの場合、係留時に係留対象等を損傷させてしまう恐れがあり、外壁の点検等への積極的な利用が困難となる、という問題があった。
【0008】
本発明は上記のような実状に鑑みてなされたものであって、係留時に係留対象等を損傷させることがなく、利便性を向上させたロボットハンド装置及びそれを備えるドローンを提供することを課題とする。
【課題を解決するための手段】
【0009】
上記課題を解決するための本発明は、ドローンに取付けられるロボットハンド装置であって、
人の手を模したロボットハンド本体と、前記ロボットハンド本体の各指部に開閉動作を実行させる指部開閉手段と、を備え、
前記ロボットハンド本体は、少なくともその外周面が、柔軟性を有する素材により形成されている。
【0010】
本発明によれば、ロボットハンド本体の外周面が、柔軟性を有する素材により形成されていることで、作業者は、ロボットハンド本体を係留対象に係留させる際、係留対象を損傷させることなく、ドローンの飛行位置を安定させることができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
西武建設株式会社
ロボットハンド及びそれを備えるドローン
5か月前
西武建設株式会社
作業支援システム、作業支援方法、及び作業支援プログラム
5日前
西武建設株式会社
作業支援システム、作業支援方法、及び作業支援プログラム
5日前
個人
腰袋
1か月前
川崎重工業株式会社
ハンド
18日前
株式会社アイセイ
搬送装置
24日前
個人
けがき用治具
12日前
国立大学法人金沢大学
ロボット
1か月前
株式会社不二越
ロボット
10日前
株式会社マキタ
電動工具
1か月前
株式会社不二越
ロボット操作装置
9日前
個人
深孔スリーブ駆動ロッド構造
2日前
株式会社ケー・エフ・シー
締結構造
1か月前
川崎重工業株式会社
ロボット
10日前
川崎重工業株式会社
ロボットシステム
18日前
株式会社黒澤鉄工製作所
けがき用治具
12日前
株式会社デンソー
操縦桿
10日前
日本信号株式会社
作業機制御システム
1か月前
個人
バール
2日前
梅馨堂合同会社
人協働ロボットシステム
4日前
株式会社京阪エンジニアリング
脱着装置
1か月前
株式会社マキタ
集塵アタッチメント
1か月前
トヨタ自動車株式会社
把持装置、把持方法
1か月前
アピュアン株式会社
衝撃工具
25日前
株式会社スター精機
ワーク搬送装置
1か月前
株式会社不二越
基板搬送用ロボット
19日前
ARMA株式会社
UI付エンドエフェクタ
5日前
株式会社コスメック
把持装置
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
国立大学法人 東京大学
ロボットアーム
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
原利興工業有限公司
工具用スリーブ
1か月前
株式会社不二越
ロボットビジョンシステム
1か月前
株式会社マキタ
電動工具
24日前
若井ホールディングス株式会社
レンチ構造とその製造方法
12日前
株式会社マキタ
作業機
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ